
基于单片机与LabVIEW的阴极保护智能监检测系统
2024-04-14 02:12周伟刘国桢王廷勇王辉
现代信息科技 2024年2期
周伟 刘国桢 王廷勇 王辉

DOI:10.19850/j.cnki.2096-4706.2024.02.012
收稿日期:2023-06-07
摘 要:文章针对海洋平台阴极保护智能监检测系统,采用单片机+HMI模式建立以太网通信,应用TCP通信协议采集保护阴极、牺牲阳极的电压信号与电流信号并做数据记录。阴极保护监测仪模块采集系统与模块进行通信,获取、解析数据并将数据存储至本地;阴极保护监测仪模块采集系统与上位机进行通信,上位机下发指令,模块采集系统通过相应指令将数据发送给上位机,实现海洋平台阴极保护电位、牺牲阳极发生电流、阴极极化电流的高保真转换和传输。
关键词:单片机;HMI;阴极保护;监检测系统;TCP
中图分类号:TP368 文献标识码:A 文章编号:2096-4706(2024)02-0050-04
Cathodic Protection Intelligent Monitoring and Detection System Based on
Single-Chip Microcomputer and LabVIEW
ZHOU Wei, LIU Guozhen, WANG Tingyong, WANG Hui
(SunRui Marine Environment Engineering Co., Ltd., Qingdao 266101, China)
Abstract: This paper focuses on the intelligent monitoring and detection system for cathodic protection on marine platforms, which adopts a Single-Chip Microcomputer+HMI mode to establish Ethernet communication. The TCP communication protocol is applied to collect voltage and current signals of the protective cathode and sacrificial anode, and record the data. The cathodic protection monitoring instrument module acquisition system communicates with the module to obtain, analyze, and store data locally; the cathodic protection monitoring instrument module acquisition system communicates with the upper computer, which issues instructions. The module acquisition system sends data to the upper computer through corresponding instructions, achieving high fidelity conversion and transmission of cathodic protection potential, sacrificial anode current, and cathodic polarization current on offshore platforms.
Keywords: Single-Chip Microcomputer; HMI; cathodic protection; monitoring and detection system; TCP
0 引 言
海洋屬十分苛刻的腐蚀环境,海洋平台等海工装备若不采取有效的防护措施,在短期内就会因腐蚀而发生损坏或失效。涂料+阴极保护技术是解决金属结构物在海水中被腐蚀问题的有效途径。阴极保护能够大幅降低海工装备的受腐蚀程度,提高装备服役过程的安全性,延长装备服役寿命。一些传统的监测方法(比如潜水员检测、ROV检测等)往往成本高昂,并且没有实时监测的功能,阴极保护监检测在这种情境下应运而生。阴极保护监检测可用于了解海洋平台的腐蚀状况,评估设备安全性,其中海洋平台导管架阴极保护监检测系统是较为重要的部分。
1 外加电流阴极保护
利用外加直流电源和辅助阳极的阴极保护,是使被保护的金属管路与直流电源的负极相连,设置辅助阳极与电源正极相连是使管路阴极极化以减轻或防止腐蚀的方法,又被称为“强制电流阴极保护”。其工作原理是:直流电源开启前,腐蚀电流从阳极流向阴极,阳极被腐蚀;电压开启后,腐蚀电流最先流向阴极,使之电位负向偏移,直至阴极阳极电位达到平衡状态,腐蚀电流消失。区分牺牲阳极的阴极保护法和外加电流的阴极保护法最基本的方法就是看看有没有外加电源,有外加电源就是外加电流的阴极保护法,没有外加电源就是牺牲阳极的阴极保护法。
外加电流系统对直流设备的要求如下:1)可靠性高。2)使用寿命长。3)维护保养简便。4)对环境的适应能力强。5)输出的电流、电压具有可调节性。6)具备防雷、过载及故障保护装置。
外加电流系统的优点如下:输出电压可以调节,可用来保护大型甚至没有防腐层的结构,土壤电阻率对其影响不大。
外加电流系统的缺点如下:1)一次性投入成本较高,日常维护需要可靠的外部电源,费用较高。2)对临近的构筑物存在腐蚀干扰,尤其是辅助阳极附近,需要定期检测是否对构筑物造成腐蚀干扰。3)阳极地床维修成本较高,产生的气体不易排出从而产生气阻,增大地床的电阻会影响地床的使用寿命。
外加电流的阴极保护是面向深水域环境友好的阴极保护方法。目前国内针对该方法的研究比较多,但关键技术还较为欠缺,还不够成熟,因此,亟须开发一套基于外加电流阴极保护的系统。
2 监检测系统简介
2.1 系统特点
该项目控制系统的设计特点如下:1)借助单片机使控制器与触摸屏结合而成海洋平台阴极保护监测仪,并将台式工控机作为上位机,将海洋平台阴极保护监测仪作为下位机,通过上位机采集监控下位机数据,实现海洋平台阴极保护电位、牺牲阳极发生电流、阴极极化电流的高保真转换、存储和传输。2)海洋平台阴极保护监测仪选用触摸屏工控机而不是常规触摸屏,可以存储数百GB的庞大数据,可进行长期记录和选择性删除历史数据,从而缓解了触摸屏存储空间小的弊端。3)在微软视窗操作系统下运行,采用Windows图形汉化界面,可提供人机对话功能,操作简便。检测系统可以对任何检测点的保护电位进行连续检测,检测时间频率在1~720分范围内(可由用户设定),能够对异常电位发出警报。4)采用自行设计开发的高精度数据采集模块进行数据采集,8路差分电压或电流模拟量输入,电压输入阻抗100 MΩ,通信接口RS485,波特率在1 200~115 200 bits/s之间,功率1.5 W。5)下位机触摸屏软件采用.Net6框架、C#语言,以WPF开发方式通过Visual Studio 2022开发而成,数据库采用MySQL/SQLite进行本地存储,通过与采集模块和服务器等元器件进行交互、调度实现对数据的采集、显示、上传等功能,采用WebAPI接口方式进行数据传输,采集模块数据实时回传至服务器,以此保证数据的安全性和实时性。6)上位机软件基于KLAB测试平台开发。上位机软件通过TCPSocket与下位机连接获取硬件数据,实现数据的显示、保存、积分运算、报警等功能。
2.2 硬件配置
海洋平台智能监检测系统的监测装置由水上部分和水下部分两部分组成。水上部分主要包括初始极化数据采集存储器及其密封箱与电源、阴极保护监测仪及其辅助设备(如UPS、动态补偿器等);水下部分主要包括复合参比電极、被监测阳极(包括测量电阻与绝缘法兰)、被监测阴极及发生电流检测器、护管、防水电缆和走线盒等。
海洋平台阴极保护监测仪由机柜、工业平板电脑、UPS电源、电源控制模块(开关电源/欠压过压保护器/浪涌保护器)、模拟量采集模块等组成,其中模拟量采集模块包括控制器、ADC数模转换器、存储器、RS-485通信模块、DC-DC转换器、MUX数据选择器等。电控柜电气原理图如图1所示,硬件电控柜内分布如图2所示。
2.2.1 单片机架构
系统以模拟量采集模块为核心,模拟量采集模块以ADI单片机为核心,由A/D模数转换取样模块、I/O隔离输入模块、存储模块、电源转换模块和串口通信模块组成。该系统具有以下特点:1)采用ADI单片机作为核心控制器,性能稳定可靠。2)模拟量采集模块能够对牺牲阳极以及保护阴极的电位电流等参数进行准确采集,并通过4~20 mA的电流信号传送至采集模块。3)I/O隔离输入模块能够将工业现场的控制开关量传送到单片机,隔离负载驱动模块输出相应的水泵控制信号。4)采用串口通信与GPRS上网相结合的方式,将采集到的信息传送到控制中心PC机,实现远程监控。5)该系统具有较高的精度和稳定性,适用于各种工业控制场合。
2.2.2 TCP通信配置
阴极保护监测仪模块采集系统与上位机进行通信,上位机下发指令,模块采集系统通过相应指令将数据发送给上位机。下位机用于存储转发数据,系统将模块数据汇总采集上来后,会将数据存储至本地,并将数据上传至上位机。下位机采用TCP通信,下位机与上位机都是采用TCP协议传输数据的,所以需要建立链路并加以维持。
一般步骤如下:1)上位机作为客户端,下位机作为服务端,上位机连接下位机。2)双方建立通信关系作为判断双方是否在线的依据。
对多种协议进行权衡,最终选择TCP字符串解析方式进行解析,避免粘包及数据混乱的问题,所有十六进制ASCII转换为“字符串”,各项以空格分隔,数据采用“,”分隔方便数据解析。
历史数据下发完成后,数据会根据间隔按条主动上传,直至数据全部上传完成。由于测试的实验数据过多,为避免正式运行时传输无用的数据,在下位机触摸屏上安装一个删除历史数据的软件,以此提高运行效率。
2.3 监测软件开发
LabVIEW是由NI公司开发的图形化界面编程软件,上位界面采用LabVIEW进行编写,通过TCP通信协议进行命令发送,并对采集到的数据信息进行存储。
上位机软件通信首先要将IP及接口与下位机保持在同一个网段,下位机软件需要与下位机的IP处于同一个网段内,软件通过TCP与下位机通信获取硬件数据,并实现数据的显示、保存、积分运算、报警等功能。
2.3.1 数据显示主界面
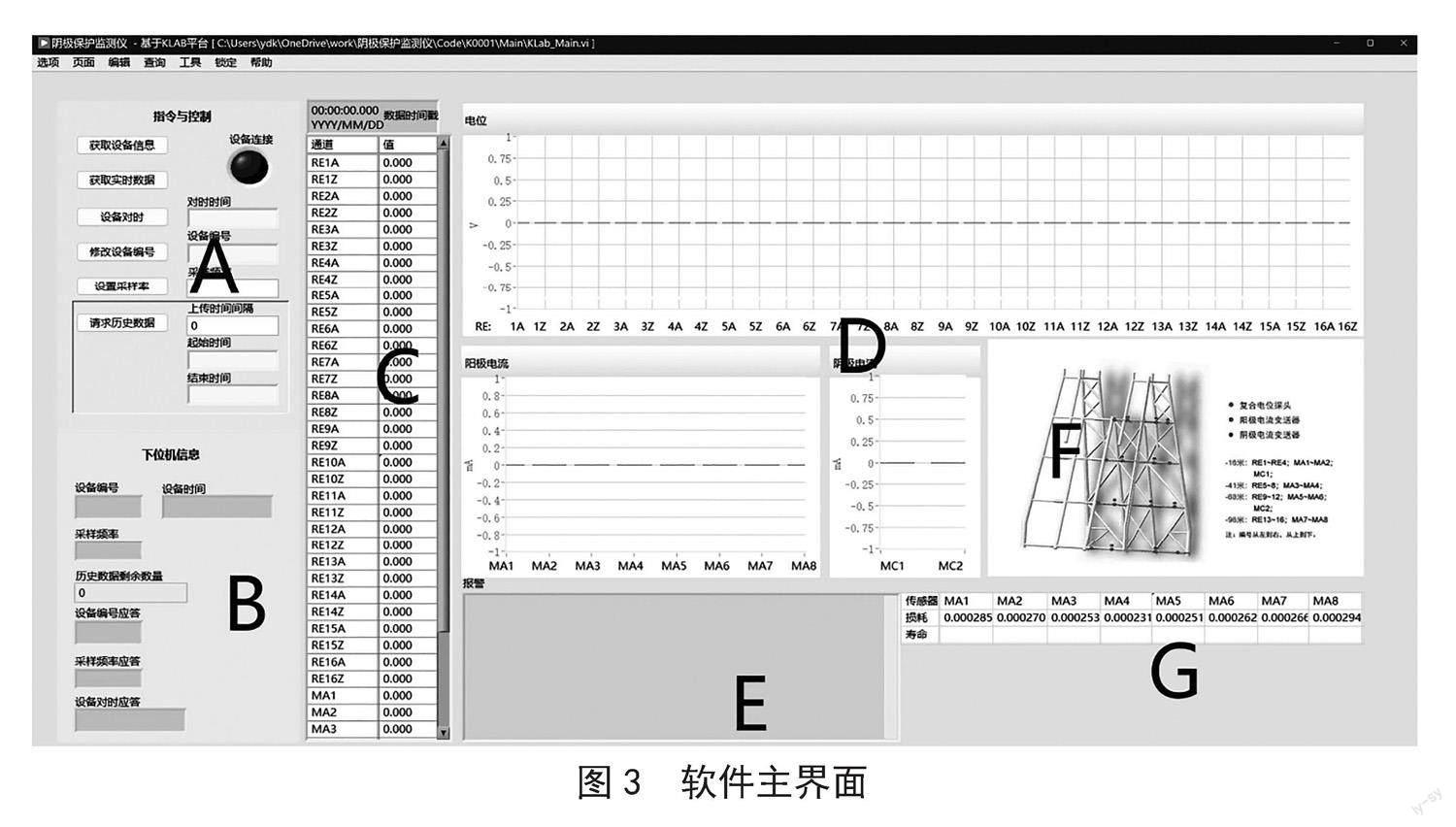
数据显示主界面如图3所示,主页面中详细说明内容如下:
A区域。下位机控制:用来显示下位机连接状态,向下位机发送指令等。设备连接:是一个指示灯,亮绿色代表下位机已连接获取设备信息。点击这个按钮可以在B区域查看下位机相关信息获取实时数据。点击这个按钮可以向下位机请求一次数据,数据会在C、D区域显示出来。注意如果下位机数据尚未准备好,则不会收到数据。设备对时:在后面的“对时时间”输入框中键入时间(例如20230131110559)后,点击按钮会进行下位机对时。如果输入框中无内容,则默认使用当前时间修改设备编号。在后面的“设备编号”输入框中输入新的字符(例如DEV123)后,点击按钮发送给下位机进行修改。注意编号必须是6字节,且不能有标点和中文。设置采样率:在后面的“采样频率”输入框中输入新的字符(例如1234),然后点击按钮发送给下位机。请求历史数据:在后面三个输入框中输入对应的三个参数后,点击按钮发送给下位机。
B区域。显示下位机收到指令后的应答:当A区域发给下位机的指令应答是数据时,应答直接显示在C区域和D区域,否则在B区域对应控件中显示应答结果。
C区域。下位机上报的数据以表格形式显示:超出阈值的通道会自动标红,显示上面的数据时间戳是下位机发送的数据所携带的时间,当发送的是历史数据的时候,这个时间可能会与当前实际时间不一致。
D区域。下位机上报的数据以图形形式显示。
E区域。下位机上报的数据超出阈值或发生模块故障时以文字形式显示出来。
F区域。传感器布局示意图。
G区域。截止到当前通过已接收的数据计算出来的损耗率和寿命。
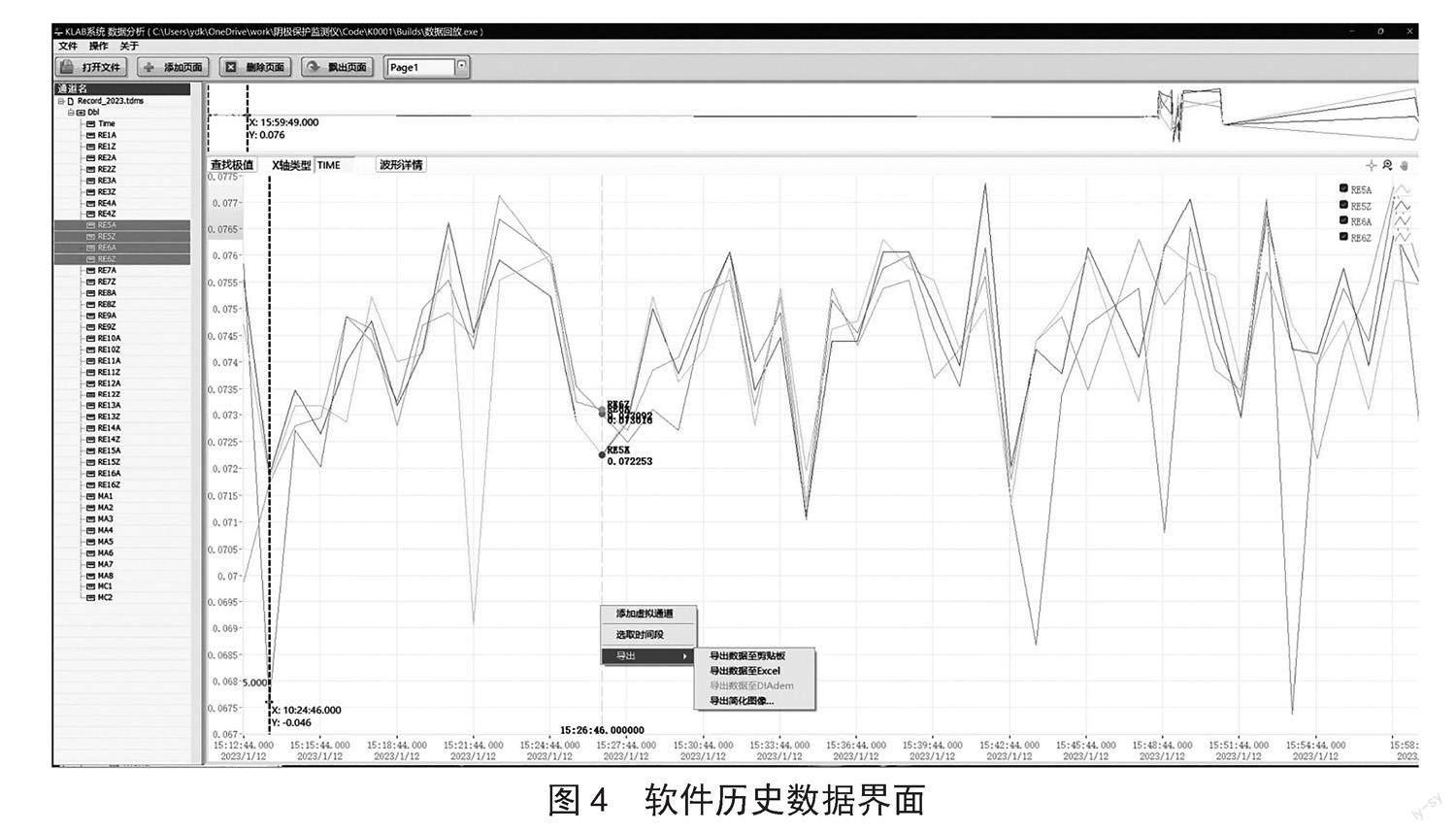
2.3.2 历史数据查看界面
历史数据查看界面如图4所示,上方是控制按钮,左侧是文件中保存的通道。可以通过将文件拖拽到中间区域,查看各个通道的历史数据。也可以通过创建一个虚拟通道,计算两个或多个通道的平均值。在公式中填写avg1 = (RE1A + RE2A) / 2,点击“确定”后将会显示“avg1”这条平均值曲线。事实上,所开发的软件中支持公式计算的有很多,具体可以查看软件内的帮助,可以选中任意时间段任意通道的数值进行计算。
2.3.3 其他界面
其他界面包括报警信息界面、报警信息记录界面、积分运算界面。其中积分运算界面可进入计算页面,其中K和m0是默认的计算参数,如果需要修改直接填写对应值,然后点击下方的计算,此时会在表格中显示计算结果——根据截止到当前已接收的数据计算出来的损耗率和寿命;当数据超出閾值或下位机报告模块出现故障时,软件会把错误通道和错误模块显示在软件界面上,同时也保存到文件里面(即记录报警信息);报警记录反映了实时的报警信息和报警历史记录,方便用户查看所有的报警历史。用户也可以将任何一段时期感兴趣的数据同时选中,进行比较,可以打印出来以供分析之用。我们的历史数据都会被打包按时间保存,随时可以调用出来进行数据分析,同时可以按照时间段选择性删除不需要的数据,以便后续进行更为深入的分析。
3 结 论
本文给出了海洋平台阴极保护智能监检测系统的总体设计方案,基于对各组成电路模块的详细设计,编写了相应的上位软件,用于对系统运行进行实时监控,随时获取外加电流的阴极保护电流及电压、牺牲阳极的阴极保护电流及电压,如果发生报警可以第一时间获取信息(比如上位机下位机连接失败,电流电压的数值超过报警值等)。完成集中监测和控制系统的硬件设计和相应上位软件的开发,同时结合工业现场的环境以及市场需求,进行环境适应性和可靠性设计,达到了预期的性能指标。这套基于工业现场环境以及市场需求完成的阴极保护检测装置,可以为保护阴极提供有效的腐蚀防护,具有广阔的应用和拓展前景。
参考文献:
[1] 华成英,童诗白.模拟电子技术基础 [M].北京:高等教育出版社,2006.
[2] 李静,陈广超.数据采集模块防雷击措施的改进 [J].中氮肥,2000(3):51-51.
[3] 陈锡辉,张银鸿.LabVIEW8.20程序设计从入门到精通 [M].北京:清华大学出版社,2007.
[4] 童长飞.C8051系列单片机开发与C语言编程 [M].北京:电子工业出版社,2005.
[5] 史荣燕,许晖,康健,等.C8051F040单片机的数据采集与控制系统设计 [J].机械与电子,2013(8):63-65.
[6] 邵静,刘福国,王秀通,等.海洋平台阴极保护与监测技术的应用 [J].装备环境工程,2018,15(3):24-28.
[7] 李永平,薛凯.基于Portal V13和S7-200 PLC的组合式双螺杆挤出机控制系统设计 [J].橡塑技术与装备,2017,43(22):56-60.
[8] 樊华,边大勇,李月海,等.阴极保护监测系统在海洋石油平台上的应用 [J].中国造船,2012,53(S2):489-493.
[9] 熊信勇,严涛,许川壁,等.海洋平台阴极保护监测系统的研制及应用 [J].热带海洋学报,2003(1):70-75.
[10] 周梁.基于实海测量参数的张力腿平台阴极保护设计 [D].大连:大连理工大学,2020.
作者简介:周伟(1993—),女,汉族,山东青岛人,中级工程师,硕士研究生,研究方向:电气自动化控制。
猜你喜欢
全面腐蚀控制(2022年4期)2022-06-17
煤气与热力(2021年12期)2022-01-19
化工管理(2021年7期)2021-05-13
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年12期)2018-08-01
电子制作(2017年19期)2017-02-02
现代工业经济和信息化(2016年3期)2016-05-17
船海工程(2015年4期)2016-01-05
