基于PLC 的果蔬采摘机械手系统控制设计
2024-04-12 06:29蒲维杰
南方农机 2024年7期
蒲维杰
(临夏现代职业学院,甘肃 临夏 731100)
0 引言
临夏县位于甘肃省东南部,是一个水果资源丰富的地区。其地理位置和气候条件为多种水果的生长提供了理想的环境,使得临夏的水果以品质优良和品种丰富而闻名。随着近年来生活水平的提高和绿色健康食品需求的增加,临夏县大力发展果业生产,特别是在苹果和梨的种植上已形成较大的生产规模。其产品不仅销往国内市场,也出口到海外,赢得了良好的市场声誉。然而,果业的快速发展也带来了新的挑战:传统的人工采摘方式已经无法满足日益增长的市场需求,同时也面临着劳动力成本上升和劳动力老龄化的问题。
为了应对这些挑战,临夏县正逐步引入果蔬采摘的机械化和自动化技术。采用先进的PLC 技术[1-5]的果蔬采摘机械手不仅可以有效提高采摘效率,降低劳动强度,还能保证水果的采摘质量。这种技术的应用不仅提高了水果产量和质量,还大大降低了生产成本,加速了临夏县农业现代化的步伐。总体而言,临夏县的水果产业正处于一个不断发展和升级的阶段。通过引入自动化和智能化技术,不仅提升了产业的竞争力,也为当地农民带来了更多的经济效益,从而有助于推动临夏县乃至整个甘肃省的农业和经济发展。
1 总体方案设计
1.1 执行系统设计
1.1.1采摘方案对比
在果蔬采摘机械手的应用中,主要有三种采摘方式:旋转式、拉拽式和刀具剪切式。旋转式采摘虽简单,但易损伤成熟果实;拉拽式虽快速,但操作粗暴,可能损害果实。相比之下,刀具剪切式采摘法虽然复杂,需要额外的刀具,但它在保持果实完整性方面表现更佳。考虑到果实完整性对运输和储存的重要性,刀具剪切式成为更优选择,尽管操作上较为复杂,但能有效避免果实损伤,保证其经济价值。因此,综合各方面因素,刀具剪切式是最合适的采摘方法。
1.1.2机械手的组成
果蔬采摘机械手执行系统的组成如下。
1)手部:机械手夹持果蔬的部位。
2)刀具:用于剪断果蔬和枝干的连接。
3)臂部:支持夹手运动的部位。
4)机座:机械手用于支撑机械臂的部位。
5)驱动系统:用于提供机械手臂部、机械手夹手和刀具运动动力。
由上述执行系统和其他设备组成果蔬采摘机械手,如图1所示。

图1 机械手结构组成
1.2 控制方案设计
1.2.1自动采摘控制设计
果蔬采摘机械手的核心技术之一是视觉系统,基于数字图像处理技术,精准识别和定位目标果蔬。这一系统通过CMOS 传感器将光信号转换为电信号,随后工业摄像机捕捉的模拟信号被转换为数字信号,以便于工控计算机进行处理。在这个过程中,每个像素点的灰度值代表光强,这些值被存储在CMOS芯片的矩阵数据结构中。工控计算机处理这些信号,并指导机械手的运动。在采摘过程中,机械手利用CDC 摄像机作为视觉控制系统的感应器,识别果蔬的具体位置[6-10]。视觉系统分析后,控制小车移动至采摘点。机械手到位并复位后,通过伸缩气缸伸出夹手,夹紧果蔬。一旦确认果蔬被稳固夹住,夹手通过气缸回缩,同时刀具剪断果蔬与枝干的连接。剪断操作完成后,夹手携带果蔬通过机械臂的摆动气缸移至储存点,将果蔬放入储存仓。随后,机械臂复位至初始位置,视觉系统检测储存仓重量,确认无超重情况后,控制小车移动至下一个采摘点。通过上述流程,机械手实现了果蔬采摘的自动化。
1.2.2手动采摘控制设计
果蔬采摘机械手同时具备手动控制,可以实现夹手伸出、回缩、果蔬摘取和储存等功能。
PLC 机械手复位到采摘点:摆动气缸右旋机械手到达采摘点。
夹手前伸:伸缩气缸前伸到达抓取果蔬位置。
夹手回缩:伸缩气缸回缩到原位。
夹手夹紧/松开:实现对果蔬的抓取和储存。
2 PLC程序设计和仿真
2.1 启停程序设计
本文使用三菱GX Works2 软件进行PLC 程序的编写,该编程软件是FX 系列PLC 的中文编程软件。启动、暂停程序:按下启动按钮,自动、手动程序才能运行,按下暂停按钮X015(上升沿触发)启动辅助继电器M0 断电,自动程序跳转到最后一段(即P0处),自动、手动程序暂停。再按一次,自动程序继续运行。启动程序如图2所示。
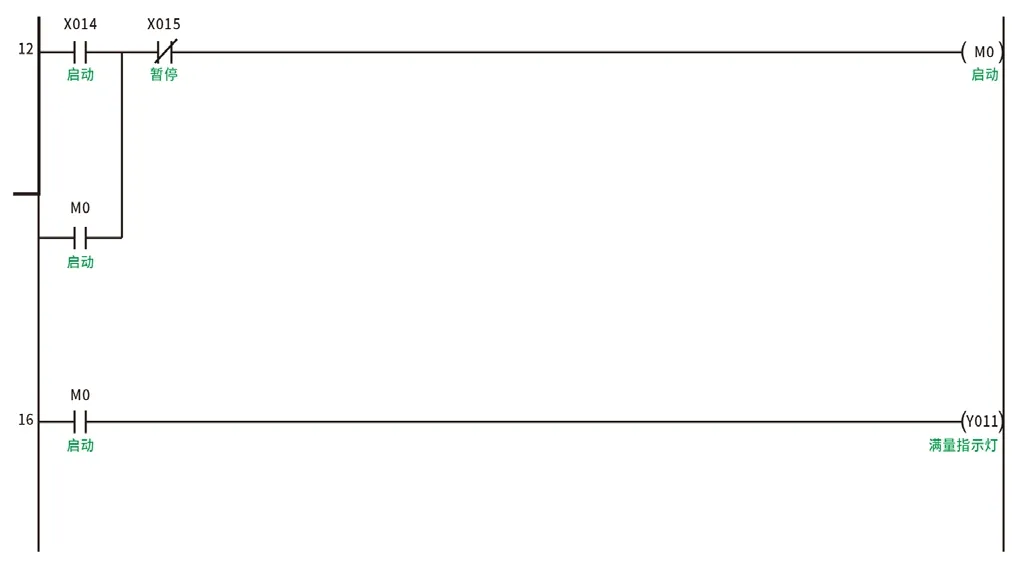
图2 启动程序
自动、手动程序转换:按下自动按钮X020,M88辅助继电器得电,自动指示灯亮起,手动程序不能运行。同理,按下手动按钮X021,M99 辅助继电器得电,手动指示灯亮起,自动程序不能运行。自动、手动程序转换程序如图3所示。
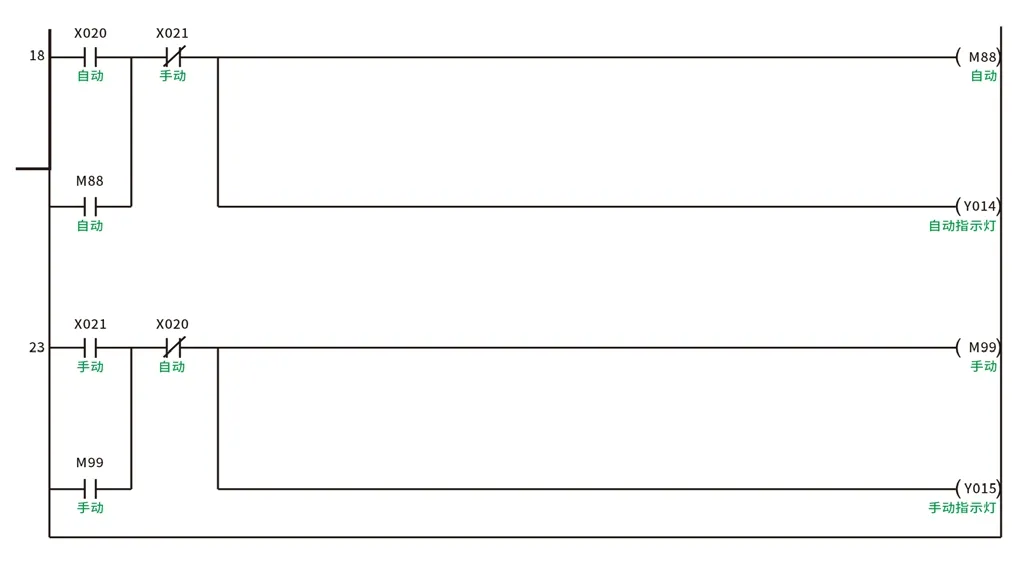
图3 自动、手动程序转换程序
2.2 自动程序设计
自动程序要具备采摘点识别到位X0、启动辅助继电器M0 得电等条件才能自动运行启动,条件得到满足后M18 辅助继电器得电夹手前伸,前伸触发限位开关后M18 断电,M10 得电夹手夹紧。夹手夹持自动程序如图4所示。

图4 夹手夹持自动程序
夹手夹紧时若夹不到果蔬,则夹紧限位得电,M19、M11得电夹手回缩松开,然后重复上述程序,夹手重新伸出夹紧果蔬。夹手复位自动程序如图5所示。
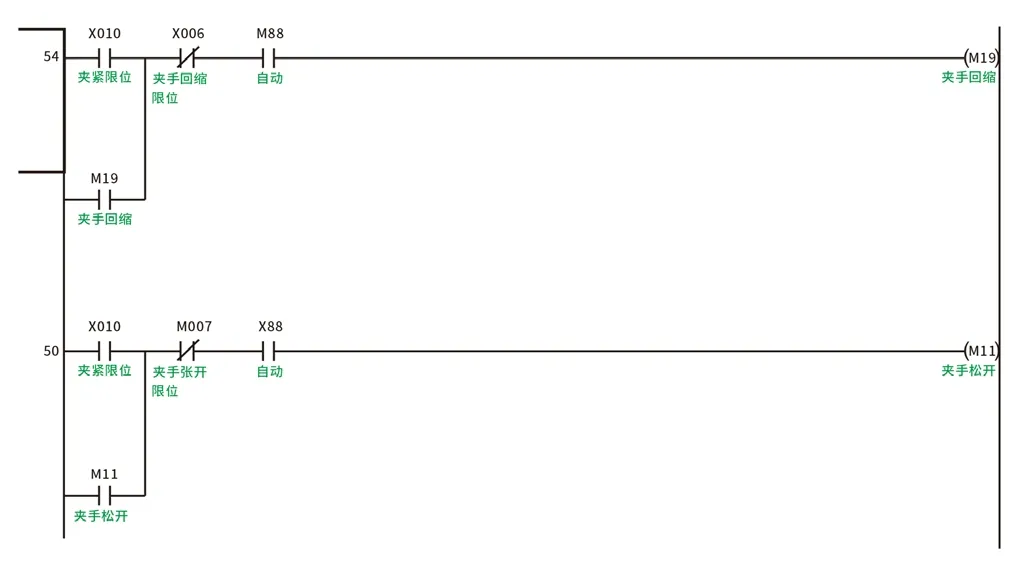
图5 夹手复位自动程序
夹手夹住果蔬,压力传感器得电,M20 得电夹手回缩,回缩至限位开关X006 得电,M20 断电回缩停止。M13得电,刀具对果蔬进行切割。切割果蔬自动程序如图6所示。
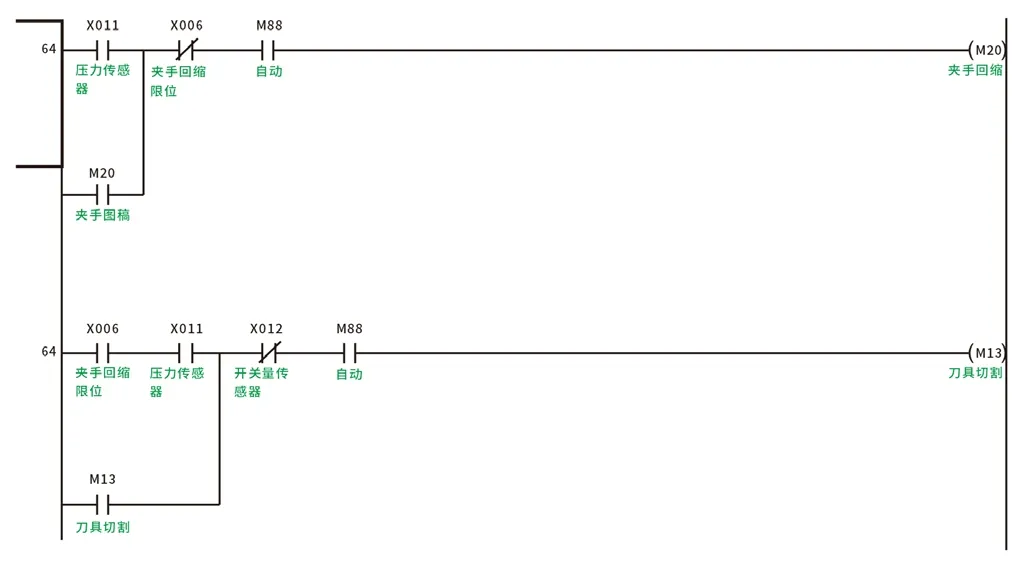
图6 切割果蔬自动程序
刀具切割后X012 开关量传感器检测到果蔬与枝干断开后得电,机械手运动到储存点。左旋自动程序如图7所示。
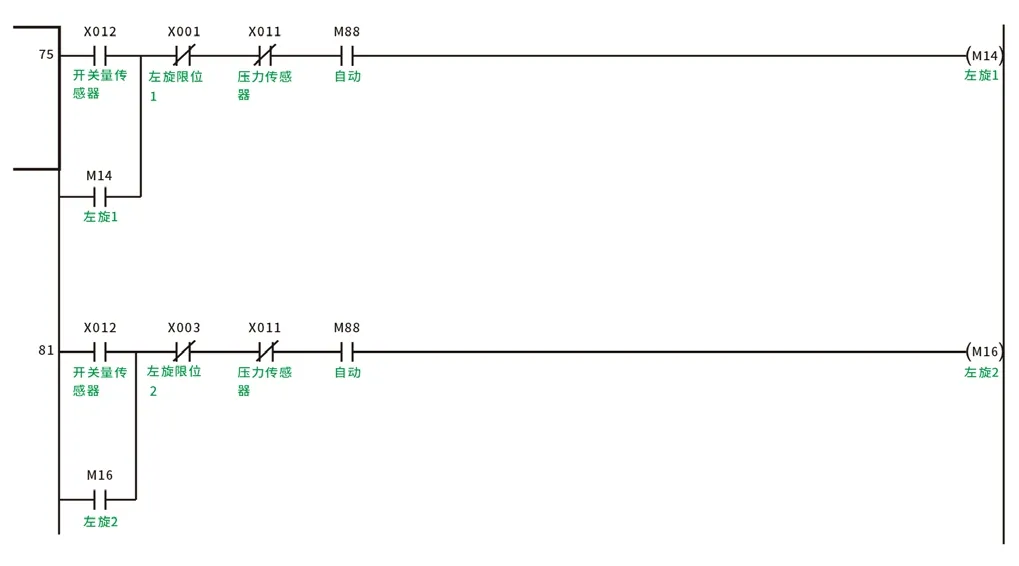
图7 左旋自动程序
机械手到达储存点后,夹手松开。夹手松开自动程序如图8所示。

图8 夹手松开自动程序
夹手松开到达限位开关X007 得电,经计时器计时2 s 后,机械手运动复位到原位。复位后,若储存点载重达标,自动程序停止;若未达载重上限,识别系统控制小车到达下一个果蔬采摘点继续采摘。右旋1、右旋2 自动程序如图9、图10所示。
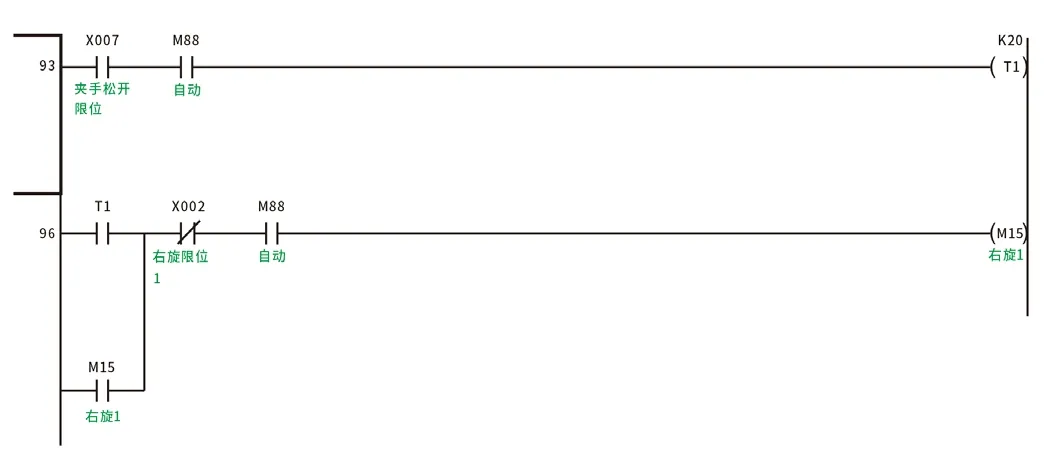
图9 右旋1 自动程序
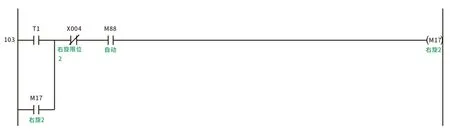
图10 右旋2自动程序
3 结论和展望
笔者经过前期对果蔬采摘机械手的了解研究后开始设计相应的控制方案,控制方案现已达到预期效果。果蔬采摘机械手能够通过PLC 控制器和其他传感器的配合,进行果蔬的自动采摘和储存。在果蔬采摘过程中,既能手动控制也能自动控制,同时,在发生故障时能够按下停止或急停按钮并发出报警信号。在本次设计过程中笔者能十分清晰地认识到实践在机械自动化领域中非常重要,并且在自动化设计中要具备充足的理论知识。
猜你喜欢
橡塑技术与装备(2023年2期)2023-02-10
中国特种设备安全(2022年6期)2022-09-20
哈尔滨轴承(2020年4期)2020-03-17
民生周刊(2018年11期)2018-07-30
猪业科学(2018年4期)2018-05-19
新农村(2017年20期)2017-09-28
农民致富之友(2017年10期)2017-06-15
小学生导刊(2017年17期)2017-05-17
甘肃林业(2016年3期)2016-11-07
世界汽车(2016年8期)2016-09-28