
机载时间敏感网络链路安全关键度均衡调度方法
2024-05-07 07:59赵长啸戴骏董方正李道俊
航空学报 2024年6期
赵长啸,戴骏,董方正,李道俊
1.中国民航大学 安全科学与工程学院,天津 300300
2.民航航空器适航审定技术重点实验室,天津 300300
综合化是航空电子系统的发展方向,综合模块化航电(Integrated Modular Avionics System,IMA)已在B787、A380 等大型客机上成功应用。随着对IMA 航电系统故障封闭、系统重构、分区调度任务分配等[1-3]研究的逐步深入,为优化IMA 架构,研究者们后续提出了分布式综合模块化航电(Distributed Integrated Modular Avionics System,DIMA)架构[4-5]。DIMA 综合了分立式IMA 与集中式IMA 的优点[6],被视为未来航电系统的发展方向,DIMA 中所有模块相连并且提供高容错,因此对航电系统中确定性、实时性需求的保证能力要求更高。现应用于IMA 中的机载网络(Avionics Full Duplex Ethernet,AFDX)是基于以太网的事件触发(Event-Trigger)网络,在实时性、确定性等方面难以满足DIMA 需求[7]。支持时间触发(Time-Trigger,TT)技术的通信网络开始受到机载系统领域的关注[8-9]。洛克希德·马丁公司与空客集团研发的奥赖恩(Orion)飞船[10],以及NASA 的门户空间站(Lunar Gateway)均运用了支持时间触发的通信网络。由IEEE(Institute of Electrical and Electronics Engineers)推出的时间敏感网络(Time Sensitive Network,TSN)是支持TT 技术的新一代机载网络的候选者之一[11-12]。与同样支持TT技术的TTE[8,13-14]相比,TSN 技术具有配置更加灵活、可按需预留带宽、可更好支持不同类型的流量等优点。NASA 的星载链路项目已启动了对TSN 技术的研究,SAE 中的AS-1A 工作组也在寻求与TSN 工作组联合,制定航空航天领域的TSN 应用标准[15]。
机载网络作为支持航电系统运行的基础网络,首先需要解决传输任务的可调度性,其次需要满足航电功能的实时性需求。众多研究[16-18]表明,时间触发通信的路由与调度问题可以转换为一个NP 问题。何锋等[19]针对机载时间触发以太网中时间触发(TT)通信调度给出了多种约束引导下的调度模型,并形成了基于强化学 习(Reinforcement Learning,RL)的调度方法,对调度数量、消息延迟进行了优化。Raagaard 等[20]使用混合整数规划(Mixed Integer Programming,MLP)为TT 流量提供调度方法、最小化TT 队列数与时延。Dürr 等[21]利用禁忌搜索(Tabu Search)与Heuristic(贪心算法)复合方法优化总传输时长。Li 等[22]使用基于可满足性模理论(Satisfiability Modulo Theories,SMT)得到时间触发通信调度方法,优化了调度速度。Vlk 等[23]开发了一种高效的调度方法EPIC,优化了调度数量与调度速度。Álvarez等[24]提出的主动传播复制帧(Proactive Transmission of Replicated Frames)机制允许临时错误链接,提高了TSN 网络通信安全性。Ali等[25]提出容错瓶颈启发式算法,在车载网络中使用可靠帧复制和消除(Frame Replication and Elimination for Reliability)提升TSN 流量传输安全性。但是,由于不同的航电系统保证飞机安全性的能力不同,现有的仅关注任务流量属性的调度方式,很容易引起风险汇集,使某条链路失效,进而可能导致多个安全关键功能失效,在最坏情况下甚至会发生机毁人亡的灾难性事故。
机载网络可分为总线式网络和交换式网络,对总线式网络(1553B、ARINC429 等)而言,其网络的结构决定了不同终端进行任务传输时可共享的物理网络资源仅有主干总线,无法为传输任务分配网络资源。当主干总线发生链路失效,接入总线的各端系统共享的网络资源均会受到影响,所以总线式网络并没有链路失效风险集中的问题。在以AFDX 为代表的事件触发型交换式机载网络中,由于其采用交换式结构,任务传输时的可选网络(链路)资源较多。在网络机制上AFDX 支持虚拟链路(Virtual Link,VL)技术,AFDX 通过为不同的VL 分配时隙,模拟端到端的逻辑连接。针对AFDX 链路失效的相关研究有:基于VL 对AFDX 进行链路风险均衡的RBPP 算法[26]、考虑链路失效的AFDX 动态故障树可靠性分析[27]、利用新型的冗余拓扑结构降低链路失效等风险[28]。而在时间触发的机载交换式网络TSN 中,由于时间触发技术是依靠占用时隙实现的,所以它与AFDX 缓解链路风险集中的具体实现手段是有所区别的。
时间敏感网络中的时间触发流量相较于事件触发流量有着更好的实时性与确定性,时间触发流量实现高确定性与实时性的基础是提前对时间触发传输任务提供确定的传输路径和传输偏移规划。但在机载网络的背景下,任务支持功能的安全关键程度不同,任务的安全关键程度也有所差异。在进行任务传输路径规划时,网络中某(些)链路相较于其他链路所承载的安全关键任务更多或承载的任务安全关键程度更高(即此链路对于网络的安全关键程度高),则会造成风险汇集,这些链路失效时其承载的任务会对飞机造成更大影响。基于此,本研究通过在机载时间敏感网络任务调度的过程中对任务传输路径与传输偏移进行约束与优化,缓解链路的风险汇集现象。
本文提出了机载TSN 安全关键度均衡的调度方法,提供了机载网络中链路安全关键度的量化模型,建立机载TSN 安全关键度均衡调度模型,并基于约束规划的方法求解调度结果,利用仿真实验对调度方法进行分析。针对机载时间敏感网络中多数据混传可能导致的风险汇集问题,综合考虑机载网络中数据传输的的实时性与安全性需求,提出了一种链路安全关键度均衡的调度方法。基于专家评价和熵权法量化系统任务安全关键度,通过任务映射表征链路安全关键度,构建机载TSN 链路安全关键度均衡的调度模型;基于配合约束规划的方法构建链路安全关键度均衡(Link Safety Criticality Balancing,LSCB)调度方法,在任务数分别为50 和100 的场景中LSCB 调度方法对于链路安全关键度的均衡作用相较于LB 方法和SP 方法均有所提升,表明LSCB 在保证任务传输延迟上界的基础上,可有效缓解风险汇集。
1 问题描述
目前在民用飞机领域,系统安全性设计与评估主要基于SAE ARP4754 标准,该标准针对不同功能失效对飞机的安全性影响定义了5 类不同的失效状态:Ⅰ类(灾难级)、Ⅱ类(危险级)、Ⅲ类(较大的)、Ⅳ类(较小的)、Ⅴ类(无安全性影响)。不同航电功能对飞机的安全飞行能力保障不同[29],其关联的失效状态类别和数量也存在较大差异,如航电核心系统支撑了多个航电功能的处理与传输任务,其失效直接影响飞行安全。某型客机的功能危害性评估清单中,航电核心处理系统涉及21 个Ⅰ类失效状态,5 个Ⅱ类失效状态,8个Ⅲ类失效状态,而同机型中客舱的娱乐系统不涉及Ⅳ类以上的失效状态。机载互联系统是支撑这些航电系统运行的数据与指令通路,在429、1553 等总线型网络中,不同航电任务在其传输时间内对网络传输介质具有独占性,而机载TSN 网络为交换式网络时,多航电任务共享传输介质,会导致不同功能的不同安全关键任务在网络中混合传输,可能使某些链路风险汇集。如果在任务链路规划时不考虑任务的安全关键程度,极易导致某条链路上承载多个高安全关键等级的任务,一旦该链路失效,极端情况下甚至会产生导致机毁人亡的Ⅰ类失效状态。如某型民机航电系统中,完全丧失通信系统或完全丧失导航系统均属III 类失效状态,但是同时丧失通信系统和导航系统则属于Ⅰ类失效状态,如图1 所示。图1包含3 个交换机(SW)与6 个端系统(ES);任务F1、F2、F3分属通信功能、导航功能、客舱娱乐功能,其传输路径以不同线型的虚线体现。在SW1与SW3 之间的链路为LS1,S3,由红色 线表示,它 同时承载了任务F1和F2,造成了风险的汇集。如果链路LS1,S3发生失效,就会引起通信功能、导航功能的故障甚至失效,导致无法接受的后果[30]。Yang 等[31]结合广义随机petri 网(GSPN)分析了航电系统安全性,并对AFDX 机载网络等部分进行了深入分析,在AFDX 中网络双通道失效是可能导致IMA 架构失效的条件之一。其中链路失效是导致网络通道失效的原因之一。从各航电功能角度来说,当链路失效时,其上的所有传输任务均受影响,可能的失效状态包括功能的全部或部分丧失。对机载网络而言,风险汇集是设计和分析中应重点关注的问题。本文提出了机载时间敏感网络链路安全关键度均衡调度方法以缓解风险汇集现象。

图1 示例网络拓扑Fig.1 Sample network topology
目前应用较多的交换式机载网络AFDX 中,其路径选择是以VL 技术为基础的,VL 技术利用网络时隙模拟逻辑上的端到端链接,即任务的路径由其发送终端与接收终端所定义的VL 决定,设计了VL 就决定了各传输任务的发送路径。但在时间敏感网络中,以IEEE 802.1Q 标准(原为802.1Qbv,后全部并入802.1Q)中定义的时间感知整形器(Time-Aware Shaper,TAS)为基础,TAS 机制中门控列表(Gate Control List,GCL)控制交换机上的各队列的GATE,使确定的数据帧通过,网络中各交换机的GCL 需要基于TSN调度结果生成。TSN 的调度便是基于此机制,通过在一个调度周期(超周期)内调度,使任务规划能够满足资源等约束,得到调度结果(各任务的传输偏移与传输路径)生成,同样发送、接收终端的各任务的传输路径可以不同。本文方法基于TAS 机制进行时间敏感任务的调度,在实验中主要关注满足各约束基础上调度方法对于链路风险集中的缓解情况。
2 机载TSN 安全关键度均衡调度模型
2.1 系统模型
TSN 网络模型包括节点集N与链路集L,节点集合N包含网络中所有的交换机(Switch)与终端(End System),n为节点数目,链接集L包含网络中所有节点间的直接链接。Ni为单个节点,布尔变量Li,j为网络拓扑中节点Ni与节点Nj是否存在直接链接,当Li,j=1 时表示Ni与Nj存在直接链接,为零时则相反。TSN 节点间为全双工,所以对于任意2 个相连的节点Ni和Nj,有Li,j=1=Lj,i∈L。对于每个链接集L中的链路Li,j有以下相关参数:δi,j为链路Li,j上的传播延迟;εi为Ni节点交换机的结构切换延迟;网络中的所有节点时钟同步,设d为设备间的时钟之间的最大差值。
任务定义为从一个终端到另一终端的周期性的数据传输,F为所有任务的集合。对于F中任意一个任务Fk(k为任务编号):数据由网络的发送端Dk传输至网络的接收端Rk(由任务自带的属性决定,Dk、Rk对应网络中的节点);任务Fk的传输持续时间为ηk(表示任务Fk从任何节点传输到其相邻节点所需的时间);任务Fk的周期为pk。任务Fk的安全关键度为wk。
2.2 安全关键度
为更好地评价风险汇集程度,引入功能、任务、链路的安全关键度,分别表示功能、任务、链路的安全关键程度。
2.2.1 任务安全关键度
目前较为成熟的民用飞机安全性设计与评估体系是根据SAE(Society of Automotive Engineers)组织发布的ARP4754[32]构建的。其中的系统级功能危险性评估(System Function Hazard Assessment,SFHA)确定可能的功能失效状态,根据失效状态影响的严重程度对其进行分类,并对由此产生的安全性需求进行确定。在初步系统安全性评估(Preliminary System Safety Assessment,PSSA)阶段将上层安全性需求(研制保证等级等)进行分配。
邀请n位专家依据评价表对m个功能进行评价,得到功能在p个方面的具体评价值之后,再引入客观赋权的熵权法[33]对各功能的评价指标的权重进行计算。
首先计算各位专家对u功能a方面的平均评价值,u为
式 中:qa,u,v为第v位专家对于u功能a维度的评价值(评价维度总数为p,功能总数为m)。
进一步可计算某一指标的信息熵值为
式中:ea为a维度的信息熵值。
继续可计算出各指标的权重wa为
则最终功能安全关键度gu为
在功能实现时,网络资源依赖各端系统之间进行任务通信,根据功能与端系统非对称依赖关系可建立功能-端系统依赖矩阵c(其中cu,i为u功能对端系统Ni的依赖关系),那么为实现某功能的端系统Ni(节点)的安全关键度zi为
对任务而言,依据其出发节点与接收节点(端系统),任务Fk的安全关键度wk可表示为
式中:Dk、Rk分别为任务Fk的发送端与接收端。
2.2.2 链路安全关键度
任务在机载TSN 中传输时会经规划好的路径由发送端向接收端按照固定周期传输数据帧,在此过程中,任务安全关键度会累积在流经的各链路上,将si,j作为链路Li,j上的安全关键度,H为度量链路安全关键度的时间范围,设总待调度任务数量为φ,则可将其表示为
2.3 链路安全关键度均衡调度方法
在处理不同周期的任务调度时,为保证调度的完整与正确,提出超周期(Hyper Period)概念,H=lcm{pk|Fk∈F},lcm 为最小公倍数函数,计算式中各任务周期pk的公倍数,pk、H取值为实数。将H作为一个调度周期,在此周期内将所有F中的传输任务调度完成,即一直循环下去,保证网络的正常传输。机载时间敏感网络的调度结果分为两部分:
1)用布尔变量rk,i,j表示任务Fk是否经过Li,j链路(布尔变量Boolean Variable 具有2 种逻辑状态的变量,包含2 个值:1 与0,当值为1 时表示任务Fk经过Li,j链路),即可将任务的传输路径进行表示;
2)变量tk,i表示任务Fk从节点Ni发送时,第1 次传输开始时的传输偏移,可对任务在网络中传输的状态在时间维度上进行表达。其取值范围为0 到周期长pk之间的整数。任务Fk第1 帧最终在到达接收端的时刻(rk,i,j=1,Nr=Rs)为:tk,r+ηk+δi,r+εi+d。其 中δi,j、εi、d分别为链路延迟、节点延迟与时间同步最大误差。任务调度的最终结果是为所有任务找到满足约束并使优化目标最大化的传输路径与其在路径各节点上的传输时刻(即传输偏移)。
2.3.1 任务路径相关约束
由于安全关键度是任务的一种属性,任务传输路径的选择就与其积累到链路上的安全关键度结果相关,设置如下的路径基础约束。
1)约束1:可选路径约束。
任务的传输是基于网络拓扑结构的,任务的传输路径只能在网络拓扑中已存在的链接中选择。即:当网络拓扑中两节点Ni与Nj间无直接链接时,任务路径不能直接由Ni到Nj,将其表示为
2)约束2:任务发送/接收约束。
在约束1 基础上继续分析,任务最基础的需求是将任务所包含的帧由发送节点发出且由接收节点接收。将此约束表示为
3)约束3:路径连续性约束。
为保障任务路径的正确与完整,加入以下限制:任务Fk的完整传输路径应由发送节点Sk在链接集L中链接首尾相接直至接收节点Rk;且在此传输过程中不能有环形链路出现,即同一任务的路径中经过同一节点数目不大于一次,表示为
2.3.2 任务传输偏移相关约束
任务的传输偏移是实现TT 任务在TSN 中基于TAS 机制进行门控的重要信息,需要保证其正确配置,利用约束规划的方法进行求解时需要以下对传输偏移的约束。
1)约束4:释放/截止约束
此约束对所有任务Fk∈F限制传输偏移进行基本的数值限定,此值应在相对释放时间与相对截止时间之间,进一步分析传输偏移的上限,每个任务均需满足相应的时延要求需要对接收节点的接收时间加入考虑,表示为
2)约束5:传输顺序约束。
由于TSN 交换机依据存储转发实现帧传输,为保证帧传输的连续性需要对任务Fk路径上的相邻两链路的传输偏移进行限定:
3)约束6:资源约束。
此约束的出发点为网络链路资源的有限性,某链路上同一时刻不能有帧之间的争抢,安排帧之间相错的角度处理此约束,即两任务若通过同一链路,在此链路上两任务的所有帧之间均需与对方相错,表示为
式中:Fk、Fs为可能通过同一链路的两任务;x与y为两任务之间相对的发送次数,由于在一个超周期内要发送数次,需要保证两任务的每次发送均无资源冲突。
4)约束7:帧隔离约束。
Vlk 等[34]和Craciunas 等[35]学者指出:若有帧在传输过程中丢失,那么分配给此帧的时隙可能由于TSN 队列的FIFO(First In First Out)属性,被TSN 交换机用于队列中其之后的帧传输,造成网络中TT 流量传输混乱,无法保证时间触发机制生效,如图2 所示。为避免此问题,加入帧隔离约束对发送至同一交换机接收端的2 个任务的传输偏移进行限制,对这2 个任务的帧进行隔离,表示为

图2 帧隔离约束示意图Fig.2 Diagram of frame isolation constraint
与式(11)相似,Fk,Fs为可能通过同一链路的两任务,x与y为两任务之间相对的发送次数,此约束也需要保证两任务在超周期内的每次传输时均进行了帧隔离措施。
2.3.3 安全关键度均衡
链路安全平均值计算式为
为了避免安全关键度集中,尽量平衡不同链路失效时对整个网络的影响,引入链路安全关键度的方差var(s),约束规划的最终优化目标为
3 约束规划方法
约束规划[36](Constraint Programming)是一种通过对全局单一资源约束的高效过滤方法,在调度、优化问题中广泛使用。其中用区间变量(Interval Variables)的形式表示相关待调度任务,相应的约束与优化目标也需要进行规范。
3.1 基于区间变量约束
区间变量具有4 个维度的参数,分别为区间变量是否存在、区间变量的开始时间、完成时间和其两者的差值,用约束规划中特有的方式PresenceOf、StartOf、EndOf、LengthOf、Alternative、StartBeforeStart 和NoOverlap 等表示。因此可用区间变量与辅助区间变量Ψk,i、ζk,i将 约束1~约束7 与优化目标进行基于区间变量的实现。
3.1.1 任务路径的区间变量约束
约束1~约束3可利用区间变量实现为式(18)~式(20):
1)约束1:可选路径约束。
2)约束2:任务发送/接收约束。
3)约束3:路径连续性约束。
3.1.2 任务传输偏移的区间变量约束
约束4~约束7可利用区间变量实现为式(21)~式(24):
1)约束4:释放/截止约束。
2)约束5:传输顺序约束。
3)约束6:资源约束。
4)约束7:帧隔离约束。
约束5 是通过约束StartBeforeStart(I1,I2,t)实现的,它限制了区间变量I2和区间变量I1的开始时间的差值至少是t个时间单位,若任一个区间变量不存在,则满足约束。约束6 通过NoOverlap 约束,其定义为其中的区间变量组之间无交叠。
3.1.3 基于区间变量的优化目标
优化目标可格式化为
3.2 Benders 分解
Benders 分解自提出以来已被广泛应用[37],此方法可将复杂规划问题分解为主问题与子问题。前文描述约束规划模型同时考虑了任务路径与任务的传输偏移,在此依据Benders 分解将此问题分为2 个阶段:首先求解任务路径问题,然后再对传输偏移进行求解。如图3 所示,先为路径问题建立模型,其中包含约束1~约束3 与可能的调度状态约束,调度状态约束可标记某一种求解路径方案不可行。如果路径模型无可行解,直接结束并提示无法解决此问题;若其有可行解,此时任务路径已经变为已知量,进而构建由约束4~约束7 组成的调度子问题若找到可行解即结束,若没有找到可行解,则添加一个调度状态约束,并再次重复前述流程。

图3 Benders 分解流程Fig.3 Benders decomposition process
4 实验分析
4.1 实验设置
实验主要关注不同的调度方法的链路安全关键度集中上的调度差异,采用约束规划方法,将其与同样基于约束规划的负载均衡(Load Balancing,LB)、最短路径(Short Path,SP)的无等待调度2 种调度方法进行对比。实验采用图4 中典型的机载网络拓扑(AIRBUS A380),其中有9 个交换机(节点编号1~9)、18 个终端(节点编号10~27),共27 节点;随机生成发送、接收端;根据机载网络任务情况[26,38]设置调度任务的周期pk在300 μs、800 μs、1 000 μs、1 500 μs中选取,设置传输持续时间ηk有:ηk∈[1,10],链路传播延迟统一设置为0.1,交换机的结构切换延迟设置为0.5 μs。
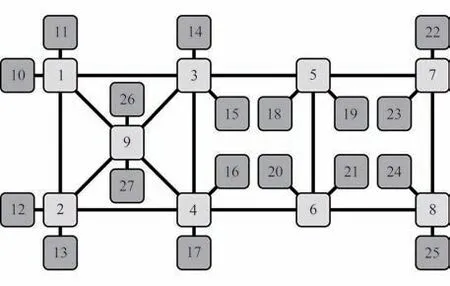
图4 实验所用网络拓扑结构Fig.4 Network topology used in the experiment
本文采用采用支持Benders 分解的IBM ILOG CPLEX Optimization studio[39-40]实 现(软件版本为22.1),文献[39-40]对此平台特性进行了详细介绍。
实验中使用的任务安全关键度基于此拓扑网络中的功能安全关键度,如表1 所示,实验选取专家数n=5,评价方面数量p=3,3 个方面分别为对飞机影响、对机组影响和对乘客影响。本实验案例中5 位专家对这3 个方面按照表2 的评分标准进行打分。最终得到的数据如表3 所示。

表1 航电功能安全关键度Table 1 Safety criticality of avionics function

表2 安全关键评价表Table 2 Safety criticality evaluation

表3 功能安全关键度专家打分结果Table 3 Expert scores of functional safety criticality
参考相关分析[41-42],将功能安全关键度分为3 个评价指标进行量化:飞机影响(A)、机组影响(B)及乘客影响(C)。将重要程度划分为4 个等级,并为各个等级指定量化范围。
进一步依据熵权法对航电功能安全关键度计算,其中涉及的数值、具体功能对应关系[43]如表1 所示。在本实验中采取50 条随机节点任务集,根据端系统与任务的对应关系即可得到任务安全关键度。
4.2 实验结果与分析
将得到的安全关键度,在上文所提到的实验平台中进行不同调度方法的调度结果求解,并将最终的调度结果进行整理。图5 和图6 为3 种不同调度方法调度结果分别在任务数为50和100 的2 种场景下的链路安全关键度(Link Safety Criticality,LSC)分布情况。表4 为计算指标结果。

表4 不同方法调度结果Table 4 Scheduling results of different methods
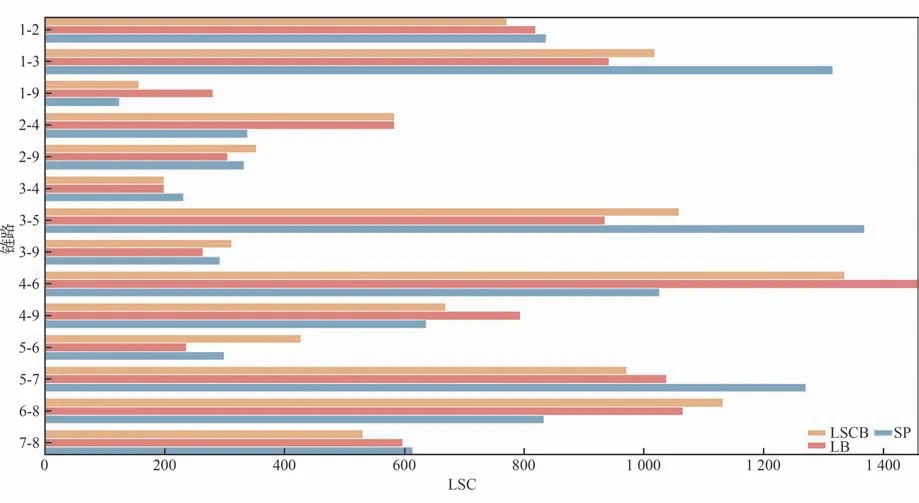
图5 链路安全关键度分布情况(任务数为50)Fig.5 Distribution of link safety criticality(number of tasks:50)
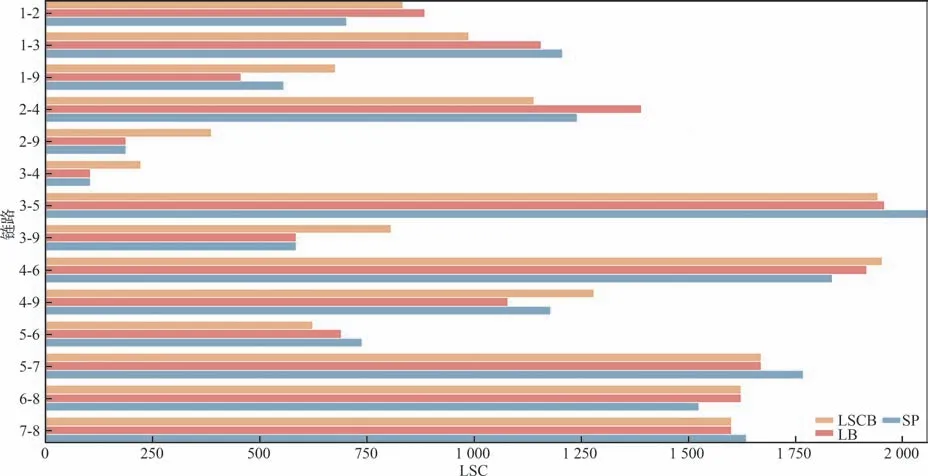
图6 链路安全关键度分布情况(任务数为100)Fig.6 Distribution of link safety criticality(number of tasks:100)
对比任务数为50 的图5 不难看出,LB 方法将链路L3,5与链路L5,7上 的LSC 向L4,6上集中,造成L4,6上 的LSC 高 至15,为全方法最高值,而SP 则是将原本在L4,6与L6,8上的LSC 集中在L1,3、L3,5与L5,7之上,造成LSC 较高的链 路较多。LSCB 将L4,6上 的LSC 向L3,5上进行转移,使LSC 集中问题得到缓解;同时也将L1,2、L4,6、L5,7等链路上的LSC 指标进行降低。在时延指标中各调度方法的任务时延均值较低,且将调度最大值维持在可接受水平。
从任务数为100 的图6 可以看出LSCB 方法与LB 方法和SP 方法相比,调度结果有一定优势,但由于实验任务集的任务需要在节点3、4 和节点5、6 两侧相互传输的任务量相对固定,在L3,5和L4,6上的安全关键度之和一定程度上已固定(如一任务从节点17 向节点21 发送,势必要经过L3,5和L4,6其中的一条),两链路上的LSC 只能相互均衡,无法向全局拓扑中其他链路均衡。但LSC 在L1,9、L2,9、L3,9、L4,9上均衡了更多来自于L1,3与L2,4的LSC,使全局的集中度更低。因此,LSCB 方法有着更好的链路安全关键度均衡能力。
在任务数为50 的场景中,LSCB 调度方法对链路安全关键度的均衡作用相较于LB 方法和SP 方法分别提升了7.1%和25%。在任务数为100 的场景中分别提升了17%和18%。结合2 个实验场景可知,LSCB 方法的链路安全关键度的均衡能力最好,LB 方法次之,SP 方法最差。由于LB 方法对负载的均衡能力,也使其在一定程度上具备链路风险均衡能力,但是当任务数增加时,由于其并未在约束与优化目标中考量缓解LSC 集中现象,导致其均衡能力有限;SP 方法的任务传输、接收节点与拓扑在一定程度上就决定了其发送路径,无法对LSC 的集中进行缓解。实验表明,LSCB 仍有一定的均衡能力,可以作为机载TSN 等高安全需求场景下利用任务调度来均衡安全关键度的一种方法。
5 结语
本文主要针对机载TSN 网络在任务传输时出现的风险汇集现象进行了研究,提出了一种优化链路安全关键均衡的调度方法LSCB。
1)对功能安全关键度进行量化,配合熵权法对不同维度赋权,并得到链路安全关键度计算方法。
2)基于机载TSN 链路安全调度对任务传输偏移与任务传输路径进行模型构建。
3)基于约束规划的方法对调度模型中约束进行标准化改写,并将LSCB 与LB、SP 调度方法进行对比,实验结果表明:相较于其他2 种调度方法,LSCB 方法对于链路安全关键度集中有一定的缓解作用(7.1%~25%);通过具体分析可知,随着任务数的增多,LSCB 方法相较于LB 方法在均衡作用上的优势更加明显;而在任务数较多的场景下在拓扑中会由于某部分的替代路径不足而无法进一步均衡LSC。
目前该方法配合的求解方法为约束规划,并不能达到特别高的求解效率,下一步计划将更高效的寻优方法与其匹配,以提高调度速度与质量。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23
移动通信(2021年5期)2021-10-25
中学生数理化(高中版.高考理化)(2021年6期)2021-07-28
加油站服务指南(2021年4期)2021-07-21
数学年刊A辑(中文版)(2020年1期)2020-05-19
人生十六七(2015年6期)2015-02-28
中国交通信息化(2014年3期)2014-06-05
NBA特刊(2014年7期)2014-04-29
自动化与仪表(2014年10期)2014-02-26
中国商人(2013年1期)2013-12-04
