基于嵌入式技术的通用模拟训练系统研究及应用
2024-04-26 01:30:42胡锴冰刘冬雪
宇航计测技术 2024年1期
胡锴冰,高 远,刘冬雪
(海装驻北京地区第二军事代表室,北京 100039)
0 引言
飞行器发射前需进行系统联调、匹配试验、对接测试、接口测试、性能测试等调试、验证环节,为避免测试时对飞行器造成损害、对其寿命造成不良影响,在测试系统中使用飞行器模拟系统代替飞行器,模拟飞行器对地面发控系统的输入、输出、通信等电气接口,在飞行器发射前完成对发射控制系统的软硬件接口检测、功能验证、人员训练等。随着飞行器的发展和技术更迭,在原有系列产品基础上衍生出多种类型的飞行器产品,针对不同系列的型号产品,需要各自配备能满足测试、训练要求的飞行器模拟装置,模拟装置通用性低、重复性投入多、研制周期长的问题日益凸显。
随着电子技术、网络技术与计算机技术的快速发展,嵌入式技术以其自身的强时效性、低功耗、高专用性等优势成为现代科技发展中的一个关键技术,目前已广泛应用于军用领域、工业领域和通信领域[1]。基于嵌入式技术的通用飞行器模拟系统设计方法,模拟飞行器电气电路、通信及工作状态,可适配多种类型的飞行器。由于嵌入式系统可编程的特点[2],使模拟系统具有更好的灵活性、可扩展性和通用性。
1 通用模拟训练系统概述
通用模拟训练系统采用DSP +CPLD 嵌入式架构,充分利用DSP 和CPLD 丰富的IO 资源和编程资源,为模拟系统的通用性提供资源保证。模拟训练系统的硬件平台资源可覆盖当前各型飞行器模拟系统功能需求,输入、输出信号通道设计均有余量。针对不同测试需求,仅需根据实际情况调整软件中输入、输出信号通道数,选择通信接口类型,即可满足测试所需的资源。
模拟训练系统硬件主要由信号调理模块、计算机控制模块和通信模块组成,实现输入控制信号检测、模拟状态信号输出、模拟弹地通信等飞行器模拟功能[2]。通用模拟训练系统设计框图如图1所示。

图1 通用模拟训练系统设计框图Fig.1 Block diagram of general simulation training system
计算机控制模块通过自动读取飞行器类型信息,完成控制信息采集、状态信号输出功能以及数据存储功能。信号调理模块实现输入信号的隔离和输出信号的变换。通信模块实现多种类、多通道通讯接口,以便满足不同型号飞行器产品模拟的需求,与计算机控制模块之间通过SPI 总线进行信息交互,通信模块功能相对独立,通过更换具有不同通信接口的模块即可与更多的飞行器类型相适配,具有良好的可扩展性。
根据模拟训练系统选用的硬件平台,可实现的电气功能指标总结如表1 所示。
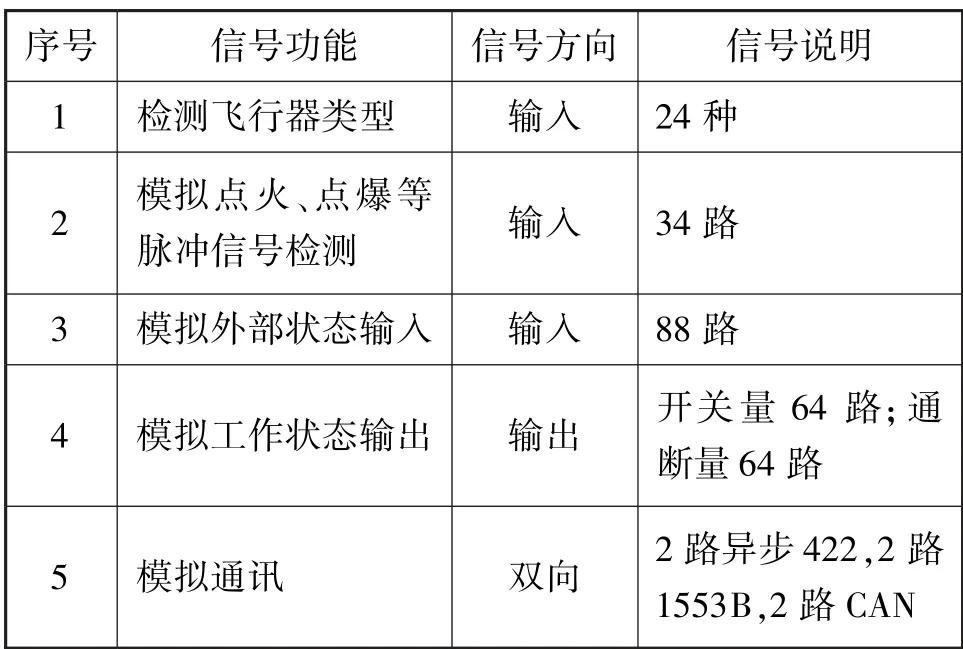
表1 电气功能指标Tab.1 Electrical function index
2 系统硬件设计
2.1 计算机控制模块设计
计算机控制模块以DSP 为控制核心,DSP 芯片及其外围电路组成CPU 控制单元,根据类型设置信息确定输出电压的通道数量和输入信号检测通道数量,完成信息处理、程序及数据存储等功能。DSP通过总线连接CPLD 扩展IO,CPLD 解析DSP 的指令后相应的GPIO 动作实现输入IO 检测和输出IO控制。DSP 和CPLD 的调试JTAG 接口引出到模拟训练系统的对外连接器上,方便实时调试和程序升级。DSP 外扩SRAM 和FLASH,进行程序存储和数据存储。计算机控制模块通过串行外设接口SPI 控制与通信模块之间的数据交互。按照类型设置信息,模拟对应型号飞行器的自检通信、飞行器测试等通信功能的模拟。计算机控制模块组成如图2 所示。

图2 计算机控制模块组成框图Fig.2 Block diagram of computer control module
DSP 采用TI 公司的TMS320 系列处理器,该芯片利用改进的哈佛总线结构与多流水线技术,内部集成硬件乘法器可大大提高系统的浮点或定点的数据运算能力[3]。器件内部集成了存储资源、可编程I/O、定时器和SPI 等通信接口,其强大的功能和丰富的资源确保模拟训练系统的实现。
CPLD 选用Xilinx 公司的XC2C512-10FG324I,具有512 宏单元,低功耗、快速特性的可编程系统,四块独立的IO BANK 提供270 个可用IO,满足多路信号控制和检测的需求。
2.2 信号调理模块设计
信号调理模块作为执行模块,将输入的转电控制、激活通路检查等控制信号送光耦隔离,输出至CPLD 的IO 端口供DSP 检测查询。针对不同的输入信号采用积分电路和锁存器提升输入信号平滑性,剔除瞬态抖动干扰。DSP 软件根据通讯协议输出控制信号驱动继电器动作,继电器触点的闭合或断开模拟飞行器通断量电气信号,继电器触点切换输出电压模拟飞行器的开关量电气信号[4]。信号调理模块组成如图3 所示。

图3 信号调理模块组成框图Fig.3 Block diagram of signal conditioning module
2.3 通信模块设计
通信模块由DSP 单元、FPGA 单元及隔离驱动电路组成,如图4 所示。其中DSP 单元包含SPI 协议控制器,用于解析来自计算机控制模块的指令和通信接口的控制操作[5],如1553B 通道的RT 地址使能、RS-422 接口波特率和字格式的设置、CAN 通信接口波特率设置等,为与外部接口速率相匹配且留有余量,SPI 接口波特率配置为5 Mbps;DSP 内部的CAN 通信模块与外部的驱动电路共同实现CAN通讯接口。FPGA 单元实现RS422 和1553B 通讯协议,配合外围隔离电路[6],完成通信协议的转换。通信模块中每路通讯可以独立工作,互不干涉,根据识别的飞行器类型,系统软件使能一种通讯接口完成飞行器模拟功能。
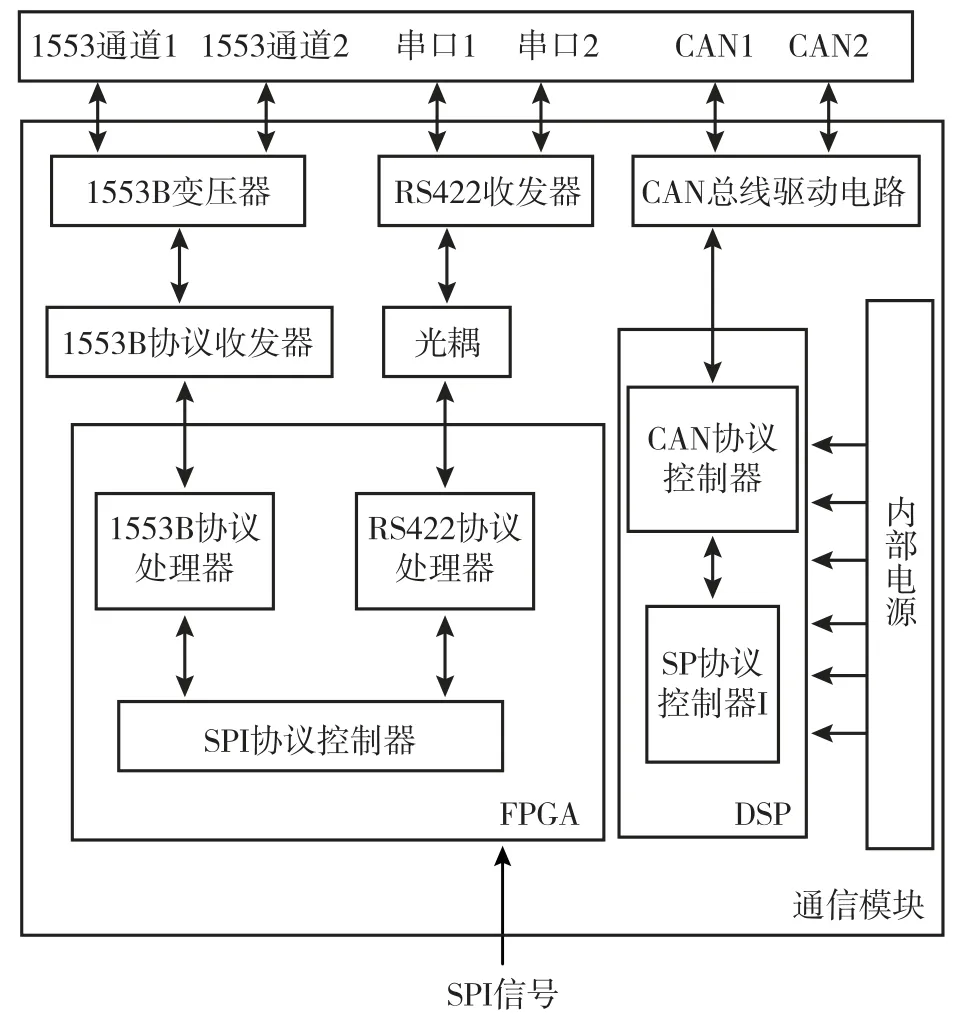
图4 通信模块组成框图Fig.4 Block diagram of communication module
为满足多种系列飞行器模拟功能测试需求,通信模块硬件实现2 路异步422、2 路双冗余1553B 总线通信和2 路CAN 通信。异步422 通信接收端采用光耦隔离,接口为典型的RS -422 四线接口。每一路1553B 总线均提供两个数据总线接口(MuxA和MuxB),进行双余度通信链接[7];电路接口使用隔离变压器进行隔离。CAN 总线驱动电路提供差动的发送、接收功能,配合总线保护电路实现CAN通讯接口[8]。
通信模块与外部互联的SPI 接口物理上只需选通信号SPI_CS、时钟信号SPI_CLK、输入信号SPI_DI 和输出信号SPI_DO 四根线,接口设计简单,便于扩展,只需更换其他不同种类的通信接口模块即可满足相匹配的飞行器模拟和训练需求。
3 系统主要软件
模拟训练系统软件包含计算机控制模块的DSP软件和CPLD 软件、通信模块的DSP 软件和FPGA软件。计算机控制模块的CPLD 软件和通信模块的FPGA 软件均作为各自模块的协处理器软件,执行DSP 软件的指令。CPLD 软件完成离散GPIO 信号输入状态读取和输出设置功能,为防止对关键输入信号的误判断,除在硬件上设置滤波电路外,软件中包含了去抖功能,检测到输入信号变为有效电平后每隔200 μs 读取一次信号状态,连续8 次均为有效电平则判定检测到的是有效的输入信号,否则判定为无效信号。软硬件结合剔除信号毛刺的方式,有效提高了系统的抗干扰能力。FPGA 软件集成RS422 和1553B 通信协议IP 核,实现SPI 与RS422或1553B 通信协议的转换。
模拟训练系统的主要工作流程由计算机控制模块的DSP 软件和通信模块的DSP 软件完成,软件开发环境为CCS,它是TI 公司推出的专用于DSP开发的集成性开发工具。
计算机控制模块的DSP 软件为本系统的主控软件,包含上电自检、类型识别、通信类型选择、参数传输等功能。主控DSP 软件的流程图如图5 所示。

图5 DSP 软件流程图Fig.5 Flowchart of DSP software
通信模块内部的DSP 软件内部包含SPI 控制模块、通信协议控制模块、数据存储模块,主要用于各类通信接口的配置。通信模块内部的DSP 软件流程图如图6 所示。
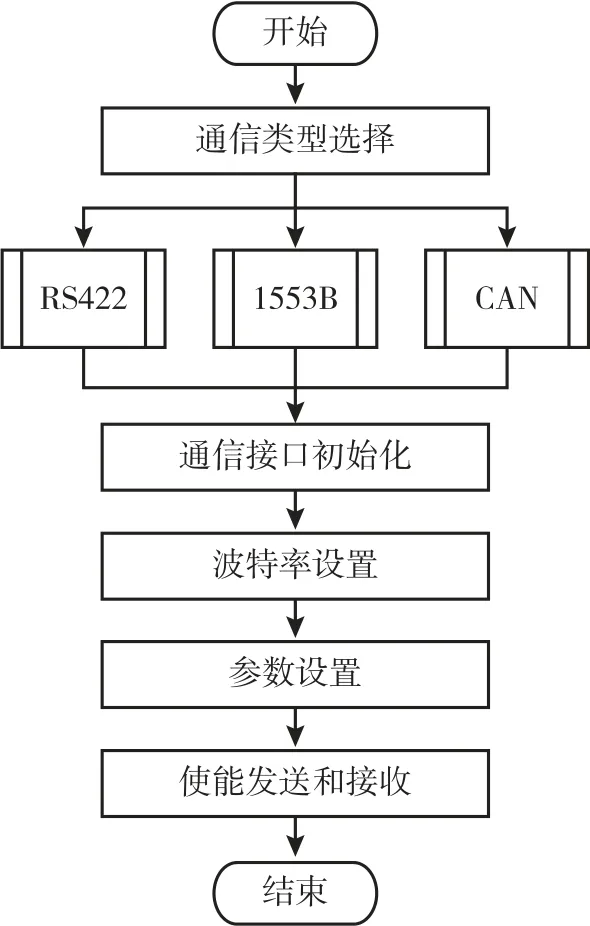
图6 通信模块DSP 软件流程图Fig.6 DSP software flowchart of communication module
4 结束语
电子技术不断发展和高科技环境下的军事需求促使飞行器性能不断提升,型号的更新换代促使模拟训练系统随之适配升级。根据不同飞行器发控系统的测试功能需求,设计一种具有通用性的飞行器模拟训练系统,具有良好的可扩展性和灵活性,可大大降低飞行器训练和模拟的硬件成本、人力成本和时间成本,解决了配套模拟训练系统种类繁多、研制周期长、研制成本高等问题,目前已成功应用于多个型号的飞行器模拟训练中,功能和性能均达到了使用要求,对其他类似功能设备的研制也具备一定的参考意义。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
电子制作(2018年2期)2018-04-18 07:13:25
中学科技(2018年2期)2018-03-15 22:05:13
中学科技(2016年12期)2017-01-07 08:49:31
中学科技(2016年11期)2017-01-07 02:49:29
电脑知识与技术(2016年26期)2016-11-25 00:00:00
中学科技(2016年8期)2016-09-27 17:41:48
现代工业经济和信息化(2016年5期)2016-05-17 05:36:01
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
科技创新导报(2013年6期)2013-04-29 00:44:03