
测量机器人自动化监测在隧道工程中的应用
2024-03-29 07:52张文静
天津建设科技 2024年1期


【摘 要】:针对传统测量技术不能满足地铁隧道监测需求的现状,以实际工程为例,介绍了测量机器人自动化监测的基准点、布测点布置方案及监测精度;通过与人工测量数据的对比,证明测量机器人自动化监测具有精度高、实时处理、可视化显示、可靠性强等优点。
【关键词】:机器人;自动化监测;地铁;隧道
【中图分类号】:U231.1【文献标志码】:C【文章编号】:1008-3197(2024)01-22-03
【DOI编码】:10.3969/j.issn.1008-3197.2024.01.007
收稿日期:2023-02-27
课题项目:中铁第六勘察设计院集团有限公司测绘院科技开发重点项目(CHKY-2022-06)
作者简介:张文静(1990 - ), 女, 硕士, 河南洛阳人, 工程师, 从事地铁隧道监测与测量工作。
Application of Automatic Monitoring of Measuring Robot
in Subway Tunnel Protection
ZHANG Wenjing
(China Railway Liuyuan Group Co. Ltd. , Tianjin 300308, China)
【Abstract】:In view of the situation that traditional measurement technology can not meet the needs of subway tunnel monitoring, this paper introduces the reference point, layout scheme of measuring points and accuracy of automatic monitoring of measuring robot in subway tunnel through actual project, which proves by comparing with manual measurement data that the automatic monitoring of the measuring robot has the advantages of high precision, real-time processing, visual display and strong reliability.
【Key words】:robots;automated monitoring; subway; tunnel
在地铁隧道保护区内施工,势必会对地铁产生一些不可预测的影响,如果没有及时了解隧道安全变化,会给下一道工序的施工以及地铁未来的运营埋下安全隐患;及时、有效、不间断掌握施工对地铁隧道的影响是确保地铁隧道的稳定性和安全性关键,国内外许多学者对地铁监测方法进行了研究。付翔宇[1]利用徕卡测量机器人的开发平台研发了一套通用的自动化观测软件,使测量机器人能够实现自动观测、自动记录数据,提高了工作效率。蒋晨[2]研究了測量机器人TM30在地铁变形监测中的应用,重点研究了测量机器人的数据预处理等问题。贺磊等[3]对测量机器人自动化监测进行了详细的介绍,验证了其监测精度,证明了测量机器人的可靠性。靳羽西等[4]利用多台测量机器人对地铁隧道进行监测,克服了传统方法效率低、数据滞后的弊端,解决了一站式无法进行长距离监测的问题,实现了对地铁隧道实时、高效、高精度的监测。He G Z 等[5]研究了三维激光扫描在地铁隧道变形监测中的应用,地铁隧道三维模型不仅提高了变形监测的精度,而且也反映了整体变形趋势。国内外学者对于测量机器人在地铁监测中缺少在数据采集、处理、传输、分析等方面更系统的应用方法。
在地铁隧道变形监测中,对于监测条件要求高的项目,需要进行连续的、实时的监测,常规手段已经不能满足工程的需要。本文以实际工程为例,利用机器人自动化监测技术实时监测了联通通道施工对地铁隧道的影响,同时与人工监测进行对比。
1 机器人自动化监测技术
机器人自动化监测技术主要由布设于隧道内的监测设备和布设于办公室的远程控制设备组成,利用自动变形系统控制测量机器人进行自动变形监测及对监测过程中所采集的数据进行管理与处理。在系统中新建一个数据库文件,保存该变形监测项目的所有数据,对系统进行初始化设置,监测前以人工监测模式对所要测量的点位进行初始的学习测量,设置观测时间及频率,以便机器人实施无人值守的自动观测;当目标被遮挡及测量超限时智能化地处理目标点坐标的计算和后续的变形分析,实时显示变形趋势图,测量数据报表输出。
2 工程概况
某下穿高铁站送客匝道桥地下联通道长约101.2 m,标准段净宽8 m、局部净宽14.5 m,单层单跨矩形结构(局部单层双跨);下面为正在建设的地铁2号线隧道暗挖区间。通道采用明挖法跳仓施工,围护结构为放坡+土钉墙。鉴于地铁隧道处于设备安装及调试阶段,多部门作业交叉影响较大,周围环境复杂,采用测量机器人自动化监测对涉及地铁隧道区域进行监测。
3 自动化监测方案及实施
3.1 测点布置
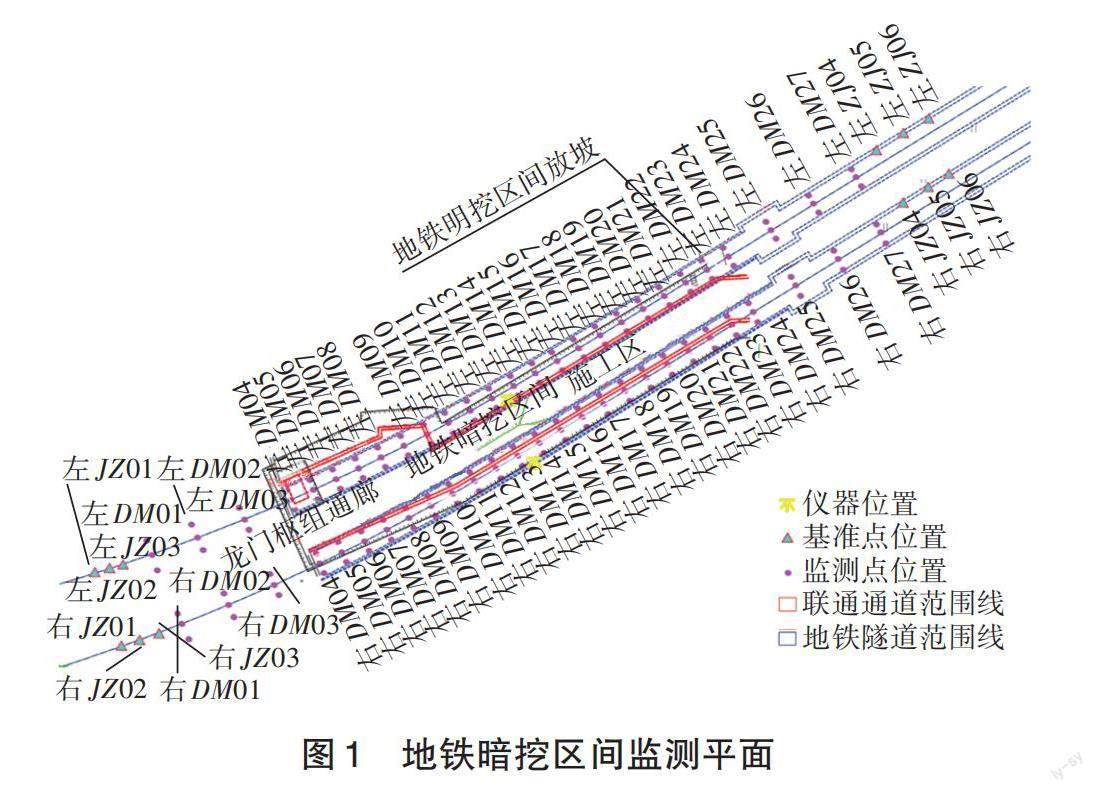
通道底板与暗挖区间的净距为2.03~3.32 m,对应地铁2号线里程右DK22+460.861(左DK22+455.077)—右DK22+562.061(左DK22+556.277),两端向外各延伸30 m,断面布设范围分别为161.2 m(上行左线)、161.2 m(下行右线),共计布设54个监测断面(左DM01—左DM27和右DM01—右DM27)。为实时获取测站点精密三维坐标,在测站两侧、施工影响范围之外,布设8个基准点。基准点为整个系统提供稳定不动的参照系,采用Leica GDR1圆棱镜,基准点应埋设稳固,保证整个监测过程中不受破坏。监测点采用Leica L型棱镜,用膨胀螺丝固定在隧道壁上,并使棱镜面正对测站。每个监测断面布设4个监测点,均匀布设在道床和结构上。根据现场条件实施调整,保证不影响行车安全且在通视条件良好的位置布设[6]。见图1。
3.2 自动化监测
3.2.1 数据处理
1)沉降。获得各管片监测点的高程,计算各个监测点的沉降值。
式中:[?Hi]为沉降值;[Hi]为第i次测量的高程;[Hi-1]为第i-1次的高程。
2)水平位移。获得各监测点的平面坐标,根据平面坐标的变化获得隧道横向和纵向位移。
式中:[?Xa]为a点两次监测期的横向位移量;[?Ya]为a点两次监测期的纵向位移量;[Xai]为a点第i次监测获得的X坐标;[Xa(i-1)]为a点第i-1次监测得到的X坐标;[Yai]为a点第i次监测得到的Y坐标;[Ya(i-1)]为a点第i-1次监测得到的Y坐标。
3)管片收敛。利用各监测点的三维坐标数据反算测点间水平和竖向距离,然后与上次的测量值进行比较,较差为本期水平和竖向收敛值。
式中:[xa、ya、ha]为监测点a的三维坐标;[xb、yb、hb]为监测点b的三维坐标;[Si-1]为上次测量隧道内径值;[Si]为本次测量隧道内径值;D为隧道收敛量。
3.2.2 监测精度
隧道各监测对象监测精度见表1。
3.2.3 预警标准
根据CJJ/T 202—2013《城市轨道交通结构安全保护技术规范》要求,分为A、B、C、D四级预警进行反馈和控制。见表2。
3.3 监测结果
3.3.1 隧道结构竖向位移
在联通通道施工过程中对断面15的影响最大且此断面处于影响范围的中间位置。人工测量和自动化监测此处竖向位移累计最大值分别为-1.4、-2.09 mm,监测数据较为一致,沉降趋势相同。联通通道施工对隧道的影响较小,地铁隧道处于安全稳定状态。见图2。
3.3.2 隧道结构水平位移
施工在水平位移上对隧道的影响不大,隧道处于安全可控状态。人工测量值和自动化测量值较差最大为1.0 mm,两者变化趋势相似,表明两种测量方法在隧道水平位移监测中具有较好的一致性。见图3。
3.3.3 隧道结构径向收敛
施工对隧道管片產生了一定影响,但在可控范围内。人工测量值和自动化测量值较差最大为1.4 mm,两者变化趋势相似,表明两种测量方法在管片收敛监测中具有较好的一致性。见图4。
4 结论和建议
机器人自动化监测技术在地铁隧道保护监测中可以实现全天实时监测,能够提供完整性的监测信息,确保后续数据处理、分析和传递的效率,为监测工作的科学性和高效性创造了良好的条件,人工数据与自动化数据的对比也表明自动化监测的可行性。不足之处是对于未运营的地铁隧道,由于存在多工种交叉作业,在进行自动化监测过程中需要多次人工复核,以免监测过程中会受到列车运行和工作人员的干扰。对变形量较大和突变的数据进行人工复核,可以最大限度的消除外界干扰,以确保数据的稳定性和真实性。
参考文献:
[1]付翔宇.TCA2003测量机器人的开发与应用研究[D].北京:北京建筑工程学院,2008.
[2]蒋 晨.测量机器人在线控制及其在地铁隧道自动化监测中的应用[D].徐州:中国矿业大学,2015.
[3]贺 磊,许诚权,陆晓勇,等.测量机器人自动化测量在地铁结构变形监测中的应用[J].城市勘测,2015,(1):137-139.
[4]靳羽西,纪万坤,孙立坤.多台测量机器人监测系统在地铁隧道中的应用[J].北京测绘,2020,34(10):1338-1342.
[5]He G Z,Yang J.Deformation Monitoring for subway Tunnels Based on TLS[J].Advanced Materials Research,2013,864-867(864-867):2744-2749.
[6]陈庆华,李 锋,赵 磊,等.自动化监测技术在地铁基坑工程监测中的应用分析[J].新型工业化,2021,11(8):112-113.
猜你喜欢
课堂内外(小学版)(2023年4期)2023-09-22
军事文摘(2022年8期)2022-11-03
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
小学科学(学生版)(2021年3期)2021-04-13
哈哈画报(2021年11期)2021-02-28
水电站设计(2020年4期)2020-07-16
小读者(2019年24期)2019-01-10
中华老年口腔医学杂志(2016年1期)2017-01-15
小天使·四年级语数英综合(2016年11期)2016-11-29
