基于特色村镇的多源影像最优融合分类方法探讨
2024-03-31 05:38于丽君朱建峰
地理空间信息 2024年3期
徐 聪,于丽君,柳 泽,朱建峰,李 力,俞 燕
(1. 西安科技大学测绘科学与技术学院,陕西 西安 710000;2. 中国科学院空天信息创新研究院,北京 100101;3. 自然资源部国土空间规划研究中心,北京 100034;4. 中国国土勘测规划院,北京 100035;5. 中国人民大学,北京 100872)
2013 年国家发布中央一号文件[1],首次提出建设“美丽乡村”的发展目标;2017年中央一号文件[2]明确提出建立宜居、宜业的特色村镇;随后习近平总书记在“十九大”报告中[3]提出了“乡村振兴”的发展口号,自此特色村镇建设全面升级[4-6]。优化村镇用地布局、合理安排农村各业用地是特色村镇建设的一个关键任务[2-3]。我国地大物博,特色村镇种类繁多,传统的多依靠人力的村镇地物提取方式已无法满足日益快速的国家发展规划需求,为了更好、更及时地监测、保护和发展村镇用地,时效性好、数据来源多样、处理速度快的遥感技术手段正逐渐取代传统手段。运用遥感技术进行特色村镇地物分类的关键点包括数据来源和分类算法。遥感技术日新月异的发展产生了大批高质量的多源遥感数据,多源数据的空间、光谱和时间差异性,使得相互之间具有很好的互补性,可以产生更多的融合特征信息,在实践中得到了很好的应用[7-10]。此外,丰富的实验数据源也孕育出了一系列实时性强、速度快、精度高、鲁棒性好的遥感分类算法,面向对象的随机森林算法(OB-RF)是其中的佼佼者[11-22]。虽然多源数据在地物分类上已得到了广泛应用,但已有研究多着眼于多源数据单一融合方法的分类研究,鲜少探讨多源数据的最优融合分类方法,缺乏对多源数据的优势最大化探索。因此,本文以浙江省湖州市莫干山镇的特色村镇何村为研究对象,采用无人机和GF-1 号影像数据,设计了6 种特征组合方法来对比分析多源数据融合方式,并对融合结果进行OB-RF分类,旨在获取更有效的多源数据组合方法来提高特色村镇的地物提取精度,为后续多源数据特色村镇地物提取提供更多技术参考。
1 研究区概况与数据来源
1.1 研究区概况
何村位于浙江省湖州市德清县西部山区,紧靠国家级风景旅游名胜莫干山,总面积为6.8 km2,土地利用类型主要为耕地(以水田为主)、林地(以山林和竹林为主)、茶园(盛产莫干黄芽)等。根据东南大学段进院士团队的研究[23],何村位于江浙特色区,属于太湖亚区类特色村镇,主要特征为人口稠密、村庄面水而居、多为两层民居,按天井方式组合、具有特色鲜明的封火墙,系多民族混居,信仰丰富,村庄多信仰设施,宜生态特色旅游。
1.2 数据来源
本文采用无人机影像和GF-1 号影像,获取时间分别为2015年6月和2015年2月。无人机影像的分辨率为0.5 m,包括R、G、B 三个波段,可提供详细的纹理和几何等空间影像特征;GF-1 号数据由全色多光谱相机(P/MS)获取,包括1 个空间分辨率为2 m的全色波段和4 个空间分辨率为8 m 的多光谱波段(表1),可提供更丰富的光谱信息。本文将二者结合,期望获取更高的分类精度。

表1 GF-1 P/MS相机波段信息
1.3 数据预处理
对于GF-1号影像,研究区位于两幅GF-1号影像的结合区,需要进行一系列预处理。首先将两幅原始GF-1 号影像分别进行辐射定标,获取地物真实反射信息;然后进行正射校正,消除扫描畸变和非系统因素的几何变形;再对两幅影像的多光谱和全色波段分别进行镶嵌,并对镶嵌结果进行融合,获取高空间分辨率(2 m)和多光谱(红、绿、蓝和近红外)的融合影像;最后对融合结果进行辐射校正以消除辐射误差。预处理完成后,将无人机影像与GF-1 号融合校正结果进行空间配准,并基于何村矢量边界进行裁剪,获取研究区的两幅影像数据。
2 研究方法
本文的技术流程见图1,首先将预处理完成的影像数据导入eCognition 软件进行多尺度分割,获取同质性对象,以对象为分类目标可以很好地降低结果的破碎性[24-25];再计算每个对象的光谱、纹理、几何和指数特征;然后设计6种不同的特征组合方式对无人机影像和GF-1号影像进行融合,以探索哪种组合方式的分类精度更高;最后基于训练样本进行OB-RF 分类,选取合理的分类参数,并对分类结果进行精度评价。

图1 本文技术流程图
2.1 影像分割
eCognition 中的多尺度分割方法通过分割尺度、形状因子和紧致度因子3 个关键参数来控制分割结果。这3 个关键参数的最优解,通过控制变量法[26]和ESP辅助插件[27]来获取,首先以0.1为步长值,分别将0.1~0.9范围所有的形状因子和紧致度因子进行排列组合,得到耕地分割效果最优的形状因子和紧致度因子分别为0.3 和0.8;然后通过ESP 插件来辅助寻找最优分割尺度,ESP 插件采用自下而上的迭代分割方法,每次迭代会计算对象局部方差和局部方差变化率,一般认为[15,18-19,26]当局部方差变化率取值为局部最大值时,即为局部最优分割尺度。由图2a 可知,局部最优分割尺度存在多个,由于尺度越大局部方差越大、尺度越小时间成本越高,结合具体分割效果,本文分割尺度选取为67。采用最优分割尺度的影像局部分割效果见图2b。

图2 ESP估算最佳分割尺度和影像局部分割效果
2.2 对象特征获取
影像的对象特征参数是后续随机森林分类方法的重要依据。通过查阅相关文献[15,18-19,28-31]可知,目前常用的对象特征描述参数包括光谱特征、纹理特征、几何特征和指数特征。结合本文研究实际,共获取19类对象特征,各特征变量名称描述和公式见表2,由于指数特征计算需要近红外波段,而无人机影像缺乏近红外波段,因此只能获取14 类对象特征;GF-1 号影像可获取全部对象特征。

表2 对象特征与公式
2.3 6种特征组合方式设计
高分数据的空间分辨率高,对地物空间特征细节的体现较突出,多光谱数据丰富的波谱特征可放大不同地物的空间差异,二者结合可获取更精确的分类特征信息。不过已有研究鲜少探讨二者合理的组合方式,因此本文重点探讨如何利用更合理的组合方式来获取更精确的分类结果。本文设计了6 种特征组合方式来对比分析高分数据与多光谱数据的合理融合方式,其中组合1~4 为多源数据特征组合,组合5~6 为对照实验组,为单一数据源特征组合。
组合1:无人机+GF-1号(全部特征),即简单做加法,将无人机的全部14 类对象特征与GF-1 号影像的全部19类特征叠加在一起,形成一幅待分类的特征影像。组合2:无人机GF-1 号融合影像(全部特征),首先将两幅影像进行传统的GS算法融合,获取一幅融合后影像,再将融合影像的全部19类对象特征组合成一幅待分类的特征影像。组合3:无人机+指数合成影像(全部特征),首先将5 幅GF-1 号指数影像(基于5个指数特征获取)组合为一幅5波段的指数合成影像,再计算该影像的14类对象特征,并与无人机的全部14类对象特征进行叠加,形成一幅待分类的特征影像。组合4:无人机+GF-1号指数特征,将GF-1号的5个指数特征与无人机的全部14类对象特征进行结合,形成一幅待分类的特征影像。为了更好地分析多源数据特征融合分类方法的优劣,另外设计了两组对比实验。组合5为无人机(全部特征),即获取无人机全部14类对象特征作为后续的分类特征;组合6为GF-1 号(全部特征),即获取GF-1 号全部19 类对象特征作为后续的分类特征。
2.4 样本数据
根据土地利用现状分类2020版文件和何村用地实际情况,将研究区用地分为道路、水体、林地、园地、建筑物和耕地6 类一级用地。6 类用地需要制作训练样本和验证样本数据,训练样本用于训练随机分类算法,建立随机分类模型;验证样本用于验证分类结果精度。根据样本选取的均衡性和代表性[32-33],两类样本的选取个数见表3。
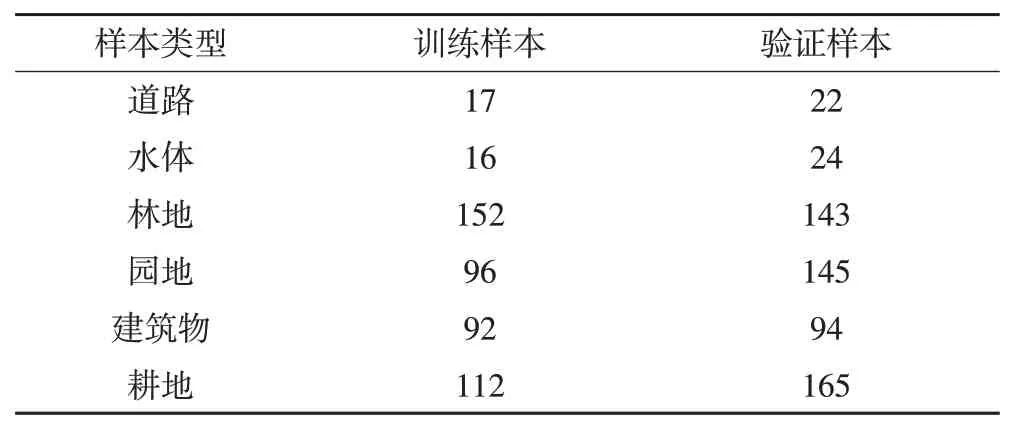
表3 6类用地样本选取结果/个
2.5 基于OB-RF的分类算法
已有研究在进行多源数据面向对象分类时,不同影像会采用不同的最优分割尺度[18],本文通过相关实验发现,多种分割尺度会降低最终分类精度,通过多次尝试得出结论:多源数据宜采用统一的最优分割尺度,且该最优分割尺度应基于空间分辨率最高的数据源获取,因为该类数据源拥有更精细的空间特征,可将地面地物分为更一致的对象。因此,本文首先获取无人机数据的最优分割影像,再将其余影像基于无人机的分割结果进行重采样和分割,获取统一的分割后影像。分割后的影像会产生对象,基于对象进行随机森林分类,即为0B-RF 分类算法。随机森林方法由Breiman L[34]提出,核心算法原理为决策树,由于采用多棵决策树来随机预测和建立模型,故形成随机森林。在给定的训练样本中通过N次有放回的抽取操作,获得N个训练样本集,然后从每个训练样本集中随机选取m个(m≤M,M为特征影像总数)特征影像,单个决策树通过特征影像包含的数据信息进行生长分裂,获取N棵决策树;最终单个对象分类结果由N棵决策树的分类结果来投票决定。该方法可加大分类模型之间的差异性,提高模型的泛化能力,比其他传统分类方法具有明显的优势。
决策树个数是随机森林算法的一个关键参数,主要依靠先验知识设置,本文根据多次尝试并参考已有研究成果[15,17-19,22],同时考虑时间效率(参数越大运行速度越慢),以50、100和150为待选参数,由实验结果(图3)可知,当参数为50 时平均分类误差变大,而当参数为150 时,平均运行时间大大增加,综合考虑,决策树个数选取为100。

图3 不同决策树个数表现参数图
2.6 精度评价
本文采用混淆矩阵进行精度评价[15,18],确定总体以及每一类地物的分类精度。混淆矩阵可提取总体精度(OA)、Kappa系数、用户精度、制图者精度4个指标来定量描述精度结果,各指标的计算公式为:
式中,N为像元总数;Pii为第i类地物被正确分为第i类的个数;Pi+为分类后样本中被分为第i类地物的像元总和;P+i为验证样本中第i类的像元总和。
3 实验结果分析
根据6种特征组合方式进行OB-RF分类,提取研究区6 类用地,提取结果见图4,分类后各种精度评价见表4、5,可以看出:①6 种特征组合方式的分类精度均在0.85 以上,其中分类效果最差的为组合6,分类效果最好的为组合3,说明本文采用的OB-RF分类方法在特色村镇地物类型提取方面具有较高的适应性和可信度,为后续特色村镇地物类型研究提供了一个可行的研究思路;②组合1~4 的分类精度整体高于组合5、6,说明多源数据较单一数据源可以较好地提升最终分类精度;③对于组合1~4,组合4的分类精度最低(0.920 5),组合3的分类精度最高(0.950 2),表明对于高分和多光谱结合的多源数据而言,多光谱数据提供的光谱信息越丰富,分类精度就越高,本文中高分数据的空间光谱信息与多光谱数据的指数合成影像结合(组合3)可使多源数据的优势最大化;④基于组合3的分类结果,进行6 类用地用户精度和制图者精度评价,用户精度最高的是林地(0.973 6),最低的是耕地(0.801 4),表示该分类结果中林地的可信度最高,耕地的可信度最低,制图者精度最高的是林地(0.985 1),最低的是园地(0.866 6),表明园地最易被漏分,综合用户精度和制图者精度来看,6类用地均具有较好的区分性,与周围地物差异明显,获得了较好的分类效果;⑤虽然组合3 整体精度最高,但耗时也最长,这是因为组合3的特征个数较多(71个),随机森林方法的分类速度会随着特征个数的增多而明显下降,因此若对分类精度要求不高,耗时较短的组合2、4也是很好的选择。

图4 6种特征组合方式分类结果
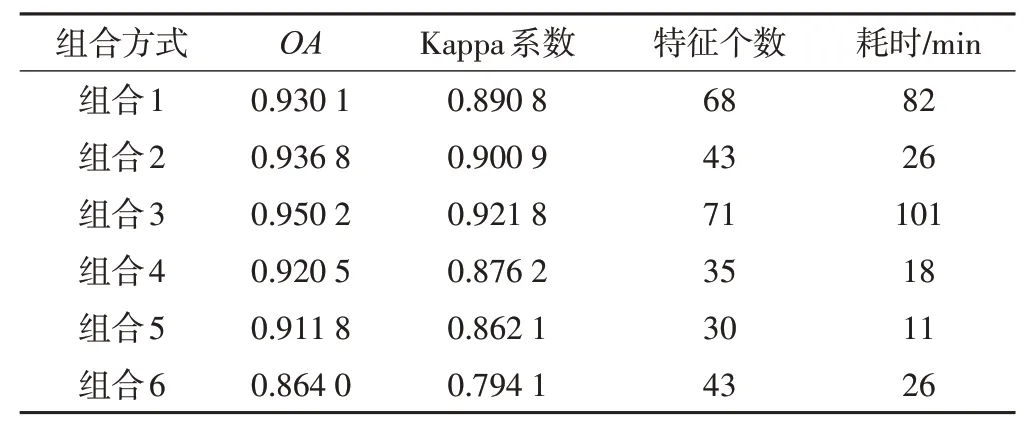
表4 6种特征组合方式精度评价
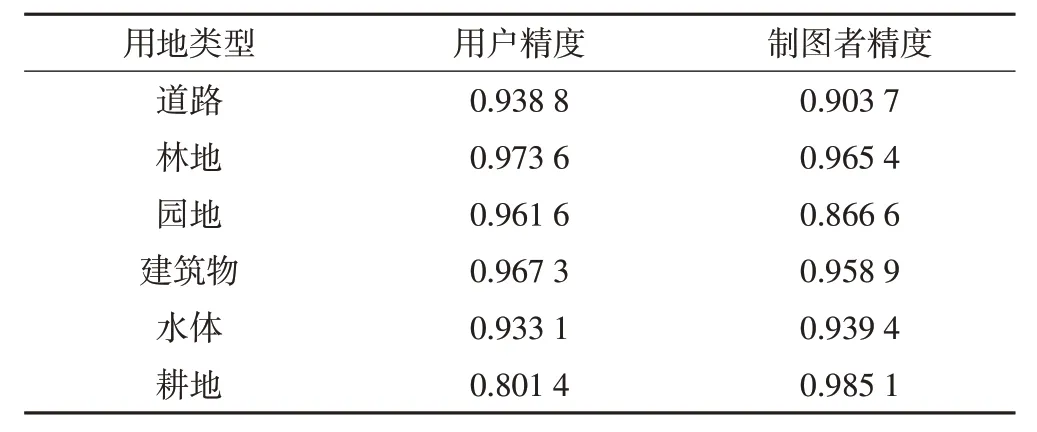
表5 6类用地的用户和制图者精度评价(基于组合3)
此外,为了验证本文提出的最优组合3 在不同分类算法下的鲁棒性,选择在相同条件下,分别基于支持向量机(SVM)、马氏距离(MDC)和平行六面体(PC)算法进行6类特征组合分类,结果见表6,可以看出:①本文采用的OB-RF算法的分类精度整体优于其他算法,因此可将其作为后续特色村镇地物提取算法的优势选项;②组合3在SVM和MDC算法中的分类精度排序最高,在PC 算法中的分类精度排序第二,但与排序第一的组合4 也相差无几,说明组合3 在不同的分类算法下均可提供出色的分类效果,具有较强的鲁棒性,可为后续相关研究提供可靠的借鉴。

表6 不同方法的分类精度对比
4 结 语
随着各类特色村镇的蓬勃发展,村镇各类用地信息的及时获取与更新势必成为一个新的遥感研究方向,准确快速地获取村镇地物信息具有重要的研究意义。本文在多源数据的基础上,设计了6 种数据组合方式,并基于OB-RF分类算法探讨了最优数据融合方式。结果表明,本文采用的OB-RF算法在特色村镇地物提取上的分类精度普遍优于其他算法;多源数据融合分类精度高于单一数据源;充分融合无人机影像的高分特征和多光谱影像光谱特征的组合3 在特色村镇用地分类上具有最高的分类精度,且通过验证可知,其在多种其他分类算法上也具有较好的分类效果、鲁棒性好。整体来说,本文的研究内容可为后续类似地物提取提供一个较可靠的数据选取和算法选取思路,具有一定的适应性和推广性。
猜你喜欢
睿士(2023年2期)2023-03-02
今日农业(2020年22期)2020-12-14
今日农业(2019年14期)2019-01-04
电子制作(2018年11期)2018-08-04
意林(2018年3期)2018-03-02
厦门理工学院学报(2016年1期)2016-12-01
测绘科学与工程(2016年5期)2016-04-17
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
学习月刊(2015年10期)2015-07-09
电子设计工程(2015年3期)2015-02-27