一种基于AI 图像识别技术的动态科普装备设计
2024-04-23 01:29黄洪明刘卫庄吉胜旺
设备管理与维修 2024年7期
黄洪明,刘卫庄,吉胜旺
(合肥通用机械研究院有限公司,安徽合肥 230031)
0 引言
科普活动是提高公众科学素质的重要途径,提高科普活动的互动性和参与性是科普活动面临的重要问题。传统的科普方式往往采用静态展示和讲解的方式,难以满足现代观众的需求。随着科技的进步,一些高科技设备被引入到科普活动中,例如VR(Virtual Reality,虚拟现实)、AR(Augmented Reality,增强现实)等。但是,这些设备往往需要专业的操作和维护,成本较高。因此,提出一种基于AI 图像识别技术的动态科普装备设计方案,该装备利用AI 图像识别技术自动识别观众的互动行为,并根据识别结果动态调整科普展品机构的动作状态,提高了科普活动的互动性和参与性。同时,该装备具有操作简单、维护方便、成本低廉等优点,能够满足大多数科普活动的需求。
1 系统概述
基于AI 图像识别技术的动态科普装备是一种全新的科普展示系统(图1)。主要由计算机、显示屏、摄像头、伺服电机、光电传感器、PLC 控制系统等组成。系统采用先进的AI 图像识别技术,实时捕捉弹射亚克力圆片的弹射轨迹,根据识别结果动态反馈所在区域信息,并实时传输给PLC 控制系统,PLC 控制系统驱动伺服电机摆动角度阻挡亚克力圆片入框。这种闭环控制系统的设计能够让观众互动操作10 次基本有9 次都不能将亚克力圆片弹射到目标框中,偶尔的一次机会也是程序有意为之,让观众十打九不中,在展示AI 图像识别技术精准性的同时,也为观众提供更加丰富、有趣的科普体验。这种设计思路增强了科普展品互动的挑战性,同时也激发了观众的好奇心和探索欲望。
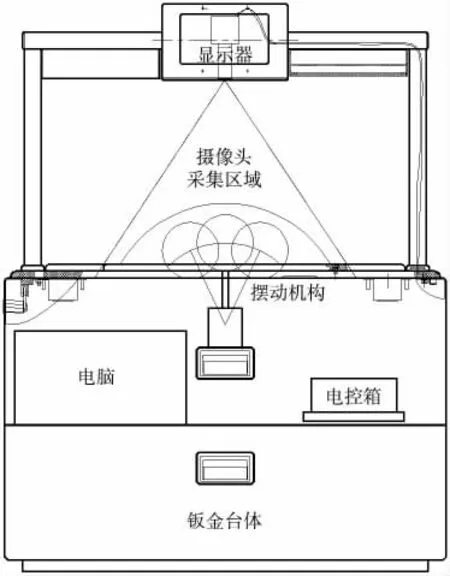
图1 科普装备展示
2 AI 图像识别技术原理
AI 是通过模拟人类智能的技术,使计算机系统能够像人一样具备某些能力。其中人工智能视觉技术的发展助力于识别图像和物体,为人类提供更智能的解决方案。
AI 图像识别技术的工作原理主要是对图像的处理和分析,以识别其中的特定内容(图2)。系统通过摄像头捕捉获取图像数据,一旦识别到区域动态的物体或行为,AI 软件就对图像进行必要的预处理,如去噪、增强对比度、缩放等[2]。进而进行特征提取,从预处理后的图像中提取关键特征,如颜色、形状、纹理等。最后进行模型训练,大量的标记采集图形的数据进行分类和识别。
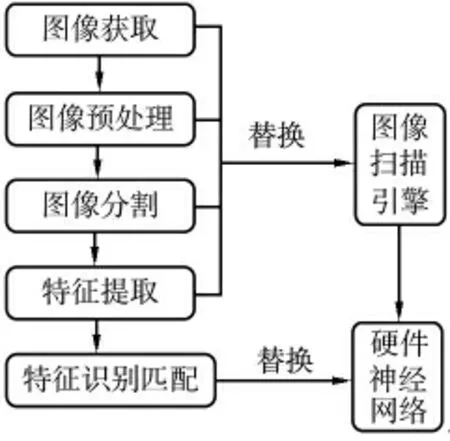
图2 AI 图像识别技术原理
3 动态科普装备结构设计
动态科普装备的结构设计主要由设备的硬件和软件两大部分组成。通过合理的硬件和软件结构设计,动态科普装备可以实现高效、稳定的运行,提供丰富、有趣的科普体验。在设计过程中,要充分考虑实际应用场景和需求,注重结构的稳定性、安全性和可维护性。同时,结合AI 图像识别技术的特点,确保结构设计的合理性和有效性。
3.1 机械结构设计
设计一个稳固的机械支撑结构(钣金台体),用于安装和固定所有的硬件设备。这个结构要足够坚固,能够承受设备的重量和可能的振动。对于显示器及摄像头的功能位置,设计一个门框型支架,安装在钣金台体上,摄像头镜头向下,所采集图像区域设置在台体表面。阻挡圆形亚克力圆片的摆动机构设置在操作台体的对面,设计伺服电机的支架及连接机构、对射传感器支架及亚克力挡板等机构。形态设计如图3 所示。
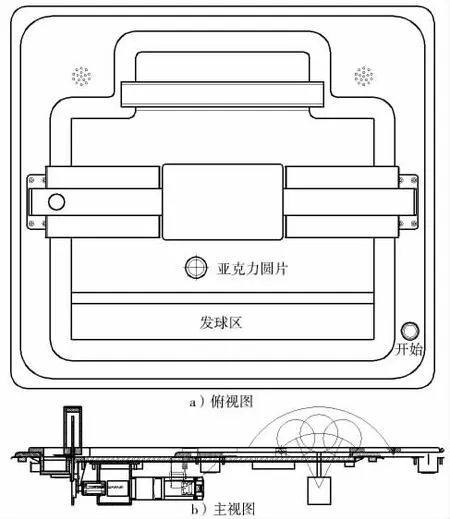
图3 机械结构设计
3.2 电气系统设计
AI 图像识别技术动态科普装备的电气设计要确保装备正常运行的稳定性和可靠性。选择合适的驱动方式,以实现机械机构的精确控制。同时,需要设计相应的控制系统,用于接收和处理来自AI 图像识别技术的指令,驱动伺服电机摆杆机构做出相应的动作。该系统主要由计算机、摄像头、显示屏、PLC 控制器、伺服电机及对射传感器等组成。
3.2.1 电源系统设计
选择合适的电源类型,这里选用输入AC 220 V,输出DC 24 V,功率为100 W 的直流电源。直流电源具有滤波、稳压、过载保护、短路保护等功能,为装备提供稳定可靠的电源供应,电源系统原理如图4 所示。
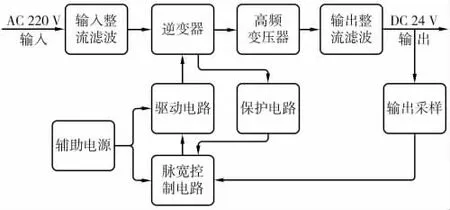
图4 电源系统原理
3.2.2 信号处理与传输
使用摄像头捕捉亚克力圆片的位置信息,在捕捉到图像后,需要进行预处理步骤、图像大小调整、对比度和亮度调整,以改善图像质量,使其更适合后续的图像分割和特征提取步骤。这些信息以图片的形式捕捉存储,并转换为数字信号,以便进行后续处理。系统通过特定的通信协议(串行通信)将信息位置传输给PLC控制器(图5)。PLC 控制器将根据接收到的信息执行相应的动作或操作。
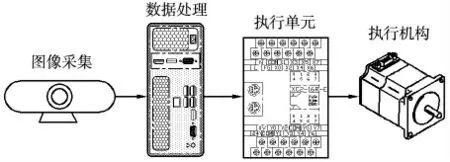
图5 信号处理流向
3.2.3 控制电路设计
控制系统的电路设计需要综合考虑多种因素,包括控制目标、控制精度、系统稳定性、可靠性、可扩展性等。根据控制目标,确定系统的主要参数,如输入信号、输出信号、系统动态性指标等。选择合适的传感器和执行器,满足目标控制需求,根据系统参数和传感器、执行器的特性,设计合适的控制电路,实现整个系统控制。系统电路原理如图6 所示。
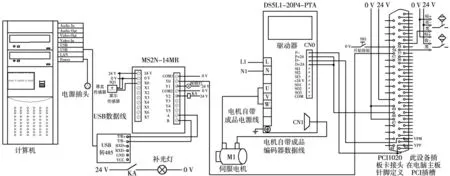
图6 系统电路原理
3.3 软件设计
AI 图像识别系统是对图像的智能分析、系统联动和效果展示。图像分析主要由图像采集单元、智能分析检测单元、信号传递和设备控制单元组成。AI 图像识别系统与PLC 控制器进行交互,PLC 控制器接收到亚克力圆盘的位置信息后,根据预设的逻辑算法,控制伺服电机进行角度摆动。光电传感器检测到亚克力圆片通过界线时,PLC 会触发一个信号,使机械臂移动到相应的位置进行操作,系统并触发一段音效与观众交互。
这个过程可以分为6 个主要步骤:①摄像头捕捉:使用摄像头捕捉亚克力圆片的位置信息,并将其进行记录存储;②图像处理:捕捉到的图像,进行图形预处理,包括图像大小、图像对比度、图像亮度的调整,为后续的图像分割做准备;③图像分割:将图像划分为多个区域或对象,通过AI 算法识别分割出亚克力圆片的位置;④特征提取:在图像被成功分割后,提取有关亚克力圆片的特征,包括图片的形状、大小、颜色和纹理。存储这些特征用于后续的识别和匹配;⑤位置信息的传输:系统识别和匹配完成后,通过串行通信的方式将位置信息传输给PLC 控制器,PLC 控制器根据接收的相应信息执行动作;⑥与PLC 控制器的交互:PLC 控制器接收到AI 系统上位机的数据信息,控制伺服电机动作,使挡板机构进行角度位置的控制。
整个系统的软件流程,涉及到计算机视觉、图像处理、机器学习,需要相应的算法和PLC 控制器的逻辑控制。
4 结束语
随着人工智能技术的快速发展,AI 图像识别技术在各个领域的应用越来越广泛。在科普装备领域,基于AI 图像识别技术的动态科普装备设计为观众带来了更加丰富、互动和沉浸式的科普体验[3]。本文重点介绍基于AI 图像识别技术的动态科普装备设计方案,包括硬件和软件两个方面。通过AI 图像识别技术的使用为科普装备的发展注入了新的活力,利用先进技术,可以更加生动、直观地向观众传递科学知识,提高公众的科学素养。
猜你喜欢
知识窗(2021年1期)2021-02-23
河北画报(2020年10期)2020-11-26
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年4期)2019-07-13
小学生学习指导(低年级)(2019年3期)2019-04-22
少儿科学周刊·少年版(2019年1期)2019-04-18
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
小学生学习指导(中年级)(2017年6期)2017-05-13
数学小灵通(1-2年级)(2017年4期)2017-05-04