汽车碰撞试验中视频分析的影响因素研究
2024-04-22 07:18李珂邹阳徐修权李帆
时代汽车 2024年3期
李珂 邹阳 徐修权 李帆


摘 要:在汽车碰撞试验中,高速视频影像是汽车碰撞试验中获取车辆结构变化,假人运动等许多关键数据的重要手段,视频分析软件在其中广泛应用。影响视频分析技术结果的因素有许多,影响程度也不一。文章通过理论以及试验方法对视频分析影响因素进行分析,重点探讨相机标定、相机焦距和相机俯仰角对摄像分析结果的影响。
关键词:高速摄像 视频分析 汽车碰撞试验
1 引言
随着时代的发展,汽车作为如今人类出行使用最广泛的交通工具,让人们的工作和生活更加便利,但是也造成了一些危险的交通安全事故,提高汽车的碰撞安全性已成为汽车安全研究的重要内容[1-3]。随着安全需求的提高,为保护乘员免受车祸,国内外各大汽车品牌通过各种各样形式的碰撞试验来验证车辆在交通事故中的安全表现。在汽车碰撞试验中,高速视频影像是汽车碰撞试验中获取车辆结构变化,假人运动和伤害机理,约束系统及相关装置工作状态数据的主要手段之一,应用十分广泛[4-6]。由于计算机技术中数字化图像的发展,研究人员对图像处理算法进行不断优化,从而视频测量分析方法也受到更多关注。过去很多试验都是三坐标测量以及传感器测量,但是这些方法都有一些局限性,如三坐标测量在碰撞过程中不能实时监测,传感器安装起来比较复杂。和传统的测量手段不同,一帧图像即可记录整个目标的运动变形情况,也不需要特别复杂的光学系统,成本较低。故基于图像的测量可以比较方便地对全局变形进行测量,在位移及应变的测量中地位的越来越重要。通过多相机耦合测量得到的三维计算机视觉,可以测出平面外位移场,得到三维变形信息。在实际应用中发现,需要精确计算位移等参数时,图像运动分析结果会受到很多因素的影响产生偏差,从而对测量结果产生较大的误差[7]。
文章对视频分析的影响因素进行考虑,基于一种摄像标定方法对视频分析影响进行研究,重点探讨相机焦距和相机俯仰角对摄像分析结果的影响,并通过试验进行应用,提高了视频分析精度。
2 视频分析原理及模型
在图像分析时,为了获取视频中分析点的位置信息,需要得到二维图像坐标与三维物体坐标的关系,建立成像模型[8]。高速相机是一个典型的光电装置,收集来自物体的光,并将图像聚焦到传感器平面上,当使用电荷耦合器件(CCD)相机获取数字图像时,入射光被转换成电信号,最后将CCD信号转换成一组离散的数字强度数据进行存储,进而得到视频用于分析[9]。
2.1 成像模型
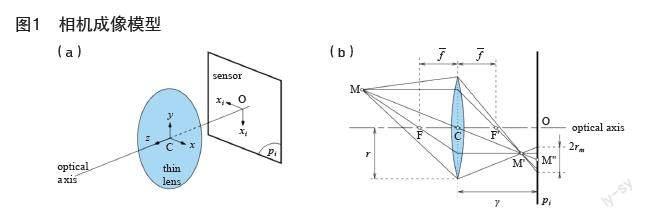
针孔成像模型如图1(a)所示,由单一的理想透镜组成。传感器平面系统的中心O是主点,位于与光轴的交点处。坐标系原点为C,沿光轴方向为+z,指向物体。根据小孔成像原理,在成像过程中会反演,因此传感器平面通常采用倒坐标系。物体点M为在镜头系统中的坐标;透镜中心C,位于与光轴的交点处前方;物体焦点F,位于距离Cz = +f处用于成像的薄透镜;理想像点M′,位于光线的最佳焦点;物体点M在传感器平面上的图像点为M'';传感器平面到透镜中心的距离为γ。
如图1(b)所示的成像过程通常与针孔相机模型相关。一般M的理想图像位置可能与传感器平面位置不对应。在实际过程中,M在传感器平面上的图像会有轻微的模糊、放大和移位。使用位于镜头中心C的坐标系和位于(x,y,z)的物体点M,成像过程将M转换为理想像点M',镜头坐标系到世界坐标系之间的关系,使用如下公式1.1。
其中,?为焦距。
一般二维计算机视觉常采用针孔相机模型,假定物体的运动发生在一个平面内。在大多数二维情况下,需要物体平面名义上平行于相机传感器平面。而在3D计算机视觉中,物体运动的唯一限制是物体在运动期间始终需要保持在相机焦点上,成像到两个或多个相机传感器平面上。
2.2 相机标定
物理上,当图像位置与针孔模型预测不匹配时,在使用针孔模型预测图像位置时可能产生扭曲,会发生畸变,导致产生巨大的测量误差,在试验要求精度很高时,必須正确建模、测量和充分消除基于图像的测量中的畸变[10]。
因此,可以在使用进行针孔模型预测之前引入畸变模型。由于数字化传感器图像是用于估算畸变的主要数据,因而更方便的方法(在数学上等效)是在执行针孔变换后执行畸变校正。图像畸变可以表示为针孔投影估计的变换,将理想的、无畸变的图像点映射到真实的畸变位置。一般来说,有两种主要的方法被用来量化图像失真。第一种方法是目前使用最广泛的方法,通过在针孔模型中添加失真向量项来模拟失真,这种方法通常适用于复杂的高度参数化非线性相机模型[11]。参数化模型通常用于模拟简单透镜系统中的畸变。如下所述为文章所采用的为透镜畸变模型。
设(x,y)为未校正的像素坐标。这些坐标直接指向图像,作为计算的输出。校正的像素坐标(x',y'),这是一个近似的理想相机的画面坐标。使用归一化坐标(X,Y)和(X',Y')进行校准计算,如下式公式1.3:
其中(x0,y0)为主点,R0为算法比例因子。修正坐标与未修正坐标之间的关系由式1.4给出:
其中:
是到主点的距离。
当校正坐标是已知的时,通过上式可以计算出未校正坐标,dX和dY是作为校正坐标X'和Y'的函数给出的。通常情况下,不校正坐标(轨迹的输出)是已知的,并且需要对畸变进行补偿。通过迭代计算来反向求解方程,首先计算理想无畸变的情况下,五个内参和六个外参,然后应用最小二乘法计算实际存在径向畸变下的畸变系数,利用极大似然法优化,提升估算精度。
在上面的公式中,dr项只取决于到主点的距离,是围绕光轴径向对称的,被称为径向畸变。径向畸变项描述了这样一个事实,即图像的尺度随两者之间的角度略有变化入射光线和光轴(在理想的相机中,整个图像的比例是恒定的)。这通常是失真的主要部分。
对于大多数透镜来说,径向畸变随r的变化相当缓慢,它可以用多项式的前两项精确地近似。涉及系数B1和B2的项称为切向畸变。切向畸变大多是由透镜元件没有完全对齐引起的,这导致透镜系统不是径向对称的。切向畸变通常比径向畸变小得多。在许多情况下,切向系数B1和B2可以设置为零而不影响结果的准确性。
3 试验设计与结果分析
3.1 试验方案设计
在试验中,确定分析用的目标平面以及目标点位,将其在固定墙壁上,放置相机,保持相机到目标平面的距离相同,首先对相机进行标定,通过镜头标定对视频分析点位误差的影响,然后使用控制变量法分别对相机镜头焦距以及摄像头角度两因素对试验结果造成的误差进行分析。将三坐标设备得到的测量值作为目标点位的实际值,将通过视频分析获得的值作为计算值,坐标原点为平板中心,以各点位X轴坐标值来进行误差分析。
3.2 相机标定的影响
使用定焦镜头为6 mm的相机采集相关数据,并对相机进行标定,得到的结果如表1所示。
通过对数据分析发现,由于相机镜头畸变的影响,进行数据分析时,相机边缘点的误差比镜头中央区域的大得多,中间区域的结果相对较准确;然后经过对镜头标定前后分析点位结果比较发现,相机镜头的标定对误差消除有显著的提升。
3.3 相机焦距的影响
在都经过相机标定后,保证摄像角度一致,即相机与目标平面垂直为0度时,只改变相机焦距,视频分析获得相机焦距分别为2.7mm、3.5mm、6mm的计算值如表2所示。
经过对试验结果的分析发现,2.7mm焦距的镜头由于相机畸变效应影响过大,导致数据严重失真,采集的视频不适合用于视频分析;3.5mm和6mm定焦镜头经过标定后都能较好的减小畸变的影响,提高分析的精度。
3.4 相機俯仰角的影响
在实际的视频采集中,不可避免会出现安装相机镜头不垂直的情况,现对相机俯仰角对视频分析的影响来进行研究,保证相机焦距一致,改变摄像头俯仰角。3.5mm定焦镜头在视频采集中常用到,故选用此焦距的定焦镜头,分别调整相机俯仰角度至0°,-2°,-4°,2°,4°,得到的计算值如表3所示。
当镜头焦距一致的情况下,随着镜头俯仰角的增加,分析点位的误差越大,但还是边缘区域的误差比中间区域大的多,在需要进行视频分析时需要尽可能保证相机镜头的垂直度。在常规实验项目中,采集画面时尽可能使目标点位的移动轨迹在视野中央,保证偏移尽可能小。
3.5 误差分析
为分析相机标定与否、相机焦距以及相机俯仰角对视频分析的影响,试验对比了不同工况下点位实际值和测量值的误差,如图2(a-c)所示。由图2(a)可知,标定后相机在不同点位的误差值均显著降低,说明相机标定能明显降低视频分析误差。由图2(b)可知,经过标定后的3.5mm和6.0mm的镜头在不同点位的误差值均较小,采集的视频有较高的精度,可用于视频分析,而2.7mm的定焦镜头由于镜头畸变导致误差较大,采集的视频无法作为分析数据。由图2(c)可知,随着俯仰角增加,分析点位的误差值越大,当镜头俯仰角为0°时采集的数据误差最小。
综上可知,在进行高速视频数据采集前,应对相机进行标定,尽可能的保证相机镜头垂直于待测区域,采集画面时尽可能使待测区域在视野中央,应选择标定后的3.5mm和6.0mm的镜头以保证试验采集数据的精度。
4 应用分析
高速摄像视频分析作为一种新兴的检测手段,在汽车安全检测领域得到了广泛的应用,如实车碰撞试验和座椅动态试验等。文章根据企业标准要求,对座椅进行动态试验分析,并在加速滑台开展座椅动态试验。为验证座椅结构的安全性,需对座椅部件及假人各部位位移进行监控,模拟在实车碰撞中的状态。假人骨盆在X方向和Z方向及滑轨位移都有相应的限值要求。试验前需布置好高速相机,并对相机进行标定,然后测量参考平面到高速相机镜头距离,和参考平面上X、Z方向上参考点之间距离。
使用的Q1m相机拍摄帧率设置为1 000帧/秒,分辨率为1280×1024,试验如图3(a)所示。应用高速摄像对假人骨盆位移进行测试,并与试验前各点位的三坐标测量值建系后点位坐标比对误差在2mm以内,最后得出在X方向测试结果曲线如图3(b)所示。表面经过标定后测试结果精度更高,分析结果更加准确。
5 总结
文章基于相机标定和视频分析的基本原理,将其应用在汽车安全检测领域内的典型案例中,并与移动三坐标设备测量数据进行对比,分析标定后相机采集数据具有较高的精度,说明其在汽车碰撞测试领域的有效性;同时分析了相机镜头焦距以及摄像头角度对试验精度的影响,指出了视频分析应用在汽车碰撞检测领域内的典型场景和适用范围,以期为相关领域的研究人员提供一定的参考。
参考文献:
[1]岳浩.视频检测中的相机标定方法研究[D].武汉:华中科技大学.
[2]唐崇伟.接触轨检测中摄像机标定的分析与研究[D].成都:西南交通大学,2012.
[3]汤溢,陈曦,刘祥磊.OpenCV的相机标定在高速相机中的应用[J].北京测绘,2018,32(5):5.
[4]张耘强,蒋硕,何闻莺,等.单目摄像机标定参数的确定[C]重庆汽车工程学会2019年论文汇编.2019.
[5]雷秀军.高速视觉动态测量系统关键技术与应用研究[D].合肥:中国科学技术大学,2016.
[6]刘学谨.基于高质量图像获取的高精度摄像测量方法[D].北京:北京理工大学,2016.
[7]马鑫.高速运动目标多维姿态视觉测量关键技术研究[D].大连:大连理工大学,2017.
[8]谢正帅,颜旭,肖桐,等.平面标定法在闪电光学观测中的应用[J]. 热带气象学报, 2022, 38(3):9.
[9]肖玉洁,黄昶,张婷.摄像机标定技术综述[J]. 通讯世界月刊,2015.
[10]冯亮,谢劲松,李根,等.摄像机标定的原理与方法综述[J]. 机械工程师,2016(1):3.
[11]陈珂.用于视频中车速自动检测的摄像机自动标定方法[J]. 计算机应用,2017,37(8):7.