
基于高分遥感图像处理技术的公路勘查方法研究
2024-04-07 01:36:08陈锦文
自动化仪表 2024年3期
魏 清,陈锦文
(陕西省交通规划设计研究院有限公司,陕西 西安 710000)
0 引言
随着国家经济实力、科学技术的发展,我国公路建设的规模与日俱增。公路不仅与人们的日常出行息息相关,还对我国各地区的经济、文化、交流等起到重要的推进作用。但是目前的公路勘查技术还存在各种问题,如对公路信息获取不准确、无法有效排除环境对勘查设备的影响、勘查设备采集到的信息无法及时传输到用户手中造成信息滞后等。因此,对公路状态的实时勘查极其重要。
为了解决公路信息勘测的问题,国内外的相关技术文献提供了多种方案。文献[1]通过常规形式的无人机摄影进行公路勘查。这种方案在正常情况下能够准确地对公路进行勘查,但是无法排除强光、云雾等因素的干扰,难以有效应对恶劣天气下的公路勘查。文献[2]着重设计高速数据传输通道。虽然这种方案采用无线数据传输技术实现了信息远程传递,使系统工作效率大幅提高,但是在出现传输通道不兼容的问题时难以保证数据信息传输的及时性。文献[3]设计了公路勘查数据的分析系统,应用了深度神经网络实现了公路勘查影像数据的分类与计算,并通过全卷积网络(fully convolutional network,FCN)对影像像素进行分类,在图像语义分割中实现了先进的性能。但是这种方案无法实现多种数据信息的同步采集,在处理信息时易受到外界因素的影响。
针对上述方案的不足,本文研究了一种基于高分遥感图像处理技术的公路勘查方法。该方法的创新点如下。首先,该方法采用基于微波的遥感勘查技术,融合了数据图像处理技术、数据传输技术等,能够实现公路勘查的智能化、数字化,提高了公路勘查信息的采集与处理能力。其次,该方法设计了一套双行采样的图像采集电路,在采集公路信息的过程中能够有效地抵抗外界数据信息的干扰,从而提高公路勘查信息获取的纯洁度。最后,该方法采用了暗通道先验模型去云雾技术,在恶劣天气下对公路信息进行勘查时能够有效排除云雾等不利因素的影响,提高了公路遥感勘查过程中抗天气影响的能力。
1 基于高分遥感技术的公路信息勘查系统
基于上述设计思路,本文的基于高分遥感图像处理技术的公路勘查方法能够实现公路勘查技术的远程无线数据通信,有效保证了勘查数据信息获取的及时性[4]。
基于高分遥感技术的公路信息勘查系统结构如图1所示。
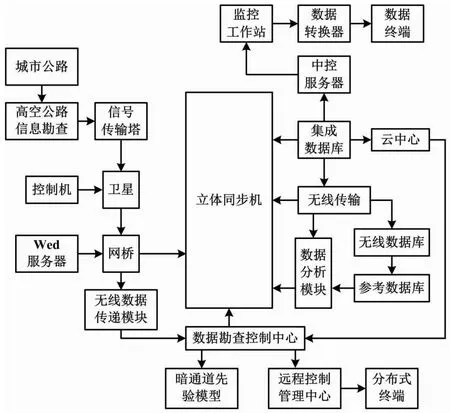
图1 基于高分遥感技术的公路信息勘查系统结构
由图1可知,基于高分遥感技术的公路勘查系统在硬件结构上包括数据勘查控制中心、无线数据传递模块、数据分析模块等。该系统的整体工作流程如下。首先,由高空设备(无人机、雷达等)通过微波勘查的方式采集公路状态信息。然后,这些信息会通过基于双行采样的信息传输设备,在保真的前提下传输至太空卫星。卫星内置图像处理核心,将接收到的公路图片通过暗通道先验模型进行去云雾、降噪等处理。接着,处理过的图片经信号转接装置传输到控制中心。控制中心会根据Storm系统(一种分布式实时大数据处理系统)集群的大数据库及数据解析单元对图片进行分析,由此判断公路状态。最后,控制中心将分析后的数据上传至通信服务器中供用户调用,并保存这些新的数据以更新数据库,从而便于后续调用[5]。
2 基于双行采样的图像信息采集技术
在无人机群组进行公路信息采集的过程中,为了保证高分遥感装置采集到的图像不受自身电源频率、外部磁场等因素的干扰而产生图像噪点,并提高图像数据信息的采集能力,双行采样电路设置了双行采样模块。
双行采样电路如图2所示。
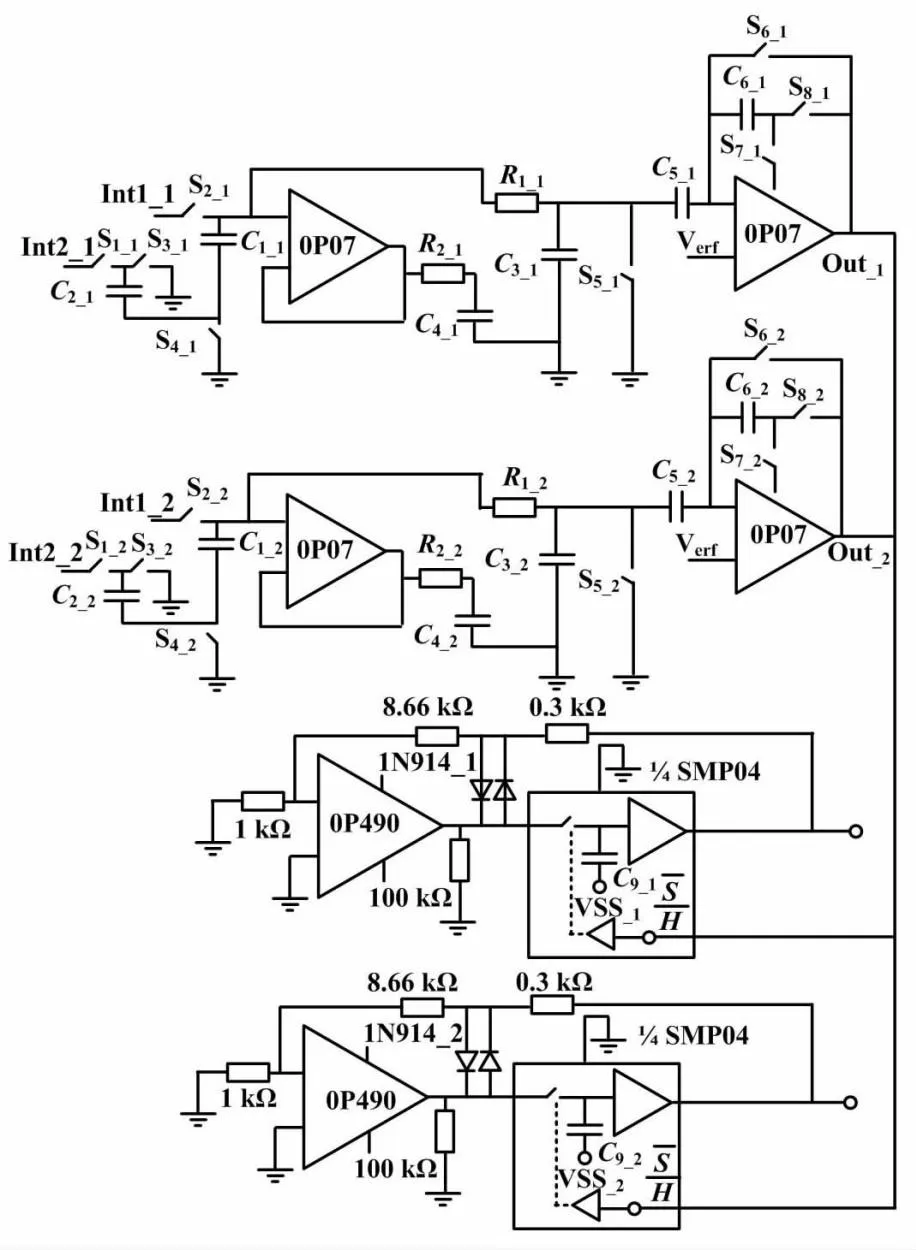
图2 双行采样电路图
由图2可知,双行采样电路由两个OP07运算放大器通过电阻、电容连接组成。OP07是一种低噪声、非斩波稳零的双极性运算放大集成电路,具有输入偏置电流信号低、开环增益高的特点。双行采样模块的工作通过开关进行控制。S1~S8是开关。双行采样电路的采样过程为:首先将S4闭合,以使信号输入端接地;然后将2号输入端口的S1闭合,以实现复位信号的采样;最后将1号输入端口的S2闭合,以实现对积分后信息的采样。在工作过程中:首先,将右侧失调储存电路中的S6闭合,以实行复位工作;然后,将双行采样电路连接运放输入端口以及输出端口,以形成单位负反馈电路。在完成采样任务以后,系统需试验光信号减去复位信号的任务。这时,需要将S3闭合以使2号输入端接地[6],并将完成采样任务后的输入信号以及复位信号之间的差值输送到输出端。在这个差值进行输送的过程中,闭合S5进行接地、闭合S8使电容接入,并断开复位S6。由根电荷守恒定律可知,上述差值会被输送到运放的输出端。两个放大器中间通过R1、R2、C3、C4的配合作用对电压、电流进行处理,以保证信号不会产生失真[7]。
双行采样电路实现数据信息采集后,提高了图像信息的采样能力,避免了图像数据信息在传输过程中产生的数据丢失问题。这可以有效避免因采样误差带来的损失,从而保证公路勘查工作的正常、稳定进行[9]。
3 去云雾技术及大数据分析方案
3.1 暗通道先验模型去云雾技术
在进行公路遥感勘测的过程中有时会遇到云雾天气,但是云雾不会完全阻碍勘测内容的信息传输。因此,可以通过云雾图像处理实现信息恢复。本文设计了暗通道先验模型去云雾技术。暗通道是大部分无云雾图像的天空区域,图像像素至少含有一个亮度值特别低的颜色通道。这个亮度值几乎为0。暗通道先验模型去云雾技术不仅能够提高云雾去除能力,还能够提高外界数据影响因素分析的能力。
暗通道先验模型的构建方法如下。
首先,设置雾霭形成模型:
I(x)=J(x)t(x)+A[(1-t(x)]
(1)
式中:I(x)为实际的有雾图像帧;J(x)为去雾后的原视频帧;A为全球大气光成分;t(x)为太阳光通过媒介被无人机采集到的无散射部分(介质传输率),0≤t(x)≤1。
其次,对于任意自然场景的无雾图像的J(x),其暗通道满足:
(2)
式中:Jdark(x)为无雾图像在红绿蓝(red green blue,RGB)三个颜色通道的暗原色。
在以I(x)为中心的局部邻域内,将式(2)代入式(1),可得:
(3)
式中:ω为调整因子,满足0<ω<1。
ω越小,则去雾效果越不明显。
最后,将式(3)代入式(1),可得:
(4)
式中:J′(x)为最后求得的去云雾图像。
多尺度修正暗通道算法流程如图3所示。
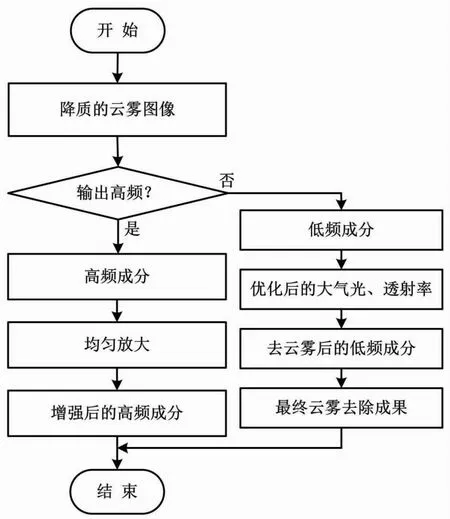
图3 多尺度修正暗通道算法流程图
由无人机群组勘查到的公路图像信息中的高频成分主要包含图像的轮廓细节。本文通过均匀放大的形式来增减图像被云雾遮掩的轮廓信息。对图像信息处理后的高频部分可以表示为:
Hf=aHi
(5)
式中:Hi为图像信息中的高频部分;Hf为对图像信息处理后的高频部分;a为一个大于1的自然数。
当Hf的取值为0时,被云雾遮掩的轮廓信息被去除;当Hf的取值介于0和1之间时,数据信息仍旧存在,但是不会影响整个图像数据处理过程;当Hf的取值大于1时,该值应该进一步去除。去除时要对高频信息部分进行均匀放大,从而提高图像信息纯洁度。
低频部分的处理为:通过遥感技术采集到含有云雾的图像部分主要分布在图像的低频部分,因此需要对低频部分进行暗通道先验处理。暗通道先验处理中可能会受A选取的方式不同而造成误差。下面将对A的取值进行修正[10]。
A的计算方法如下。
①设置边缘扩展长度k,将采集到的云雾图像J以及暗通道Jdark顺着边缘进行对称的向外延伸。如果图像的所有通道的原始尺寸都为m×n,那么进行边缘扩展后的图像尺寸就变成了(m+2k)×(n+2k)。
②将尺寸为(2k+1)×(2k+1)的窗口滑块在扩展后的图像上从左上角滑动到右下角。这样,J以及Jdark就会被分成许多的补丁块对。
③将暗通道先验算法中计算A的方法应用在对应的补丁块对中。这样就可以得到相关区域最精确的大气光的成分值。
④通过平滑滤波算法对A的值进行平滑运算。这有利于目视解译。平滑滤波是低频增强的空间域滤波技术,可以消除图像的噪点,使输出的图像变得清晰[11-12]。
通过以上步骤就可以得到最终消去云雾的勘查图像,大幅提升图像处理能力。
3.2 基于Storm系统的高分遥感图像分析算法
为了提高Storm系统高分遥感图像准确度分析和处理能力、公路勘查信息的计算和分析能力,本文设计了基于Storm的实时数据分析技术。Storm有容错高、低延时、易扩展、不易丢失信息等特点,广泛应用在数据分析、计算等方面。
为了加快公路勘探数据的处理速度、提高准确率,本文设计了数据处理规划 (data processing planning,DPP)和单工作节点调度(single node schedule,SNS)的任务调度算法。DPP算法可以使用户以更大的自由度进行数据调度,并且准确分析所有工作节点的使用状况。而SNS算法可以优化工作节点的工作进程。
基于Storm系统的数据分析流程如图4所示。
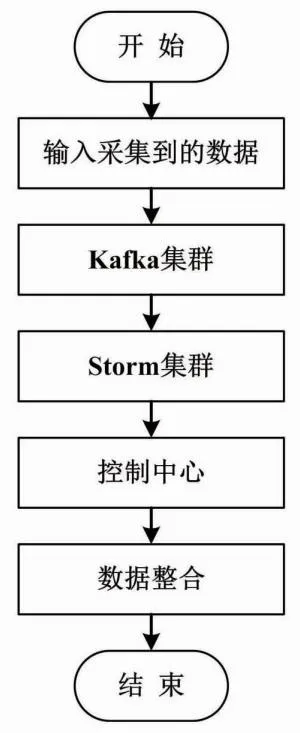
图4 基于Storm系统的数据分析流程图
3.2.1 DPP算法设计
①计算不同拓扑信息Ti(i=1,2,…,t)的所有组件(内存、磁盘、网络、中央处理器等)Cij(i=1,2,…,t;j=1,2,…,c)。其并发程度之和为Sumexec。
(6)
②按照需求分别计算每种类型的组件的权重:
Weight(Rtype)=
(7)
式中:Rtype为某类型的数据资源。
③根据Ti所需要的工作进程数,处理其余的不同工作进程数量。计算结果需要向下取整。
Numworker(Rtype)=[Weight(Rtype)×w]
(8)
取整之后,SlotSxy(x=1,2,…,n;y=1,2,…,s)按由高到低的顺序进行排序。
④将需要的资源为Rtype的任务程序中的执行器Eijk(i=1,2,…,t;j=1,2,…,c;k=1,2,…,e)按照轮流查询的方法,对其严格平均并将相应资源分配到资源为Rtype的SlotSxy(x=1,2,…,n;y=1,2,…,s)上。
通过以上步骤就可以实现对数据分析处理进程的优化。
3.2.2 SNS算法设计
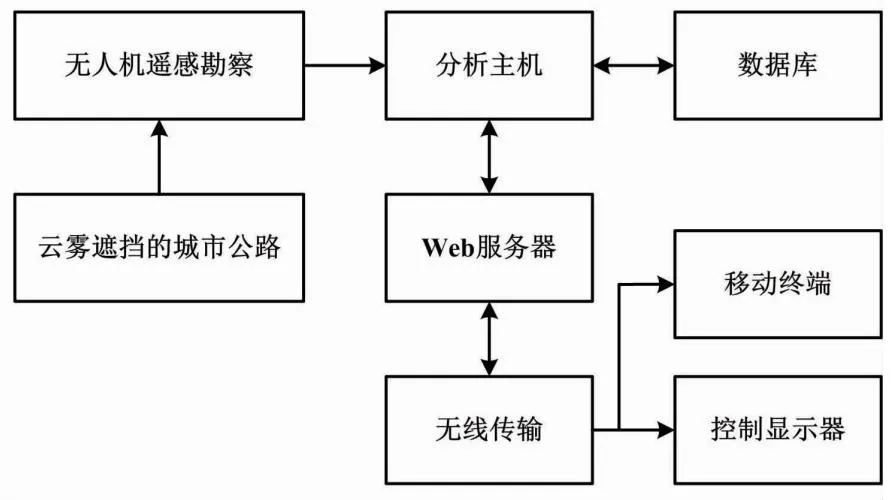
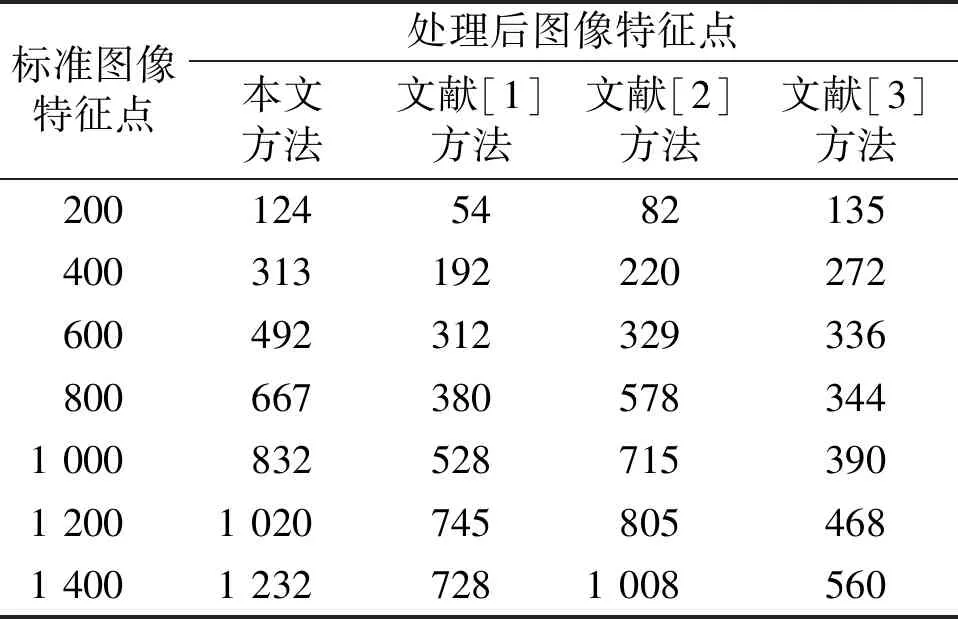
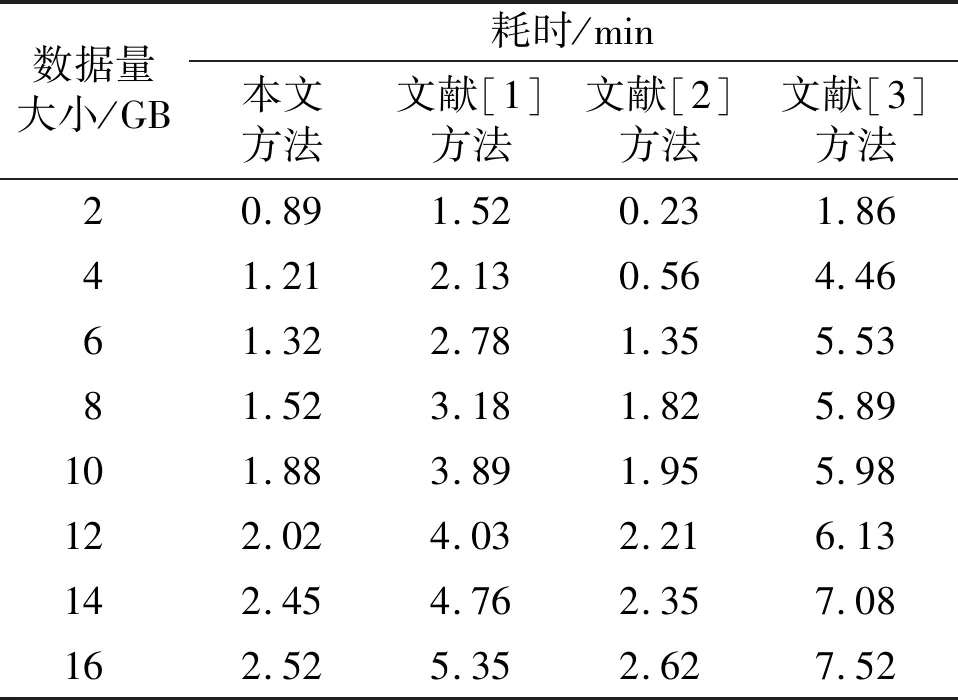
①将所有的工作节点Nx(x=1,2,…,n)分别按照自身可用工作节点接口的数量以降序的形式排列,从而形成一个长度为n的工作节点序列。如果i fslots(Ni)≥fslots(Nj) (9) ②分别对Ti(i=1,2,…,t)自身所需要的进程数量按照依次减少的方式排列,就可以形成一个长度为t的拓扑序列。如果i fworkers(Ti)≥fworkers(Tj) (10) ③从第一个拓扑序列的第一个工作项目开始,将第一个项目配发给工作节点序列中的第一个。这时可能会产生以下两种不同的情况。 第一种情况:如果fworkers(Ti)≤Tslots(Nx),代表配发成功,就可以将fslots(Nx)的值更新为fslots(Nx)-fslots(Ni),并将所得结果重新添加到工作节点序列中进行排列。 第二种情况:如果fworkers(Ti)>fslots(Nx),则需要将其配发给较少的工作节点,将fworkkers(Ti)的值更新为fworkkers(Ti)-fslots(Mx),再重复对第一个项目进行配发,并将其配发给工作节点序列中接下来的一个节点。 通过这种数据调度方法,能够有效地提升本文方法对公路高分遥感勘查图像的数据分析能力,从而针对勘查内容完成实时大数据分析的任务。 为了验证本文方法在云雾去除以及数据分析方面的性能,本文进行了相关试验。试验选用Matlab 2019软件进行数据信息仿真。分析系统主机处理器为E5700@3.00 GHz。安装内存为8.00 GB。操作系统为Windows10。驱动器为ST3320410SV ATA Device。显示适配器为Intel(R) G33/G31 Express。 试验系统框架结构如图5所示。 图5 试验系统框架结构 试验在云雾天气下分别采用文献[1]~文献[3]方法与本文方法进行对比,通过分析主机来模拟卫星的图像处理能力。处理后的图像数据经网络服务器传输后,以数据信息的形式呈现在数据终端,供用户查看公路勘查结果。为了微观化分析本文方法的技术效果,本文通过图像特征点对比来判断处理后图像的标准率。 (11) 式中:P为标准率;Np为优化后的云雾图像特征点数;No为晴天图像标准特征点数。 在试验过程中,本文将多种方法处理后图像的特征点数量进行对比,以直观表示出云雾图像特征点个数与标准图像的特征点个数。几种方法处理后图像的特征点数量对比如表1所示。 表1 几种方法处理后图像的特征点数量对比 由表1可知:文献[1]方法处理后的图像标准率波动过大,表示该方法无法有效地对云雾图像进行优化;文献[2]方法处理后的图像标准率最终稳定在70%左右;随着特征点个数的增加,本文方法处理后的云雾图像标准率达到85%。该结果表明,本文方法有着良好的去云雾能力,能够很好地满足实际公路勘查的需要。 几种方法处理相同数据量耗时对比如表2所示。 表2 几种方法处理相同数据量耗时对比 由表2可知各方法处理数据能力的强弱。 ①文献[1]和文献[3]所设计的方法处理数据所花费的时间随着数据量的增长而大幅增长。 ②文献[2]花费时间要比文献[1]和文献[3]少得多。 ③本文方法在处理相同大小的数据量所花费的时间最少。 针对公路勘查过程中的高分遥感技术的图像获取、分析以及传输三个过程中存在的问题,本文不仅设计了双行信息采样电路以及信息保真电路来保证公路勘查图像数据信息的准确性,还设计了基于暗通道先验模型的去云雾技术以获得更加准确的图像信息。 此外,本文在图像信息处理技术的基础上研究了基于Storm系统的数据传输算法,实现了数据的高效传输以及数据分析。实际试验对比表明,本文方法在优化图像和去除图像云雾干扰的能力上优于其余几种方法,并且在处理数据的速度上也有很大的优势。本文方法具有较高的应用价值。4 试验与分析
5 结论
猜你喜欢
山东农业科学(2023年1期)2023-03-06 07:09:36音乐天地(音乐创作版)(2022年6期)2022-10-14 11:26:52中学生数理化·八年级物理人教版(2022年4期)2022-04-26 14:11:08作文小学中年级(2021年2期)2021-03-15 07:30:58成都信息工程大学学报(2019年3期)2019-09-25 08:31:14心声歌刊(2019年1期)2019-05-09 03:21:28国画家(2017年6期)2017-12-07 02:01:24自动化学报(2017年5期)2017-05-14 06:20:44农家科技中旬版(2016年8期)2016-11-02 00:17:28现代农业(2016年6期)2016-02-28 18:42:54
