
基于磁流变阻尼器的滚珠丝杠进给系统主动抑振研究
2024-04-17 09:12张忠奎高峰李艳张晗闫洋洋
机床与液压 2024年5期
张忠奎,高峰,李艳,张晗,闫洋洋
(1.潍坊科技学院,山东省农机装备用材料工程高校特色实验室,山东潍坊 262700;2.西安理工大学,教育部数控机床及机械制造装备集成重点实验室,陕西西安 710048;3.深圳迈瑞生物医疗电子股份有限公司,广东深圳 518055)
0 前言
滚珠丝杠进给系统具有刚度大、精度高等特点,因而在精密机床中得到广泛的应用[1-3]。但是滚珠丝杠进给系统的非线性摩擦和振动问题严重制约了精密或超精密加工的定位精度和效率,从而影响工件的加工质量,降低了系统的加工性能[4-5]。通过改善工作台和导轨之间的表面润滑情况可以降低导轨副之间的摩擦,降低工作台的振动。提高滚珠丝杠传动系统的加工精度和装配精度,降低配合误差也能够提高进给系统的精度,降低工作台的振动。还有一些学者通过外加阻尼的方式增大系统的阻尼而达到减小振动的目的。王伟[6]通过改善进给系统的阻尼解决了进给系统的自激振动问题。江早等人[7-8]通过阻尼油膜改善了滚珠丝杠进给系统和主轴系统的振动特性,降低了振动误差。但是这些都是滚珠丝杠进给系统被动抑振的方法,被动抑制技术的劣势越来越凸显。随着装备性能高精密极端化发展的趋势,基于智能流体的机械装备的主动抑振应用越来越广泛。磁流变液是一种新型智能材料,在不同的磁感应强度下,其剪切屈服应力也随之发生变化[9-10]。磁流变液阻尼器是以磁流变液为工作介质的智能控制装置,借助于磁流变液剪切屈服应力随磁感应强度变化而变化的性质,在不同的电流下,输出阻尼连续可调。因此许多学者将磁流变阻尼器智能装置引入机床行业,通过增大系统的阻尼实现了滚珠丝杠进给系统的主动振动控制[11-13]。
磁流变阻尼器作为一种主动阻尼的智能控制元件,大部分学者将磁流变阻尼器用于滚珠丝杠进给系统的抑振,只是定性论述了通过增大磁流变阻尼器的阻尼控制系统的振动,没有定量分析阻尼器电流参数与振动幅值的关系。鉴于此,本文作者首先设计了滚珠丝杠进给系统抑振用磁流变阻尼器,在阻尼特性试验的基础上,基于最小二乘法和BP神经网络参数辨识拟合,得到阻尼力性能曲线;然后将磁流变阻尼器应用于机床滚珠丝杠进给系统的主动抑振,定量计算了磁流变阻尼器输入电流引起的系统阻尼的变化与系统振动幅值的关系,证明了磁流变阻尼器输出阻尼对机床滚珠丝杠进给系统振动抑制效果良好。
1 磁流变阻尼器设计及阻尼特性试验
1.1 磁流变阻尼器结构设计
图1所示为设计的磁流变液阻尼器。在外力的作用下,活塞沿缸筒移动,迫使磁流变液在阻尼通道内流动。由流体纳维斯托克斯方程知,阻尼器阻尼通道两端产生压力差,从而产生阻尼力[14]。

图1 磁流变阻尼器结构
根据磁流变阻尼器的结构,输出阻尼力表达式[15]为
FMR=cev+FI
(1)
式中:ce是磁流变液的阻尼系数;FI是库仑阻尼力。
(2)
式中:k为黏度系数;l为阻尼器阻尼通道有效长度;D为缸体内径;Ap为活塞有效面积;Dh为活塞阻尼孔直径;v为活塞速度。
1.2 磁流变阻尼器阻尼特性试验
图2所示为磁流变阻尼器阻尼特性试验装置。利用自制固定夹具将阻尼器活塞杆端固定在伺服控制材料试验机的上端,下端由材料试验机自带夹具固定。通过DP821电流控制器改变磁流变阻尼器的输入电流,使磁流变阻尼器输入电流的变化范围为0~1.0 A,间隔0.2 A;采集不同电流多组工况下的阻尼力、位移和速度数据,利用最小二乘法对阻尼数据进行处理。为了避免使用最小二乘法时由于初值选择导致的误差[16],本文作者将采用BP(Back-Propagation)神经网络对辨识后的阻尼数据进行验证,获得如图3所示的磁流变阻尼器的阻尼特性曲线,当电流达到1.0 A时,阻尼力趋向于饱和。

图2 磁流变液阻尼器试验装置
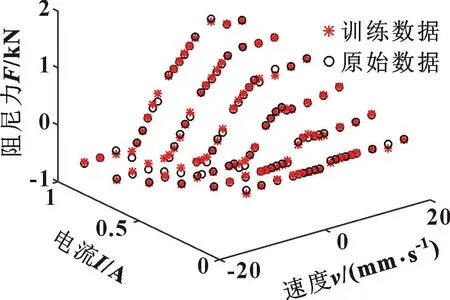
图3 磁流变液阻尼器阻尼特性曲线
2 滚珠丝杠进给系统动力学模型
设计带有磁流变阻尼器的滚珠丝杠进给系统,如图4所示。磁流变阻尼器通过夹具固定在导轨上,工作台移动带动阻尼器活塞运动,从而增大系统阻尼,抑制工作台的振动。将联轴器、螺母、轴承等效成弹簧阻尼单元,工作台等效成集中质量单元,建立如图5所示的滚珠丝杠进给系统等效动力学模型。ke、kg、kn、klb、krb、kc和ce、cg、cn、clb、crb、cc分别为磁流变阻尼器、导轨、螺母、左轴承、右轴承和联轴器的刚度和阻尼。

图4 磁流变阻尼器滚珠丝杠进给系统示意

图5 滚珠丝杠进给系统动力学模型
工作台做轴向运动时,动力学方程为
(3)
式中:Fs为弹性力;Ff为摩擦力;Fc为结构阻尼力;Fd为驱动力;FL为负载。刀具对工件的切削力具有周期性的变化规律,因此:
Fd-FL-Ff=Fcosωt
(4)
把磁流变阻尼器方程(1)代入方程(3)得到如式(5)所示的系统进给方向的单自由度模型动态方程,如图6所示。
(5)

图6 滚珠丝杠进给系统单自由度模型
基于Runge-Kutta(龙格-库塔)法求解的系统响应如图7所示。
由图7可知:当输入电流0、0.2、0.4 A时,磁流变阻尼器输出阻尼较小,系统响应先是快速减小,随后趋向于平稳;当磁流变阻尼器输入电流0.6、0.8、1.0 A时,磁流变阻尼器输出阻尼较大,系统响应快速趋向于平稳。
图8所示为磁流变阻尼器输入电流0、0.2、0.4、1.0 A时,系统振动的幅频曲线。随着磁流变阻尼器输入电流值的增大,滚珠丝杠进给系统阻尼增大,系统振动幅值减小,磁流变阻尼器增大了系统阻尼,抑制了系统的振动幅值。
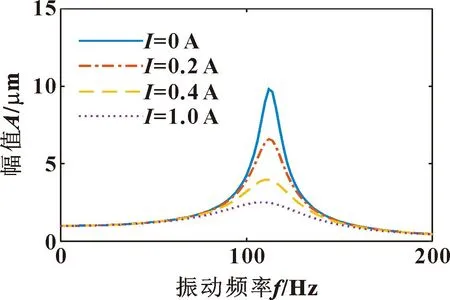
图8 不同电流下滚珠丝杠进给系统幅频曲线
3 磁流变阻尼器抑制滚珠丝杠进给系统振动试验验证
为了验证磁流变阻尼器对滚珠丝杠进给系统的振动抑制情况,搭建带有磁流变阻尼器的滚珠丝杠进给系统试验平台,通过DP821电流控制器调节磁流变阻尼器的输入电流,从而调节了滚珠丝杠进给系统的阻尼,如图9所示。经试验测得当输入电流达到0.6 A时滚珠丝杠进给系统振动幅值达到最小。DEWEsoft动态测试仪采集的加速度信号,经过MATLAB软件处理得到如图10所示的时域振动时程图,经过傅里叶变换计算得到如图11所示的频谱图。

图9 磁流变阻尼器滚珠丝杠进给系统试验装置

图10 时域振动时程图对比
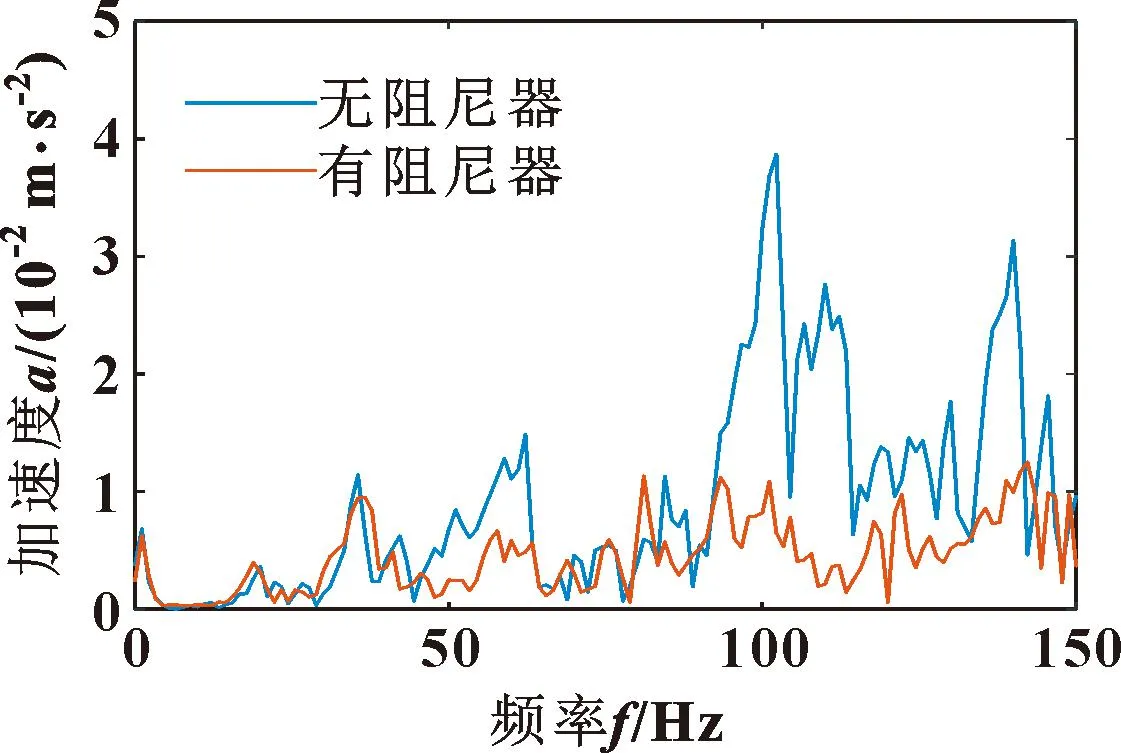
图11 振动频谱图对比
由图10和图11可以看出:磁流变阻尼器能够很好地抑制滚珠丝杠进给系统的振动幅值。
4 结论
针对滚珠丝杠进给系统轴向振动影响工件的加工质量和精度保持性的问题,将磁流变阻尼器应用于机床滚珠丝杠进给系统轴向抑振,建立了带有磁流变阻尼器的机床滚珠丝杠进给系统单自由度振动模型,最后试验验证了磁流变阻尼器抑制滚珠丝杠进给系统的振动。得到如下结论:
(1)由磁流变阻尼器的阻尼特性试验知,当输入电流达到1.0 A时,阻尼力趋向于饱和。
(2)当磁流变阻尼器输入电流0.6 A时,滚珠丝杠进给系统抑振效果达到最佳,当电流继续增大时,系统处于过阻尼状态振动幅值反而增大。
(3)选择合适的输入电流,磁流变阻尼器能够很好地抑制滚珠丝杠进给系统的振动,因此通过磁流变阻尼器抑制滚珠丝杠进给系统的振动是可行的。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
北京理工大学学报(2020年11期)2020-12-15
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2017年8期)2017-11-27
邢台学院学报(2016年4期)2016-02-28
太原理工大学学报(2015年3期)2015-12-17
深圳职业技术学院学报(2015年5期)2015-11-30
机械制造与自动化(2014年1期)2014-03-01
