基于多传感器融合的智能分拣搬运车
2024-05-12 11:28:10赵恩波于家旺王晓鹏曲强
电子产品世界 2024年1期
赵恩波 于家旺 王晓鹏 曲强

摘要:设计了一款能够自动识别和搬运货物的机器人,该装置主要利用点位图来确定货物的位置,通过路 径规划来寻找最短搬运路径。在运动过程中,采用编码器测量车轮转动的速度、陀螺仪二重积分测量小车 3 个方向的加速度、光流测量小车相对于环境的运动速度,最终通过卡尔曼滤波对这 3 个数据进行融合,实 现对该装置位置信息的实时获取。识别方面采用 TensorFlow 深度学习框架对识别的对象进行分类,该模型 利用卷积神经网络和注意力机制,提高了识别的准确性和速度。
关键词:多传感器融合;自动识别;卷积神经网络
中图分类号:TP242.2 文献标识码:A
0 引言
随着工业化和信息化的发展,智能分拣搬运车 在物流、制造、仓储等领域的应用越来越广泛。智 能分拣搬运车是一种能够自主识别、抓取、运输和 放置不同物品的机器人,其可以提高生产效率、降 低人力成本、减少人为错误和安全风险。智能分拣 搬运车的关键是将摄像机头、激光雷达、超声等感 应器的数据进行有效整合,从而准确地识别出周围 的环境及物体,并对其进行有效定位。本文基于机 器视觉技术,结合 OpenCV 视觉库和 TensorFlow 深度学习框架,设计并实现了视觉引导分拣搬运作 业解决方案 [1]。
1 产品结构、组成与基本功能
1.1 装置结构与组成
该装置是基于多传感器融合的智能分拣搬运 车,其组成结构为小车底盘、机械臂,货物分拣仓 机械机构如图 1 所示。
1.2 基本功能
1.2.1 已知货物位置情况下搬运分拣货物
智能分拣搬运车能够自主达到物品附近,对需 要搬运的物品进行拾取和搬运,完成之后,可以 自动回库等待下一次任务。智能分拣搬运车的车身 搭载串口 Wi-Fi 模块,可以使用语音控制其到某一 位置进行搬运。识别分拣过程中,若货物搬运结 束,可使用语音指挥分拣搬运车完成最后的任务并 回库。
1.2.2 自动避障功能
运动过程中智能分拣搬运车如果遇到一些障碍 物,会自动停止,并尝试绕过障碍物,以免车身与 障碍物发生碰撞。
2 产品设计
2.1 点位图识别
装置出发之前,有两种确定货物位置信息的 方案:一是为其提供货物点位图,其点位图不一 定为精准坐标,大致坐标即可;二是通过电脑麦 克风使用语音控制小车到货物附近,实现自动分 拣搬运。
智能分拣搬运车正上方搭载一个 OpenArt Mini 進行点位图识别,其旁边有 LED 灯带进行补 光,从而提高摄像头识别的准确率。代码逻辑为 搜索黑色矩形框,在矩形框内寻找黑色圆点,并 求出黑色圆点到直线的距离,最终求出各个点的 位置坐标。
2.2 路径规划与速度规划
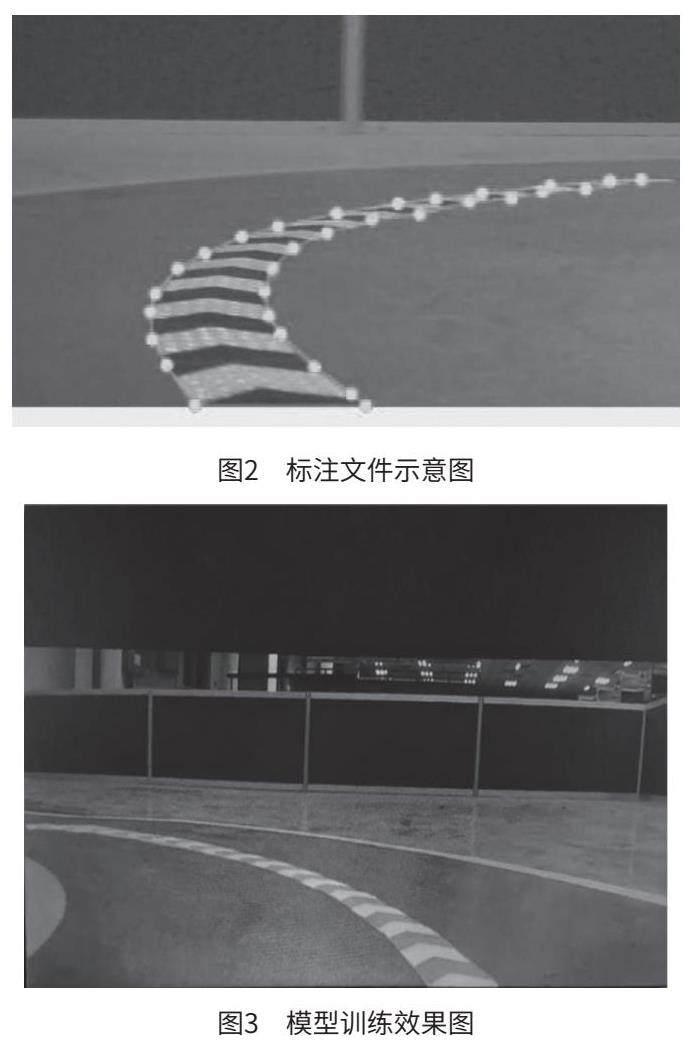
采用深度体感摄像头三维 RGBD 相机,其不仅 可以传输视频,还能进行深度学习。如图 2 所示, 以识别车道线为例,首先使用摄像头拍摄一段车道 线的视频,然后通过 OpenCV 将视频每帧裁剪成一 张照片,从而形成图片数据库。
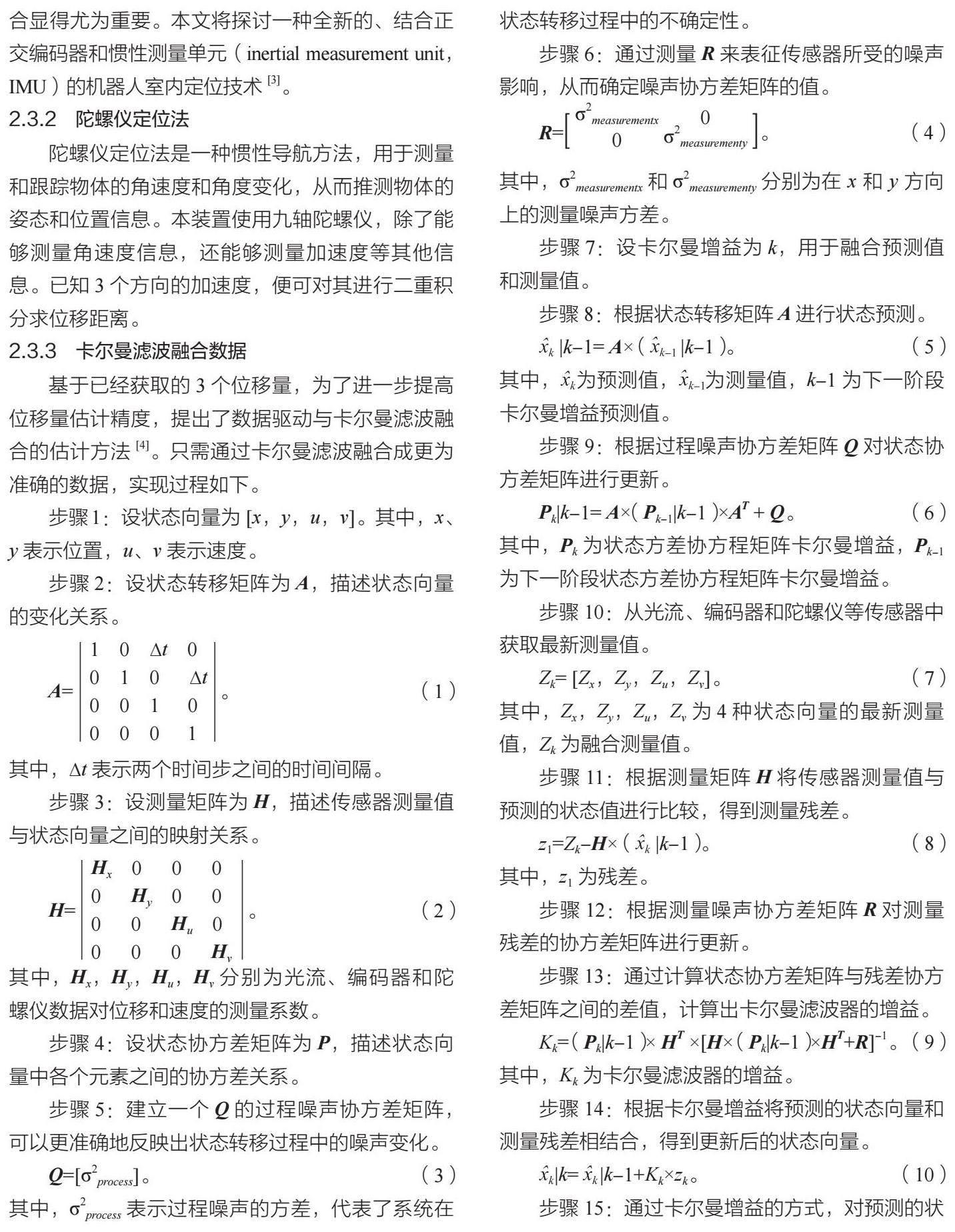
UNet 编码—解码网络结构可以有效提取图像的 特征信息 [2],并利用这些特征信息构建高效的模 型。将原始图像以及相关的标记信息输入 UNet,以便更好地实现对图像的识别。UNet 是一种常用 于图像分割任务的深度学习架构,其第一个主要功 能是对数据进行特征抽象,而第二个主要功能是对 数据进行采集。通过神经网络训练得到的模型训练 效果图如图 3 所示。
2.3 多数据融合
2.3.1 编码器定位法
编码器定位法是一种常用的位置估计方法,主 要用于测量旋转或线性运动的位移和位置。这种设 备使用正交编码器,其基于传统的定位算法,但没 有考虑编码器的运行路径信息。因此,设备模拟精 确性不佳。当机器人处于静止状态并进行旋转运动 时,随着运行速率的增加,其精确性会下降。由于 麦克纳姆轮的特性,在实际应用过程中会出现打滑 的现象,从而造成定位不准,所以多传感器数据融合显得尤为重要。本文将探讨一种全新的、结合正 交编码器和惯性测量单元(inertial measurement unit, IMU)的机器人室内定位技术 [3]。
2.3.2 陀螺仪定位法
陀螺仪定位法是一种惯性导航方法,用于测量 和跟踪物体的角速度和角度变化,从而推测物体的 姿态和位置信息。本装置使用九轴陀螺仪,除了能 够测量角速度信息,还能够测量加速度等其他信 息。已知 3 个方向的加速度,便可对其进行二重积 分求位移距离。
2.3.3 卡尔曼滤波融合数据
基于已经获取的 3 个位移量,为了进一步提高 位移量估计精度,提出了数据驱动与卡尔曼滤波融 合的估计方法 [4]。只需通过卡尔曼滤波融合成更为 准确的数据,实现过程如下。
步骤1:设状态向量为 [x,y,u,v]。其中,x、 y 表示位置,u、v 表示速度。
步骤 2:设状态转移矩阵为 A,描述状态向量 的变化关系。
步骤 15:通过卡尔曼增益的方式,对预测的状态协方差矩阵进行有效的改变和调整。
其中,Pc 为修改后的状态协方差矩阵,I 为单位 矩阵。
步骤 16:重复执行步骤 8 ~ 15,融合每个时 间步的光流、编码器和陀螺仪数据,得到融合后的 位移和速度估计结果。
将数据采集之后换算成位移距离导入 MATLAB, 并对其数据进行融合。
2.4 货物分拣
智能分拣搬运车搭载一个可旋转的储物仓,为 了任务运行得更流畅,搬运货物均为卡片,储物 仓放置卡片较为便利,后续如需装载其他货物,可 以增加储物仓的面积。将所有货物收集到储物仓 中,便开始进入分类环节。本次任务设定 5 个分类 区,分别为整体区域的上、下、左、右和车载。储 物仓中搭载电磁铁,可以控制储物门的开关,一旦 到达分类区域,打开储物门即可将货物放到指定 区域。
3 结语
人工智能、物联网和“工业 4.0”的出现,引 发了一场颠覆性的变革,《中国制造 2025》的推出, 使得智能电子控制在物流行业的普及更加迅速,其 不仅改变了原有的搬运、分拣、装配过程 [5],而且 还极大地提升了整个行业的效率和质量。多传感器 融合是一个复杂的问题,涉及传感器的选择、校 准、配准、数据融合、状态估计等多个方面,需要 综合考虑传感器的性能、成本、可靠性等因素。本 文旨在研究基于多传感器融合的智能分拣搬运车的 设计与实现,探索适用于不同场景和任务的多传感 器融合方案,提高智能分拣搬运车的感知和控制 能力。
参考文献
[1] 龙健宁 . 基于机器视觉的智能物流分拣搬运系统的研 究与应用 [D]. 广州:华南理工大学,2021.
[2] 刘惠中,邓富龙,刘茜茜,等 . 基于 Res-UNet 算 法的螺旋溜槽精矿带识别分割方法研究 [J]. 有色金属 (选矿部分),2024(2):70-80.
[3] 胡天林,陈志伟,赵德博,等 . 基于编码器与惯性 测量单元的定位系统设计 [J]. 实验室研究与探索, 2022,41(5):83-87,284.
[4] 李德俊 . 基于数据驱动与卡尔曼滤波融合的动力电 池 SOC 估计方法研究 [D]. 芜湖:安徽工程大学, 2023.
[5] 张林 . 基于 51 单片机的智能分拣搬送系统设计 [J]. 江苏通信,2021,37(4):126-128.
猜你喜欢
中国自动识别技术(2023年6期)2024-01-12 08:13:22
水上消防(2019年3期)2019-08-20 05:46:08
特别健康(2018年3期)2018-07-04 00:40:18
科技创新与应用(2016年35期)2017-02-21 19:16:50
计算机应用(2016年12期)2017-01-13 20:26:21
软件导刊(2016年9期)2016-11-07 22:20:49
软件工程(2016年8期)2016-10-25 15:47:34
发明与创新(2016年26期)2016-08-22 03:23:28
电脑知识与技术(2016年10期)2016-06-16 21:27:26
电测与仪表(2016年6期)2016-04-11 12:06:38