TOFD图像中焊缝埋藏缺陷的智能评定与分级
2024-04-17 06:14:12余焕伟任绪凯廖晓平欧阳星峰杜锡勇
中国特种设备安全 2024年3期
余焕伟 任绪凯 廖晓平 欧阳星峰 杜锡勇
(1.绍兴市特种设备检测院 绍兴 312071)
(2.绍兴市特种设备智能检测与评价重点实验室 绍兴 312071)
(3.浙江德力装备有限公司 绍兴 312599)
1 引言
TOFD(衍射时差超声检测)具有可靠性好、检测效率高、可记录等优点,其测量精度能够控制在±1 mm[1],对焊缝中裂纹类缺陷检出效果明显,在大型承压设备的无损检测中发挥着不可替代的作用。随着TOFD 成像技术的迅速发展和普遍应用,其正逐步替代射线检测成为焊缝质量评价的主要手段[2],得益于爬行机器人的不断成熟,高度自动化的TOFD 扫查成像已在推广应用,但是在对TOFD 图像的自动判读和释义方面仍存在巨大技术障碍,成为制约全自动化TOFD 检测技术发展的瓶颈。虽然现在的商业化TOFD 设备一般会提供离线分析软件,但这类软件自动化程度低,大多需要检测人员手动确定直通波和底波位置来校准图像,再通过拉线的方法进行缺陷测量,最后再结合人工经验进行缺陷评定与质量分级,整个过程要消耗检测人员大量的精力和时间,而且还存在误判的可能。
针对上述问题,国内外学者也进行了一些研究,如Zhu H J 等[3]将TOFD 图像分为多个图像块,采用基于大律法(OTSU 法)的局部最优阈检测图像中的裂纹边缘;王燕等[4]采用图像形态学处理和Hough 变换相结合的方法对TOFD 图像进行自动快速标定;Merazi-Meksen T 等[5]利用分水岭方法实现对TOFD图像的区域分割和缺陷轮廓提取;陈欣[6]在直通波峰值捕捉前引入改进的霍夫搜索算法,提高了标定结果的准确性和处理效率。在TOFD 缺陷分类与定性识别方面,一般是先提取缺陷图像特征再进行模式识别或模式分类,常见的TOFD 图像特征参数有图像纹理特征[7]、缺陷区域图像统计参数[8]、小波能量特征[9]、傅里叶频谱系数[10]等,模式识别方法有主成分分析[11,12]、支持向量机、深度学习[13]等。上述研究中,TOFD 图像标定和缺陷分割等方面的相关算法的自适应能力、自动化较弱,不适合在工程上推广应用,虽然缺陷定性识别方法对特定缺陷信号具有较好的识别率,但受制于缺陷训练样本数量及标注准确性的影响,对复杂场景下缺陷的识别率还较低。
2 TOFD 图像的自动分区与标定
2.1 TOFD 图像结构特点
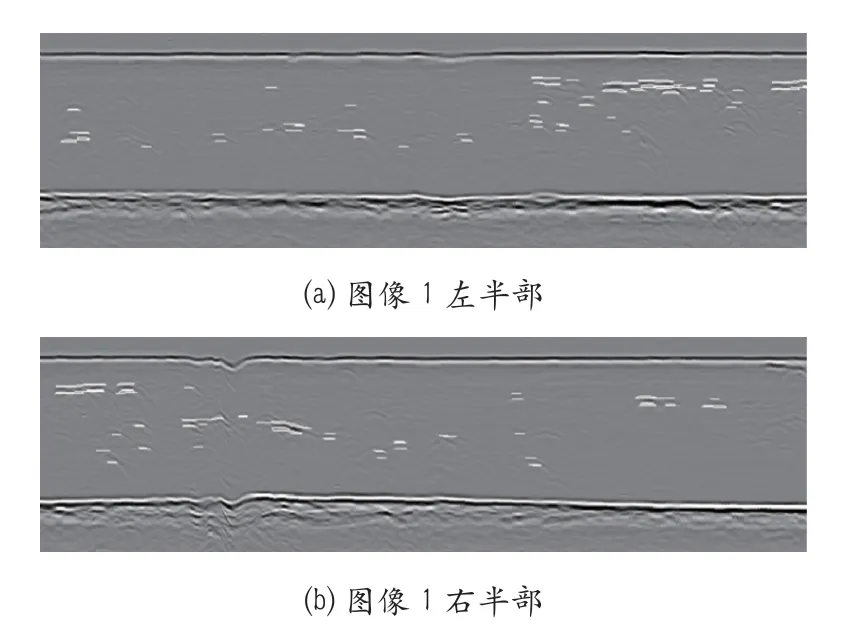
典型的TOFD 图像如图1 所示,直通波、底波和底面反射横波这3 条近似水平线将图像分割纵波衍射区域、波形转换区域,而对缺陷的定位和分析主要集中在纵波衍射区域。在TOFD 扫查时,由于探头延时误差、耦合面力度不均、探头中心间距PCS波动等的影响,上述区域位置可能产生变化,影响后续缺陷定量精度,因此在图像分析前需要先进行标定。传统标定方法是借助TOFD 仪器自带的离线分析软件进行的,首先观察确定图1 所示的几个区域,然后再手动对直通波第一个波峰及底波第一个波谷进行定位标记,基本原理如下:假设直通波到达时刻为t1,底波到达时刻为t2,探头延时为t0,纵波声速为c,工件厚度为D,如图2 所示,直通波和底波之间的时间差Δt=t2-t1,S为探头中心间距PCS的1/2,声程差cΔt可由式(1)得到,只要给出∆t、D、PCS中任意两个就可以求解第三个。

图1 典型TOFD 图像分解

图2 直通波与底波之间的声程差示意图
2.2 TOFD 图像自动分区算法
TOFD 图像中直通波、底波与背景在灰度上存在较大差异,本文采用OTSU 阈值分割算法对TOFD 图像进行二值化处理。OTSU 阈值分割算法采用的是最大类间方差图像分割方法,图像前景和背景之间的类间方差如果越大,就说明构成图像的两个部分之间的差别越大,当所取阈值的分割使类间方差最大时就意味着图像错分概率最小,具体步骤如下:假设图像的总像素数为A,初始灰度阈值为k,灰度k及以下的像素数为Bk,大于灰度k的像素数为Ck=A-Bk,图像的全局灰度均值为μ,i为灰度级数(0 ≤i≤255),pi为处于灰度级i上的像素数。
阈值k把图像分为Bk和Ck两部分,其灰度平均值bk和ck分别为:
令ω1=Bk/A和1-ω1,由式(2)、式(3)可得Bk与Ck的类间方差σ2为:
阈值k遍历0 ~255 灰度级可得使σ2最大时的最佳分割阈值kmax,对图3 所示的TOFD 图像进行OTSU阈值分割,最优阈值kmax=176,结果如图4 所示。

图3 TOFD 原始图像
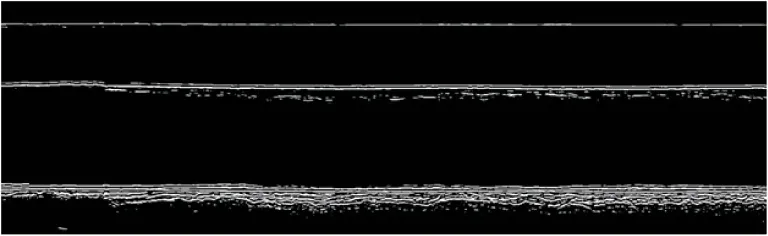
图4 OTSU 阈值分割后的二值化图像
图4中直通波、底波、底面横波回波已与背景分离,对图4 进行形态学开运算,选择像素长度为100的水平直线作为结构元素,消除细小不连续的线条,如图5 所示,选择相同的结构元素,再对图5 进行形态学闭运算,连接断开的直线,如图6 所示,至此只需要检测出直线位置即可确定TOFD 图像的几个关键区域。Hough 变换的原理是利用笛卡尔坐标系中的直线与Hough 参数空间中的点的对应关系,将直线或曲线从图像空间中转换到Hough 参数空间,转换后的直线在参数空间映射成为一个峰值点,直线检测的问题就转换成在Hough 参数空间中求共线点的累加峰值的问题[14]。利用Hough 变换直线检测算法在图6 中进行直线检测,并根据TOFD 图像的特点进行以下限制:1)舍弃长度小于100 像素的短线段;2)当线段之间的距离小于100 像素时,这些线段合并为一条线段;3)直线的水平度在±1°之内。直线检测结果如图7 所示,根据这些直线的行像素坐标即可大致定位TOFD图像的直通波、纵波衍射区和底面反射波。
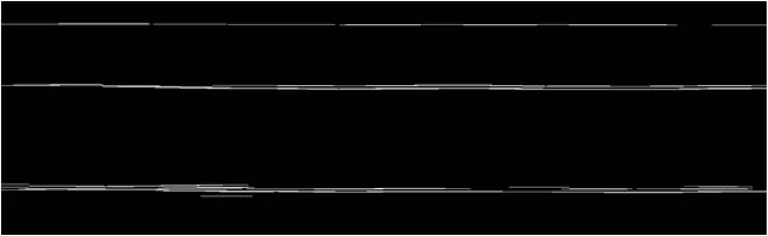
图5 形态学开运算结果
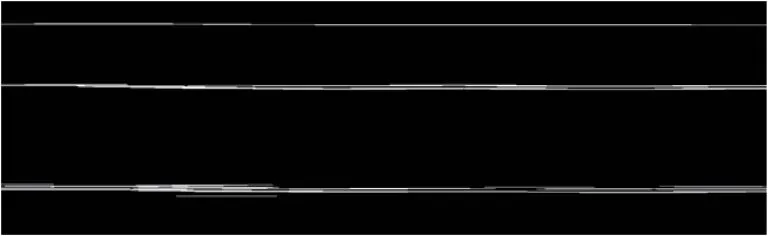
图6 形态学闭运算结果
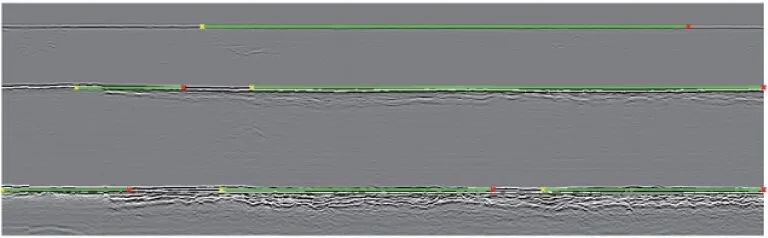
图7 Hough 变换直线检测结果
2.3 TOFD 图像自动标定算法
TOFD图像标定需要精确定位A扫信号中的波峰、波谷位置,本文采用“局部极值-阈值”搜索算法在直线附近进一步定位直通波和底波中波峰、波谷的位置,即先搜索A 扫信号的波峰和波谷,并判断后续搜索点是否达到一定阈值,只有满足设定的阈值条件,先前确定的极值点才能被认定为波峰或波谷,经过实验以灰度平均值的4/5 作为截止阈值。假设TOFD 图像大小为M×N,行数M代表A 扫信号采样长度,列数N代表A 扫信号数个数,与TOFD 扫查长度相关。通过上述“局部极值-阈值”搜索算法对第j个A 扫信号中与Hough 直线相对应的位置附近搜索,得到直通波第1 个波峰LPj和底波上第1 个波谷BTj,记直通波与底波之间的像素差LBj=LPj-BTj。由于TOFD 扫查时的表面耦合情况变化以及TOFD 数据采集时的随机误差影响,得到的N个LB并不都相等,本文以LB重复次数最多、概率最大时的值作为TOFD 图像直通波与底波之间的行像素差,以此时直通波波峰位置平均值LPM作为校正缺陷深度的基准值。根据TOFD 成像原理,可得图3 中相邻像素行之间的声程差ΔRL见式(5)。
cΔt可由式(1)或者由直通波与底波的时差Δt得到。假设纵波衍射区任一点的行像素行号为i,则此点的深度Di可由式(6)得到,最终的TOFD 深度标定曲线如图8 所示。
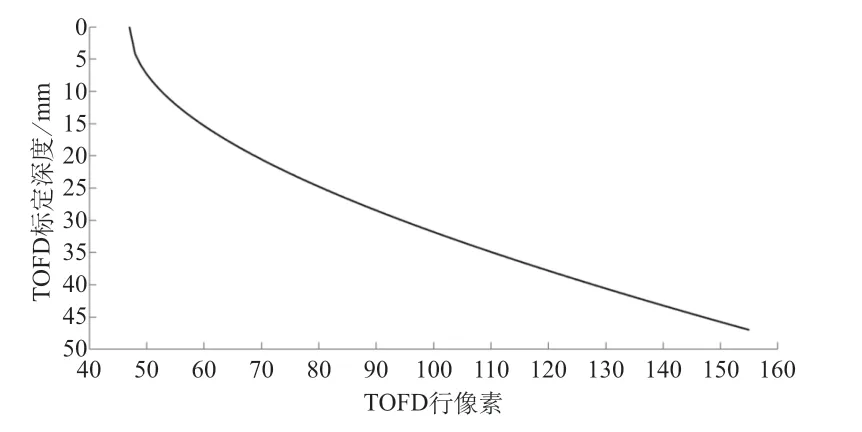
图8 TOFD 深度标定曲线
2.4 TOFD 图像有效性评价
TOFD 检测时比较关键的一步是设定合适的检测灵敏度,一般可通过在被检工件上将直通波的波幅调到满屏高的40%~80%进行设置,灵敏度过大或过小都将直接影响图像的质量及后续缺陷检出率,如图9 所示的3 条A 扫信号分别代表不同的灵敏度,图10为灵敏度过大的不合格图像。当前TOFD 图像有效性评价是由分析人员目视进行的,对图像灵敏度的检查存在较大的主观性,而且对于提高TOFD 图像分析的自动化程度来说,也需要寻找一种便捷、客观的图像灵敏度评价方法。自然图像质量评估方法(NIQE)不需要与参考图像进行比较,仅利用图像自身的统计特征来评估图像质量,可以对多种类型的失真图像进行准确评估[15]。具体来说,NIQE 算法先将原始图像分解成多个子带图像,再选取其中的图像显著特征区域建立多元高斯特征模型,最终得到原始图像的无参考图像质量指标,指标越小表示图像感知质量越好。
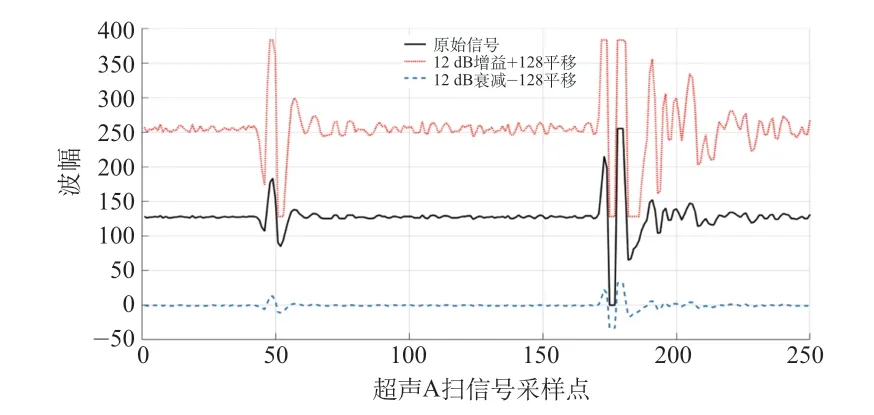
图9 不同灵敏度下TOFD 图像中提取的A 扫信号

图10 灵敏度过高时的TOFD 图像
对图3 中的TOFD 图像分别进行-12 dB、-6 dB、0 dB,6 db、12 dB 的额外增益,其NIQE 指标分别如图11 中虚线所示,随着额外增益的增大而增大,这是因为直通波、底面反射波等的存在掩盖了纵波衍射区的微弱图像信息差异。提取TOFD 图像的纵波衍射区,如图12 所示,再计算图像在-12 dB 至12 dB 额外增益下的NIQE 指标,如图11 中实线所示,可看出NIQE 指标对TOFD 图像的过增益比较敏感,可用来对TOFD 图像质量进行评价,合格的TOFD 图像的NIQE 指标一般不超过25。
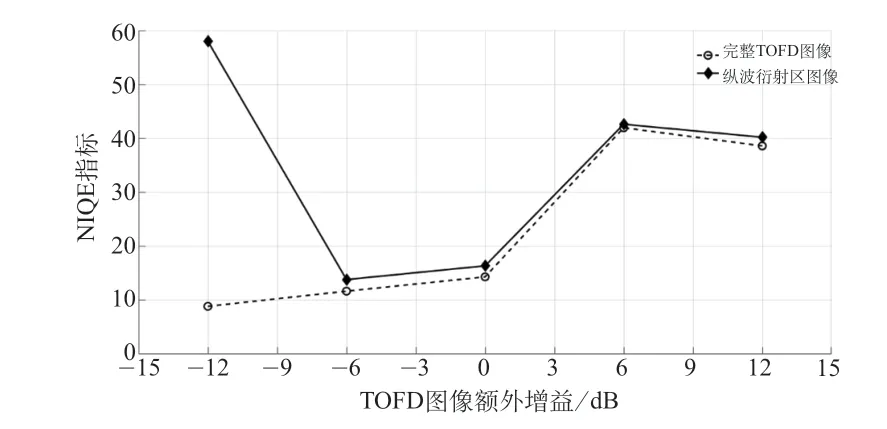
图11 不同灵敏度下TOFD 图像的NIQE 指标

图12 额外增益下的TOFD 纵波衍射区图像
2.5 TOFD 埋藏缺陷自动评定与质量分级
采用基于局部图像均值的自适应图像阈值分割法对图12(a)进行二值化,如图13(a)所示,选择像素长度为8 的水平直线作为结构元素进行形态学开运算和闭运算,消除不同缺陷图像之间的勾连和轮廓上的不平整,得到的缺陷区域图像如图13(b)所示。采用缺陷区域面积和圆度2 个几何特征对点状与非点状缺陷进行判断,点状缺陷需满足面积和圆度同时小于某一阈值。假设二值化图像中非点状缺陷的集合为NP,单一非点状缺陷的集合为SNP,需要合并显示的非点状缺陷集合为CNP,其中任意两个缺陷编号记为i、j,缺陷深度为Di、Dj,缺陷长度为Li、Lj,缺陷长度方向的间距记为LXij,高度方向的间距记为HZij,∆ij为缺陷i、j之间的行像素差,∆Peak为直通波中相邻波峰与波谷的像素差。对于相邻两个或多个非点状缺陷,按照NB/T 47013.10—2015《承压设备无损检测第10 部分:衍射时差法超声检测》的缺陷评定与质量分级规则要求,需根据其区域特征以及相互之间的几何位置关系判断是否作为一条缺陷处理。
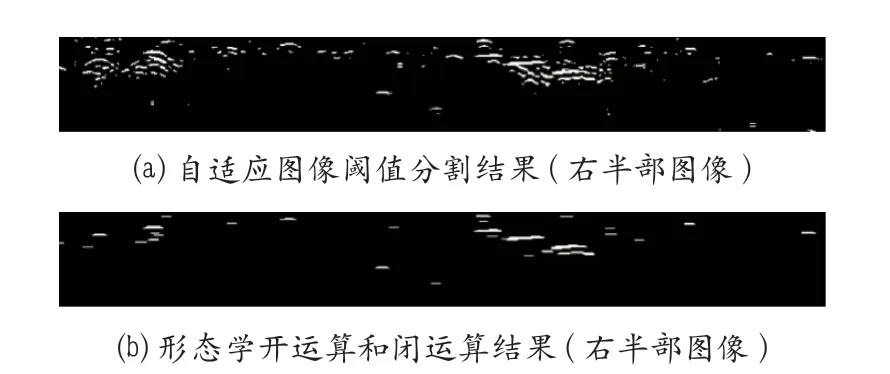
图13 TOFD 图像中缺陷区域提取
根据式(7)和式(8),缺陷i、缺陷j遍历非点状缺陷集合NP,可得到单一的非点状缺陷集合SNP和需要当作一条缺陷显示的缺陷对集合CNP,然后再对两个以上缺陷的合并显示情况进行判定,具体方法为:在缺陷对集合CNP中,对任意n个缺陷对c1,c2,…,cn进行比较,若c1∩c2…∩cn≠0,则该n个缺陷对合并进同一条缺陷进行显示。对于任意两个需要合并显示的缺陷i、缺陷j,假设缺陷高度为Hi、Hj,缺陷深度为Di、Dj,其在X方向上两端点的坐标分别为(xi1,xi2)、(xj1,xj2),则合并显示缺陷的深度D、长度L及自身高度H按以下规则进行计算:
1)合并显示缺陷的深度D=min(Di,Dj);
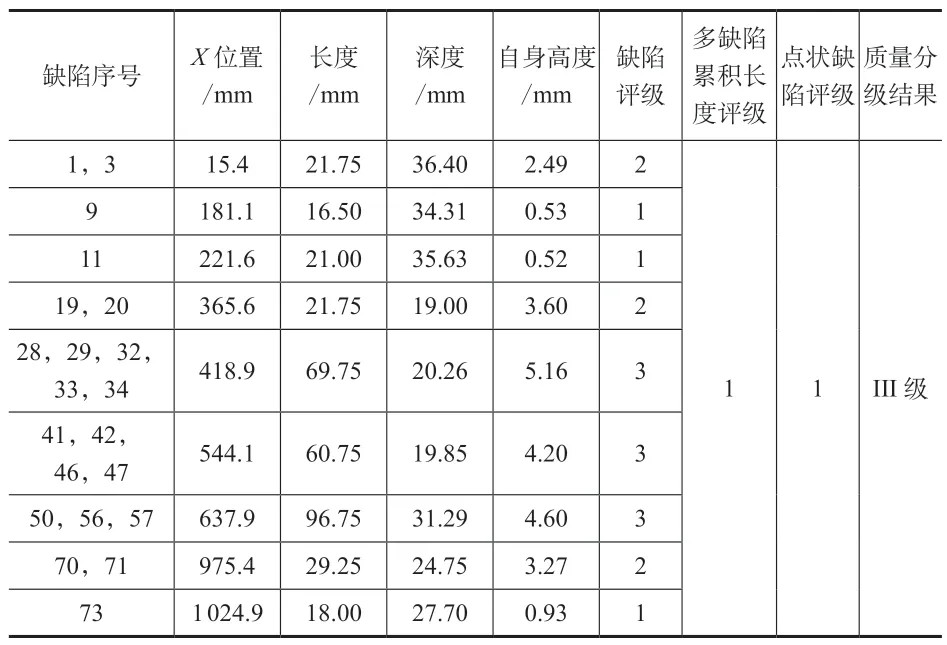
3)合并显示缺陷的高度H:L≥L1+L2时,H=max(Hi,Hj);L 依据NB/T 47013.10—2015 中焊接接头的质量分级规则,编制程序化的逻辑语言对自动检出焊接埋藏缺陷按点状和非点状缺陷进行分级,以质量级别最低的分级作为最终的质量分级。在点状缺陷分级时,需要划定100 mm 长度的评定区域,划定区域不同可能导致不同的评定结果,为减少人为因素的影响,本文采用“正逆滑动窗口”的方法来寻找包含点状缺陷最多的评定区域。假设焊缝上的点状缺陷X方向坐标依次为x1,x2,…,xN,N为点状缺陷总数,窗口宽度为100 mm,正向窗口从x1开始向X正向滑动,逆向则从xN开始反方向滑动,分别得到窗口正、逆向滑动时的点状缺陷数最大值PNum、NNum,则max(PNum,NNum)即为评定区域中最多可能包含的点状缺陷数NumMax。 TOFD 扫查实验图像1 和图像2 分别来自大型球罐上极板和人工焊接试块,板厚分别为47.0 mm、30 mm,PCS为115 mm、78.5 mm,检测灵敏度为67.0 dB、82.0 dB,采用单通道非平行扫查,扫查精度为0.75 mm、1 mm,扫查长度约为1 100 mm、270 mm,TOFD 探头中心频率均为5 MHz。利用前文提出的软件算法对TOFD 图像进行自动评定与质量分级,本文软件自动分析结果分别如图14、图15 和图16 所示,其中绿色标记点处为点状缺陷,红色方框内为单一缺陷,黄色方框内为合并显示缺陷。自动分析软件在图像1 中共评定出53 个点状埋藏缺陷、3 个非点状缺陷和6 个合并显示的非点状缺陷,在图像2 中共评定出13 个点状埋藏缺陷和2 个合并显示的非点状缺陷,自动质量分级结果见表1 和表2。 表1 TOFD 图像1 中的缺陷自动测量与分级 表2 TOFD 图像2 中的缺陷自动测量与分级 图14 TOFD 图像1 中的缺陷自动分割 图16 TOFD 图像2 中的缺陷自动评定 表3 为TOFD 图像的离线测量分析结果与本文软件自动分析结果的对比情况:对于TOFD 实验图像1,人工离线测量分析评出1 个3 级缺陷,而本文软件自动评定出3 个3 级缺陷。在最长的3 级缺陷(50,56,57)的起点位置、长度、深度、自身高度测量上,本文软件自动测量结果与人工离线测量的偏差分别为(-0.2%,-2.7%,9.8%,-9.8%),基本一致;对于TOFD 实验图像2 中的缺陷(5,6)和缺陷(11,12,14,15),2 种方法得到的缺陷信息与试块证书记载的缺陷信息符合较好,其中本文软件自动测量结果与试块证书记载的缺陷起点位置、长度、深度的偏差分别为(0.0%,2.8%,10.5%)和(-1.3%,7.0%,5.4%),与人工离线测量的缺陷自身高度偏差分别为11.5%、8.1%。上述偏差主要是由自动分析软件算法在缺陷分割环节对缺陷边缘像素增减造成的,但基本都在12%以内,而且不影响最终的焊接接头质量分级结果。 表3 TOFD 图像离线测量分析结果与本文软件自动分析结果对比 1)提出一套不依赖人工干预的埋藏缺陷自动评定与质量分级方法,包括TOFD图像智能分区、自动标定、图像灵敏度无参考评价、缺陷区域自适应分割、缺陷自动评定与质量分级等功能算法,具有不依赖人工干预、效率高等优点; 2)采用OTSU 阈值分割算法、Hough 直线检测方法,结合局部阈值峰值搜索算法和最大概率统计方法,可以智能识别直通波、纵波衍射区和底面反射波在图像中的准确位置,实现了对TOFD 图像的自动区域划分和自动标定; 3)结合TOFD 图像的形态学特点,采用自适应阈值分割技术和形态学运算方法对缺陷前景图像与背景图像进行分割和特征提取,并依据NB/T 47013.10—2015 实现了对焊缝中埋藏的点状缺陷和非点状缺陷进行自动评定与质量分级。3 实验结果及分析



4 结论
猜你喜欢
中华实用诊断与治疗杂志(2022年1期)2022-08-31 09:57:56
建材发展导向(2022年14期)2022-08-19 02:08:40
西藏艺术研究(2021年4期)2021-06-02 09:41:46
今日农业(2020年20期)2020-12-15 15:53:19
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
四川冶金(2017年2期)2017-04-11 12:55:36
光学精密工程(2016年3期)2016-11-07 09:03:34
体育科技(2016年2期)2016-02-28 17:06:01
创业家(2015年1期)2015-02-27 07:52:08