某型核电厂EDG 电子调速器典型故障原因分析
2024-04-23 01:29:38李聿容王启峰陈晓勇
设备管理与维修 2024年7期
陈 锋,李聿容,王启峰,陈晓勇
(1.核电运行研究(上海)有限公司,上海 200120;2.中核核电运行管理有限公司,浙江嘉兴 314300)
0 引言
作为核电厂内的应急交流电源,EDG(应急柴油发电机组)通常在失去厂外电源的情况下能满足应急厂用电的要求,以确保反应堆安全停堆,并防止由于外部电源系统失电而导致重要设备的损坏。EDG 的瞬态性能主要依赖于柴油机的调速系统,而调速器是调速系统的核心部件。
电子调速器是一种采用电子控制技术实现转速测量、设定、比较与调节的调速装置,具有响应速度快、调节精度高、恒速性能好等优点[1-3],能够满足柴油发电机组的无差并联运行要求。然而,从国内外核电厂的经验反馈来看,调速器已成为EDG 的故障高发部件之一。目前国内EDG 使用的PC 和PA 两种主流机型柴油机,均配置了型号为E19600 的进口电子调速器,故障尤为突出。因此,本文针对E19600 型电子调速器的故障特点和原因,结合近年来主要故障类型,探究故障成因和预防措施,以提高机组的可靠性和安全性。
1 故障详情
对国内外核电厂EDG 电子调速器故障进行统计和分析,可以总结出常见的故障模式主要分为三类,分别为转速输入异常、看门狗报警和无输出或输出异常。
1.1 转速输入异常
转速信号是电子调速器的关键输入信号之一,它直接反映了柴油机的运行状态。转速信号的输入异常会使电子调速器的PID 控制算法失去作用,无法作出正确控制动作,从而导致柴油机转速不稳定,甚至触发EDG 的低频保护功能,造成柴油机停机。
1.2 看门狗报警
单片机系统可能因为外界干扰或内部错误而导致死机现象,为了提高系统的可靠性和稳定性,需要设置看门狗来监测程序的运行状态。看门狗是一种软件程序或硬件芯片,它可以通过设定的判断条件来识别程序是否出现异常。一旦发现异常,看门狗会执行复位操作,强制程序重新启动。因此,看门狗报警表明电子调速器出现了故障,可能使柴油机速度失控、降低应急柴油机的可用性。
1.3 无输出或输出异常
电子调速器根据设定的控制算法和参数,将控制信号输出至执行机构,控制柴油机燃油量,无输出或输出异常会直接造成柴油机不可用的严重后果。某核电厂的EDG,曾因为电子调速器输出异常导致再鉴定试验时两次逆功率跳闸。
2 原因分析
2.1 转速输入异常
导致转速信号输入异常的原因有多种,如转速测量装置本身的故障、转速信号电缆的老化或损坏、转速信号电缆的屏蔽线接线不正确、外部电磁干扰等。某电厂使用E19600 型电子调速器的备用柴油发电机组曾经发生过因转速信号输入异常而导致柴油机停机的事故[4]。事故原因分析表明,转速信号电缆的屏蔽线接线错误,导致外部电磁场对转速信号产生了干扰,从而使PID 控制算法失效,引起柴油机转速波动。为了防止类似事故的再次发生,建议采取以下措施:一是完善维修规程,规范转速信号电缆的接线方式,确保屏蔽线正确接地;二是制定预防性维修策略,定期检查和更换转速测量装置和转速信号电缆,消除故障隐患;三是增加外部电磁干扰的监测和防护措施,减少对转速信号的干扰。
2.2 输出电流异常
PC 机型柴油机执行机构的驱动电流工作范围为0~0.2 A,PA 机型柴油机执行机构的为0~1 A,该电流由电子调速器的驱动电路发出。当PA 机型柴油机正常启动时电子调速器驱动电路的输出电流与正常数值相比出现较大偏差,即为无输出或输出异常。此类故障在PA 机型柴油机中也较为常见,在实验室测试台架测试中也可以复现部分故障。
2.2.1 输出电流波动
某核电厂PA 机型柴油机中电子调速器的故障特征是输出电流波动异常,且不能超过0.877 A。因此,将电子调速器在常温条件下断电静置4 h,然后接入测试台架,并用红外测温仪测量T1(三极管)的表面温度。测试结果显示,T1 的表面温度快速上升,同时输出电流逐渐从1.014 A 降至0.877 A 并保持稳定。随着T1 温度继续升高,输出电流下降得更快。E19600 型电子调速器驱动电路原理如图1 所示。
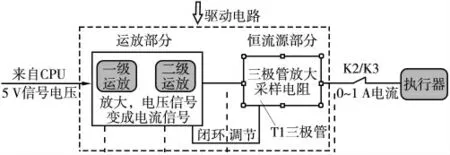
图1 电子调速器驱动电路原理
为了验证T1 是否为故障损坏,更换新驱动板卡后重新进行台架测试。同时,用红外测温仪监测T1 的表面温度。结果显示,虽然T1 的表面温度仍然快速上升,但输出电流稳定在1.014 A 的水平(表1)。
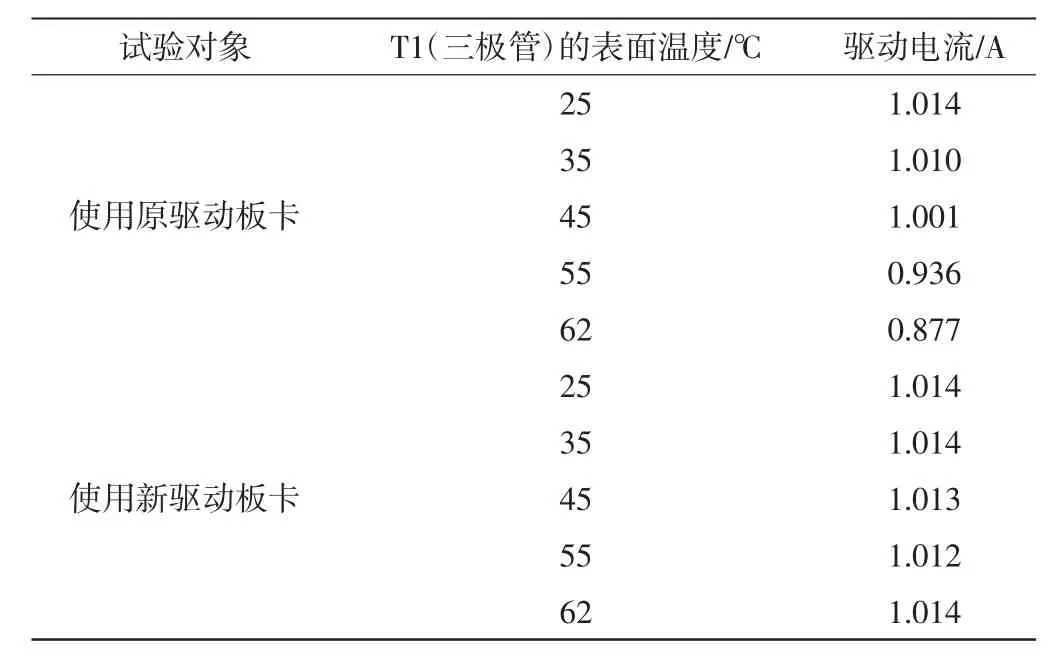
表1 电子调速器输出电流试验数据
为了进一步分析电子调速器驱动电路的故障原因,分段测量试验用电子调速器的驱动板卡上的运算放大器、三极管等元件工作电压。结果显示,原驱动板卡上的T1 后级的工作电压明显低于新驱动板卡上的相应电压,这会导致输出电流的降低,也与故障的特征一致,因此故障定位在T1 中。
在测试中通过热像仪观察发现,使用原驱动板卡和新驱动板卡时T1 的表面温度均较高(图2)。
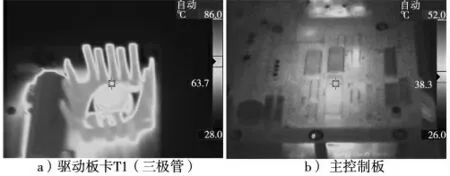
图2 工作状态下电子调速器板卡的热像仪测量
根据图2,驱动板卡T1 的表面温度升高至63.7 ℃。由于驱动板卡位于主控制板的下方,其散热效果受限。此外,在执行机构驱动电流的设计方面,PA 机型采用24 V 的直流电源,高于PC 机型的15 V;运行状态方面,PA 机型在柴油机处于热备用时,电子调速器也处于带电备用,而PC 机型的电子调速器处于不带电状态。这些因素加剧了PA 机电子调速器驱动板卡散热不利的问题,可能会影响驱动板卡电气元件的可靠性。
2.2.2 输出电流偏大
某核电厂EDG 在定期试验中,出现了启动失败的故障,主要现象是:柴油机转速在5 s 内不能超过300 r/min,执行机构不动作,电子调速器输出电流异常。为了分析故障原因,对电子调速器输出电流进行监测(表2)。
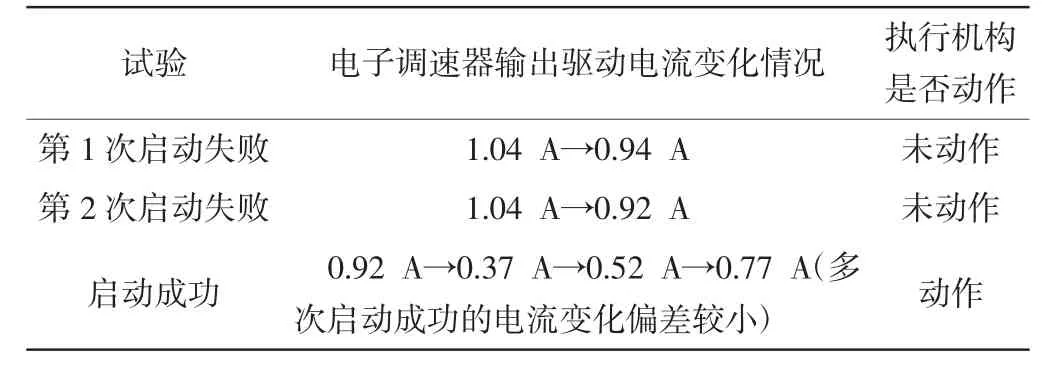
表2 电子调速器输出驱动电流变化情况
从表2 可以看出,启动成功时,电子调速器输出电流随着转速和油门开度的变化而变化;启动失败时,输出电流基本保持在1 A 以上、无明显变化。但该故障暂未能在实验室测试台架中复现,根据经验推测故障原因可能是,电源系统的电压浪涌影响了电子调速器内部的运算放大器U36,导致输出驱动电流偏高。
2.2.3 输出电流无变化
图3 为E19600 型电子调速器的局部电路图。PA型柴油机采用的2231 型执行机构是一个感性负载,当24 V 的驱动电源断开时,会在执行机构两端产生一个反向电动势。在早期版本的电子调速器中,24 V电源的负极连接在K3 开关的下方,即图中2 号位置。
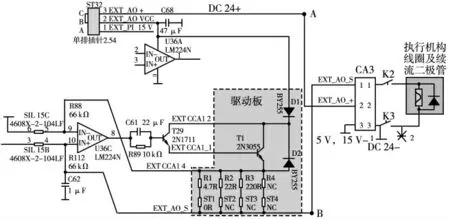
图3 电子调速器局部电路图
实验室测试表明,当K2、K3 开关断开时,只切断了24 V 电源的负极而正极仍然连通;当K2、K3 开关闭合时,24 V 电源和反向电动势会同时加在驱动板的运算放大器U36 上,导致图3 中的A、B 两点之间出现一个反向电动势峰值(高达20 V),可能会损坏运算放大器,使其输出端对地或对24 V 电源短路。通过电路仿真软件分析,运算放大器输出对地短路和对24 V电源短路两种情况,都可以模拟出驱动电流固定为0或1 A 的现象。因此,后期升级的电子调速器时将24 V电源的负极连接在图3 中1 号位置,这样可以保证K2、K3 开关断开的同时切断24 V 电源的正极和负极,消除原来设计的缺陷。
2.3 看门狗报警故障分析
根据历史故障数据,本文将看门狗报警分为随机故障报警、上电偶发报警两类。
2.3.1 随机故障报警
图4 是PA 机型柴油机用E19600 型电子调速器基本工作原理。为了适应PA 机型柴油机使用的2231 型执行机构,设计方对E19600 电子调速器的驱动电源进行了修改。原来的驱动电源是24 V 直流电经过隔离变压器转换为15 V 直流电,输出电流范围是0~0.2 A。修改后的驱动电源是直接使用24 V 直流电,输出电流范围达到0~1 A。同时,设计方将外部24 V 电源的参考地和内部5 V 电源的参考地连接在一起。这样破坏了原来的电源隔离功能,使得电子调速器更容易受到电压冲击、浪涌等干扰信号的影响,并且影响EEPROM 和CPU的供电稳定性,增加了看门狗误动作报警的可能性。
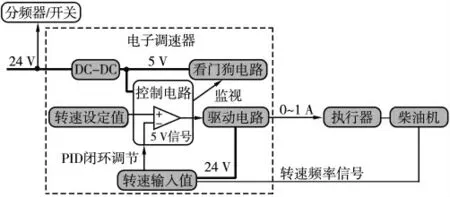
图4 E19600 型电子调速器基本工作原理
在实验室测试台架测试中,监测EEPROM 芯片U32 的接地引脚,发现有100~300 mV 的电压波动。在柴油机的实际运行工况下,该波动有可能会被放大,使CPU、EEPROM、看门狗芯片出现工作不稳定的问题。
浪涌模拟装置模拟测试试验情况如图5 所示,中间位置的曲线(红色)为试验中模拟24 V 电源受到浪涌干扰,同时在看门狗芯片5 V 电源电压也监测到1个相位相同的干扰(最上面那条曲线),而此时看门狗芯片的WDO 引脚输出变为低电平,看门狗报警出现。
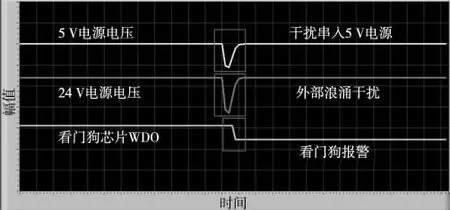
图5 浪涌模拟装置模拟测试结果
在看门狗芯片电源电压波动模拟试验时发现,将看门狗芯片5 V 电源电压降至4.65 V 时,CPU 无状态信号发出,说明此时EEPROM 工作出现异常。同时监测看门狗U42 芯片的WDO 引脚,发现输出变为低电平,看门狗报警出现。由此推断,24 V 电源和5 V电源共参考地会使隔离电源的保护功能失效,在柴油机运行或备用状态下一旦出现较大干扰,电子调速器EEPROM 的供电电压降低、EEPROM 进入工作不稳定状态,影响CPU 读取校验值,造成看门狗随机报警。
由上述分析可以看出,看门狗随机故障报警的原因为:外电路24 V 电源直接对电子调速器的驱动电路供电,并且与5 V 电源共参考地会失去隔离电源的保护功能,进而产生电压干扰,造成看门狗芯片电压不稳定,随机出现看门狗报警。将24 V 内外部供电进行单独隔离后,可以解决此问题。
该故障虽不会直接导致柴油机停止工作,但是会使电子调速器失效,切断对柴油机转速的自动控制。此时,柴油机只能依靠机械调速器(执行机构)来调节开度油门,而机械调速器由于接收到0 A 信号,会使开度油门保持在最大值,这样柴油机的启动时间会大大缩短,从而加快柴油机摩擦副的磨损程度。
2.3.2 上电偶发报警
电子调速器上电偶发看门狗报警故障,可以在实验室测试台架上重现:采用可调稳压电源为电子调速器提供24 V 的电压,通过观察看门狗指示继电器K2、K3的吸合状态,检测上电后的报警情况。试验结果显示,继电器K2、K3 存在随机吸合现象,看门狗报警指示灯亮起,表明电子调速器上电偶发看门狗报警故障发生。图6 是E19600 型电子调速器看门狗报警电路,其中电路1 是电子调速器内部看门狗电路,电路2 是电子调速器外部看门狗报警电路。
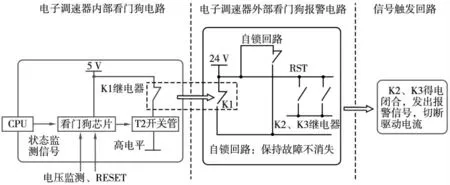
图6 看门狗报警电路
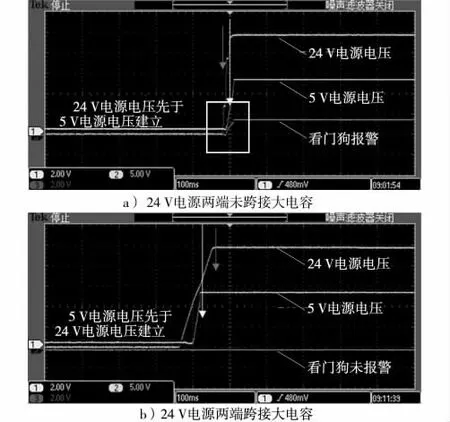
图7 电源上电顺序对比试验结果
在正常工作状态下,CPU 向看门狗芯片发送持续脉冲的状态监测信号,看门狗芯片输出高电平,使开关管T2 导通,5 V 电路导通,继电器K1 得电打开(常闭触点),电路2 不形成闭合回路,看门狗指示继电器K2、K3 失电无法闭合,不输出看门狗故障报警。
在看门狗报警状态下,如果看门狗芯片超过1.6 s没有收到脉冲信号或5 V 电源电压低于4.65 V,看门狗芯片输出低电平,使开关管T2 截止,继电器K1 失电闭合(常闭触点),外部看门狗电路在24 V 电压作用下形成闭合回路,看门狗指示继电器K2、K3 得电吸合,触发报警。同时K2、K3 继电器自锁,自锁后K1 继电器即使断开,报警仍旧存在,通过复位功能可以消除报警。
在实验室测试台架测试中发现5 V 电源和24 V电源上电顺序不同也会触发看门狗报警,如果5 V 电源先建立不会触发看门狗报警,如果24 V 电源先建立则会触发看门狗报警,即上电偶发报警。在24 V 电源两端跨接大电容后再上电,延长了24 V 电源电压建立的时间,晚于5 V 电源电压的建立,此时K2、K3 继电器没有吸合,看门狗电路未出现报警。
电子调速器用的5 V 电压是通过24 V 电压转换获得的,理论上是先有24 V 电源后有5 V 电源。但是在试验中发现,5 V 电压的建立不需要等到24 V 电压的完全建立,当的者电压输出超过12 V 时5 V 电源电压即可建立。因此,24 V 电源电压和5 V 电源电压建立的顺序存在一定随机性,这也导致电子调速器上电时偶发看门狗报警。此问题属于设计缺陷,可以通过对24 V 电压跨接电容或延迟上电来解决。
3 结束语
根据历史故障统计,PA 机型柴油机中E19600 型电子调速器的故障发生概率尤为明显。通过实验室测试台架试验及分析,调速系统设计结构不合理是导致电子调速器故障频发的主要原因,主要体现在以下3 个方面:
(1)为使电子调速器能驱动2231 型执行机构,将外部驱动电路电源电压提高至24 V,并且与5 V 电源共参考地,这将会产生电压干扰,造成看门狗芯片电压不稳定。
(2)由于看门狗电路设计问题,导致电子调速器内部看门狗电路5 V 电压和外部看门狗电路24 V 电压建立的顺序存在一定随机性。
(3)因电源设计改变,电子调速器外部驱动电路电源电压提高至24 V,叠加内部结构设计不合理且长期处于带电工作状态等因素,导致电子调速器工作温度较高,明显加快了电子元件的老化速度。
由于E19600 型调速器核心技术受制于国外制造商,一旦发生重大故障,核电厂人员难以定位故障部件、分析故障原因,只能将设备返厂检查,这已成为影响EDG 安全稳定运行的重大隐患。为了彻底解决该问题,急需开展该设备的国产化研究及应用工作。
猜你喜欢
阅读(高年级)(2019年10期)2019-12-13 07:17:26
汽车与新动力(2019年5期)2019-11-07 03:58:32
汽车观察(2019年2期)2019-03-15 06:00:54
水电站机电技术(2016年1期)2016-02-28 14:21:36
合成技术及应用(2015年3期)2015-12-11 08:36:27
大众科技(2015年11期)2015-11-24 01:57:16
小学生·新读写(2015年2期)2015-06-10 11:55:07
汽车与新动力(2015年1期)2015-02-27 12:10:58
小学生作文选刊·低年级版(2014年11期)2014-11-21 18:54:05
水电站机电技术(2014年4期)2014-10-13 08:30:03