
基于多源数据融合的河道冲淤监测技术
2024-05-14 17:06:15刘小杰何庐山周儒夫
水利水电快报 2024年4期
关键词:三维模型
刘小杰 何庐山 周儒夫
摘要:开展河道陆上和水下地形测量时,单一的测量方法和孤岛数据已经满足不了河道数字化发展。提出了基于多无人智能系统协同采集河道数据,融合构建三维模型,计算分析冲淤量的监测技术方案,并开展了荆州长江大桥冲淤监测项目和公安河弯段河道地形观测项目试验。结果表明:该技术方案精度能够满足大比例尺河道冲淤监测项目要求,构建的三维模型能提升监测数据整体质量;三维模型平面精度高,在陆上三维模型高程精度方面,低密度植被覆盖的区域有94.2%的点误差在0.25 m以内,高密度植被覆盖的区域有82.91%的点误差在0.25 m以內;项目监测效率整体提升20%以上。该技术方案与传统作业方式相比,数据产品形式更加丰富,监测质量和效率明显提高,在大部分河道测区具有较高的可行性。
关键词:河道冲淤监测; 多源数据; 大比例尺; 三维模型; 荆江河段
中图法分类号:TV82 文献标志码:A DOI:10.15974/j.cnki.slsdkb.2024.04.009
文章编号:1006-0081(2024)04-0052-07
0 引 言
河道冲淤监测与分析是认识河道演变过程的必要手段,是防洪减灾、河道整治、生态保护、水利工程建设等业务的重要基础工作。目前的河道监测手段仍以传统人工接触式测量方法为主,耗时耗力,效率低,部分水上区域存在安全隐患。在河道监测数据采集方面,数字航空摄影测量、机载激光LiDAR、无人船水下测量、单波束与多波束测量等技术手段已广泛应用,但单一的技术手段受自身原理、技术瓶颈和河道环境等因素制约,在实际中会遇到各类不同问题而无法获取数据,需要协同工作来获取多源数据,融合分析,满足河道监测工作的需求[1]。
本文通过构建三维模型,进行河道冲淤分析。在对多源数据融合构建三维模型和分析方面,国内外许多学者进行了研究,夏祖伟等[2]融合
雷达点云与正射影像进行河湖划界;Hujebri等 [3]研究了正射影像和LiDAR 数据融合并自动提取建筑物模型的方法;Secord等[4]探讨了利用 LiDAR数据得到的DEM和其对应的影像资料进行特征提取的方法;LIU[5]融合传统测量数据和测深数据分析水库地形淤积量,还有许多学者研究了正射、倾斜影像和点云融合在精细模型重建方面的应用。针对河道监测的相关技术要求,考虑到倾斜模型的利用率不高,效率和成本都不如正射影像与点云数据生产,本文在融合陆上数据时主要使用平面位置精度高的正射影像数据和高程质量较好的点云数据。
河道河床不断冲刷变化,水位涨落无规律,河道监测综合因素多,需将几种技术同时应用于同一区域采集数据,并对水陆一体化模型进行可靠性分析。目前,水陆接边问题的研究仍然较少,可借鉴的监测方案不多。本文通过分析比较各技术手段的数据获取方法和效率,提出多系统协同监测方案,降低模型水陆接边方面误差,提升模型整体精度,并进行精度评定,得出本文河道冲淤监测技术实施方案可行性结论,为相关河道监测工作提供一定参考。
1 河道冲淤监测技术简介及技术路线
1.1 技术简介
本文提出的河道冲淤监测技术,主要是以数字航空摄影测量、机载激光LiDAR数据获取技术、单波束与多波束测量等测量技术为基础,利用无人机、无人船等载体,协同测量获取实时数据,快速融合生成高精度三维模型。主要特点为多源数据的相互融合,解决监测区域单一数据的采集缺失、空白等问题;无人机、无人船协同工作,实时监测能力提高,能高效率、高质量输出成果;水陆一体化实景模型的生成与多样性成果的输出,可提高河道冲淤监测的时间、空间分辨率,提升河道冲淤分析能力[6]。
1.2 技术路线
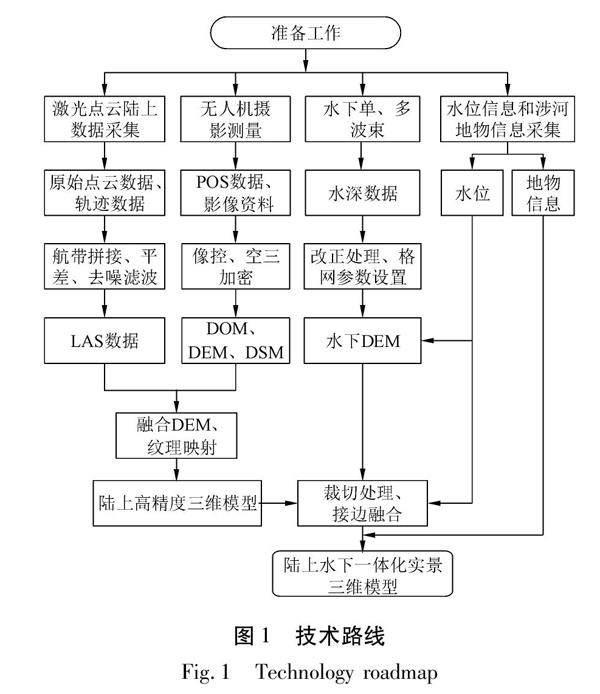
技术路线图如图1所示:
(1) 前期准备工作。包括确定监测范围与要求等,准备所需测量仪器设备;水下计划线,船只与测深设备准备;无人机空域申请,像控布设等多项工作。
(2) 数据采集。摄影测量获取区域地物地貌特征、河道水体边界,通过区域特点规划水下数据采集方法,确定测船选择和单波束、多波束设备,通过水体边界确定水下测量范围并施测水下地形;机载激光雷达获取区域陆上三维信息;通过验潮和无验潮模式采集水位信息;通过调绘采集涉河地物资料。
(3) 数据处理与输出。处理各类数据后,检验数据精度,将水下、水边线、陆上等多源数据融合。水下数据以单波束、多波束测深数据为主,水体边界线数据采用摄影测量平面信息和激光点云高程信息。陆上地形采用影像密集匹配点云和三维激光点云融合的方式构建高精度DEM,并生成陆上水下一体化三维模型。到此步骤可进行河道冲淤量等数据计算分析工作;再加工生成河道实景mesh模型,便于成果展示、应用和存储。
1.3 关键技术
(1) 利用摄影测量技术航飞测区,通过DJI Terra软件快速处理生成免相控初步影像,利用EPS软件快速绘制初步水体边界线,提供给无人船岸线信息,辅助规划航线,实现无人船水下测量自动化。同时搭配测船单波束、多波束等水下测量手段,协同工作。水下测量时按范围同步推进机载激光雷达测量,提高数据时效性。
(2) 水体边界线通过断面水位信息确定逐点水位高程,利用点云数据按高程裁切获取水边点并连成线,或通过正射影像利用EPS软件矢量化、修正提高水体边界线平面精度;LiDAR360输出点云模型,进行滤波[7],通过Context Capture平台融合无人机DSM和点云模型,构建陆上三维模型,利用高精度的水体边界线裁切和修复模型,过滤掉水下和近岸噪点;水下部分采用水下高程点和等深线相结合的方法,通过GIS软件融合水体边界线构建水下DEM。融合陆上模型、水下高程模型和水体边界线生成河道DEM。利用Context Capture、重建大师等软件,通过曲面重建算法等对模型进行重建优化,生成河道mesh模型,构建数字孪生河道数据底板,并进行其他分析工作。
2 试验分析
2.1 试验简介
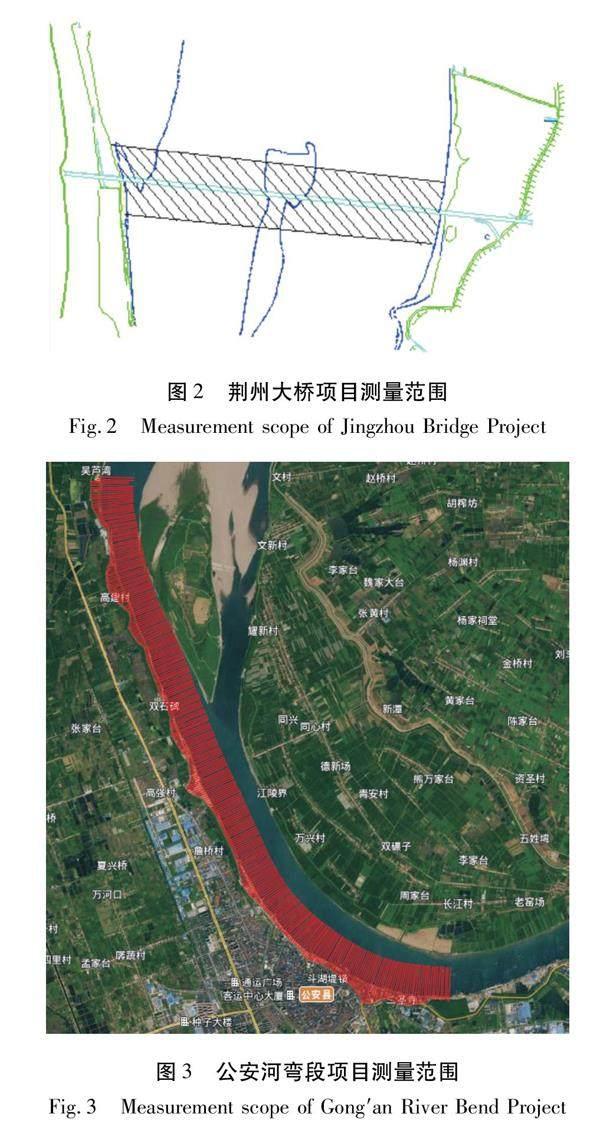
本文以长江中下游地区荆州长江公路大桥桥墩 1∶500水下地形测量项目(以下简称“荆州大桥项目”)和长江上公安河弯段1∶2 000河道地形观测项目(以下简称“公安河弯段项目”)为依托,开展河道监测。荆州大桥项目监测范围为大桥桥轴线上、下游各100 m,在两岸至测时水边所属范围内进行1∶500水下地形测量(图2)。公安河弯段项目施测长度11.8 km,水下由平滩水位测至江心方向550 m;陆上地形从平滩水位测至大堤方向50 m(图3)。
所选择试验区具有一定的特殊性和典型性,荆州大桥项目试验区域为1∶500大比例尺地形,大桥在航飞限高区域内,桥梁主塔高度为100~110 m,桥梁附近水域情况复杂,来往船只多,河道中央沙滩淤积,桥墩附近水下监测困难;公安河弯段项目陆上有树林和洲滩地貌,符合大部分河道冲淤监测项目的环境情况。同时本文将试验与传统测量手段进行对比分析,旨在反映实际监测能力、效率和质量情况,验证本文监测技术方案的可行性。
为了保证监测数据的质量和监测效率,充分考虑监测区域实际情况,陆上地形测量采用大疆精灵4 RTK 和飞马D2000无人机进行低空正射摄影测量,增加布设像控点检验以利于提升精度,按照成图比例尺进行航线规划;采用飞马D-LiDAR 2000激光雷达模块和DJI M300无人机搭载LiAir VH2激光雷达模块获取陆上范围三维点云数据,按照机载激光雷达数据获取技术规范要求获取数据。
水下地形测量按照相关规范和专业技术设计书要求布置断面线,设置断面线间距和测点间距。荆州大桥项目考虑桥墩的影响,使用传统测船为载体,HY1601测深仪与无人船搭载单波束测深仪相结合的测量方法,使用GNSS三维水道观测技术实时获取河底三维信息;公安河弯段项目使用传统测船HY1601测深,结合水位控制测量河底数据。
水边水位控制按照规范要求进行有/无验潮模式测量。荆州大桥项目使用无验潮模式获取水位,并进行水位站验潮模式比对。公安河弯段项目使用验潮模式,在等级控制点上采用全站仪光电测距三角高程方法接测。
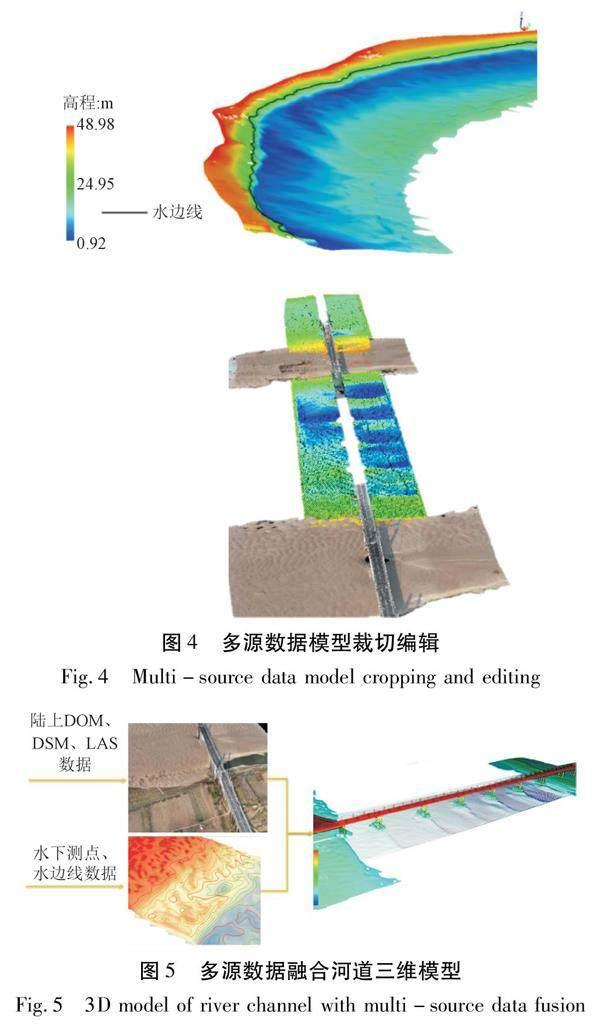
在三维模型构建过程中,陆上正射影像、LAS数据输出和水下DEM生成生产严格按照相关技术规范执行,注意各源数据的融合转换参数设置,DEM格网间距设置等问题。融合无人机航测DOM、DSM和机载激光点云数据生成陆上三维模型[6];融合水下测点和水边线数据,生成水下三维模型;对陆上和水下模型进行编辑裁切(图4),融合生成陆上水下一体化三维模型(图5),进行DEM输出和重构mesh模型(图6)输出等。
2.2 试验分析
为了验证本文河道冲淤监测技术的可靠性,在同一试验区进行了传统以接触式测量为主的河道监测,水下采用GNSS RTK+HY1601测量模式,陆上采用GNSS RTK人工测量方法。以传统方案测量数据作为真值,在三维模型上获取最近点三维坐标。通过精度对比,验证三维模型的精度。
2.2.1 三维模型陆上部分平面精度
通过测区地物特征点如建筑物、护坡岸线等比较三维模型陆上部分平面精度,分析三维模型平面纹理信息融合的精度。表1为三维模型与传统测量测点平面较差精度统计。由表1可知,荆州大桥项目和公安河弯段项目三维模型陆上部分平面精度高,能够满足大比例尺冲淤监测项目要求,最大值为0.393 m,精度情况明显优于规范对地形图地物点平面位置允许中误差的要求。
2.2.2 三维模型陆上部分高程精度
考虑点云数据获取原理,通过测区实测高程点分类比较融合后的三维模型陆上部分高程精度。表2为三维模型与实测点高程对比误差统计。荆州大桥项目三维模型陆上部分的高程精度情况表现好,误差最大值为0.210 m。公安河弯段三维模型陆上部分精度能够满足规范要求,低密度植被覆盖的区域有94.2%的点误差在0.25 m以内;高密度植被覆盖的区域有82.91%的点误差在0.25 m以内,有少数点误差较大,误差最大值为0.472 m。
2.2.3 三维模型水下部分和水体边界线精度
水下未进行多波束测量,仅有单波束测量水深数据,水下三维模型的精度取决于水下数据采集的密度、数据处理构建DEM时格网间距大小和构建参数的设置,因此按照不同比例尺尽可能提高数据采集密度,设置小的格网间距来提高水下模型精度。
水体边界线是三维模型融合精度的重要影响因素,对三维模型的裁切和水陆模型边界拼接影响大,需要验证精度。水体边界线平面位置精度通过无人机正射影像验证;在无人船等无验潮模式下水位高为推算值,需进行GNSS三维水道观测技术验证。此次利用荆州大桥项目水下数据进行GNSS三维水道观测技术系统检核与精度评价,验证评价GNSS三维水深测量成果的精度和可靠性,同时也间接验证无验潮模式推算的水位高程正确性。在测量前,将流动站架设到与参考站距离为2 km的等级控制点上进行比测检核,平面坐标互差为0.046 m,高程互差为0.036 m,精度满足规范要求。同时采用附近水文站检核,对水位进行高程控制,测量部分区域水深,经过数据处理,比对相同测点的水深。图7为无验潮与验潮水深对比误差分布图,水深对比误差不大于0.10 m的点数占对比总点数的91%,水深对比误差不大于0.20 m的点数占对比总点数的100%,满足SL-2017《水道观测规范》中误差小于或等于0.10 m的点数占对比总点数的80%;误差小于或等于0.20 m的点数占对比总点数的95%的要求。
2.2.4 河道冲淤分析
目前,河道沖淤量计算方法主要有断面地形法、输沙平衡法和基于数字高程模型的网格地形法。此次通过荆州大桥项目和公安河弯段项目多源数据融合构建的河道三维模型与上一年测次传统测量获得数据生成的三维模型对比,采用网格地形法进行河道冲淤计算。图8为荆州大桥项目河道三维模型计算冲淤厚度分布,图9为公安河弯段项目河道三维模型计算冲淤厚度分布。
河道冲淤分析是一个多测次数据汇总、计算、分析的过程。需要对多源数据融合的河道冲淤监测技术下生产的多测次数据进行计算验证,对同一套底板进行数据分析,体现出与传统测量方案的精度优劣,本文将不对融合的三维模型冲淤计算精度继续论证。
3 方案评价与探讨
在项目应用中,通过监测和数据处理时间、生产成本等方面统计来反映基于多源数据融合的河道冲淤监测技术方案效率情况。表3为试验项目中本文监测技术方案应用能力分析统计。
本文监测技术方案在项目实际应用中能达到预期效果,监测范围广泛,监测效率高,时效性强,提升了河道冲淤监测的时间、空间分辨率。对比传统测量方案,相同工作量下,在监测和数据处理时间、生产成本等方面优于传统方案。相比较传统测量方案,多源数据融合的河道冲淤监测技术方案生产成果数据时间总体减少了38.5%,两个项目生产效能均有提高,人力、设备等相对投入分别降低了20%和22%。
河道冲淤监测涵盖面广,陆上和水下地形情况复杂,在实际应用中有待进一步改进和论证。通过试验分析可以直观发现,以陆上地形为主的测区,本方案监测能力表现更好,生产效率提升明显,数据融合进行三维模型分析能力更强;以水下地形为主的三维模型分析,受测量方法限制,生产效率提升不明显。
本文研究的河道冲淤监测技术方案表现为多源数据支撑,高精度数据采集模式,海量点数据生成三维模型,但仍存在部分监测区域难以实施的情况,如浅滩水下地形,高密度植被区域等;存在测区地物地貌信息获取不全情况,如水下地物、陆上部分特殊地物、地物侧面纹理信息等,影响冲淤分析判断。在数据融合构建三维模型时,需要综合GIS、BIM[8-9]等平台,通过一个更高效的服务平台搭建,支撑海量数据输入输出、格式转化、水上水下一体融合、编辑处理等,还可利用其他河道水文资料,河床成分、泥沙分析等,提供整套体系解决方案,促进河道冲淤分析能力建设、河道数字化发展。
4 结 论
本文提出的通过航空摄影测量、机载激光LiDAR、无人船单波束与多波束等河道测量技术手段,生产多源数据,融合构建三维模型,进而计算分析河道冲淤的技术方案,通过荆州大桥项目和公安河弯段项目,将该方案与传统测量方案精度进行对比试验论证,结果表明:① 该技术方案精度能够满足大比例尺河道冲淤监测项目要求,构建的三维模型能提升监测数据整体质量;② 三维模型平面精度高,在陆上三维模型高程精度方面,低密度植被覆盖的区域有94.2%的点误差在0.25 m以内,高密度植被覆盖的区域有82.91%的点误差在0.25 m以内;③ 该方案可提升河道冲淤监测项目陆上地形数据和水体边界数据采集效率,项目监测效率整体提升20%以上。此次项目试验表明,水下数据监测和模型在精度方面还需继续提升。遇到环境复杂的水下区域,或者高密度植被覆盖的陆上区域等情况尚不能完成高精度要素采集[5],还需其他测量方法辅助。三维模型冲淤计算的精度评价还需要多测次数据继续论证。
本文监测技术方案具有一定可行性,在大部分测区可平替传统测量方案,提高监测效率。针对本文监测技术方案的建议和后续考虑如下:
(1) 项目测区陆上在沙滩地形或草地、滩等低密度植被类型地形区域,三维模型精度高,在植被密度高的部分区域,需要结合人工测量对比论证再使用。
(2) 测区情况复杂,需要综合传统测量手段,优势互补提高精度和效率。
(3) 三维模型融合数据的建立要考虑水边线的重要性,判断并过滤陆上三维模型在水边附近的错误数据,如点云方面的水面点和浅水点数据;冲淤分析时需要建立同精度的三维DEM模型,避免系统误差。
(4) 后续可尝试利用多波束获取水下数据,构建高精度三维模型;编辑算法进行水体边界线自动提取;利用倾斜影像融合三维模型进一步修模,丰富模型纹理信息,提高三维模型精度;进行河道mesh模型的二次开发。
参考文献:
[1]许全喜,董炳江,张为.2020年长江中下游干流河道冲淤变化特点及分析[J].人民长江,2021,52 (12):1-8.
[2]夏祖伟,荣利会.融合雷达点云与正射影像的河湖划界技术研究[J].人民珠江,2020,41(10):109-114.
[3]HUJEBRI B,EBRAHIMIKIA M,ENAYATI H.Automatic building extraction from lidar point cloud data in the fusion of orthoimage.isprs[J].International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2019:541-546.
[4]SECORD J,ZAKHOR A.Tree Detection in Aerial LiDAR and Image Data [C]∥IEEE.IEEE International Conference on Image Proceesing.Atlanta:IEEE,2006:2317-2320.
[5]LIU Y.Application of multi-source data fusion method in updating topography and estimating sedimentation of the reservoir[J].Water,2020:3057-3057.
[6]馬随阳,谢齐,余永周.基于无人机影像与三维激光数据融合的桥梁三维建模方法研究[J].中国水运.航道科技,2021(5):70-73.
[7]万年锋,袁启伦,邸国辉,等.基于无人机LiDAR数据的陡崖反坡滤波技术及应用[J].水利水电快报,2023,44(5):45-49.
[8]张晓庆.多源数据采集的水上水下一体化河道三维场景构建[D].郑州:郑州大学,2020.
[9]邹娟茹,孙兴华.多源数据融合构建精细三维模型的关键技术[J].地理空间信息,2021,19(12):131-134,137.
(编辑:李 慧)
River scouring and silting monitoring technology based on multi-source data fusion
LIU Xiaojie,HE Lushan,ZHOU Rufu
(Jingjiang Hydrological and Water Resources Survey Bureau,Bureau of Hydrology,Changjiang Water Resources Commission,Jingzhou 434000,China)
Abstract: The river channel environment is complex,so single measurement method and the silo data can no longer meet the digital development of the river channel in land and underwater topographic surveys.A monitoring technology program based on multi-unmanned intelligent system was proposed to collect river channel data collaboratively,which was integrated to construct three-dimensional model,calculated and analyzed the amount of siltation.A project of siltation monitoring of Jingzhou Yangtze River Bridge and a test of topographic observation project of the river channel in the bend section of the Gongan River were carried out.The results showed that the accuracy of this technical solution can meet the requirements of large-scale river siltation monitoring project,and the constructed 3D model can improve the overall quality of monitoring data.The planar accuracy of the 3D model was high.In terms of the elevation accuracy of the land-based 3D model,94.2% of the points of the area covered by low-density vegetation had an error of 0.25 meter or less,and 82.91% of the points of the area covered by high-density vegetation had an error of 0.25 meter or less.The overall monitoring efficiency of the project was improved by more than 20%.Compared with the traditional operation mode,this technical program had a richer data product forms,which can significantly improve the monitoring quality and efficiency,and is highly feasible in most of the river gauging areas.
Key words: river erosion and siltation monitoring; multi-source data; large scale; three-dimensional model; Jingjiang River section
收稿日期: 2023-08-07
基金項目:国家重点研发计划项目(2022YFC3201801)
作者简介:刘小杰,男,主要从事水文河道测绘工作。E-mail:m18871570857@sina.com
猜你喜欢
求知导刊(2016年36期)2017-03-03 01:51:13
电脑知识与技术(2016年28期)2016-12-21 12:44:21
科技创新与应用(2016年33期)2016-12-17 12:31:48
电脑知识与技术(2016年26期)2016-11-24 17:06:13
考试周刊(2016年49期)2016-07-05 09:14:41
科技视界(2016年13期)2016-06-13 08:13:41
中国教育信息化·基础教育(2016年3期)2016-06-07 10:47:48
中国市场(2016年7期)2016-03-07 09:18:43
科技视界(2016年4期)2016-02-22 12:45:32
科技资讯(2015年19期)2015-10-09 19:31:12
