
基于无人机摄影测量的大比例尺地形图测制关键技术
2024-03-27 07:42:04李淑敏
工程建设与设计 2024年4期
李淑敏
(庆阳市自然资源局,甘肃 庆阳745000)
1 引言
数字城市建设对于国民经济的影响越来越大, 同时日新月异的城市面貌对于大比例尺地形图的测制提出了更高的要求。 传统的大比例尺地形图的测制受限于精度、作业效率以及成本等,已经无法适应当前社会经济的发展需求[1-3]。 近年来,无人机技术的迅猛发展,为测绘领域带来了发展的机遇,搭载测绘设备的无人机摄影测量技术逐渐发展起来, 成为测绘技术领域中的新势力[4]。无人机摄影测量从本质上属于数字摄影测量技术领域,区别于传统的技术,数字图像是无人机摄影测量技术的信息源,其对信息源的处理是基于数字图像展开的,同时反馈的结果也是数字产品。 图像目标的识别是对输入的图像进行解释,再以可描述的图像予以输出,图像处理技术则主要通过相关的计算机软件展开,包括对数字图像的压缩、增强、编码、边缘检查、分割以及恢复等。 无人机摄影测量系统的组成部分,主要是由控制无人机飞行轨道的飞行控制构件、飞行平台以及图像的处理系统等若干个系统组成的[5-6]。 将无人机摄影测量技术应用到大比例尺地形图的测制中仍需要解决几个问题:误差的控制要满足大比例尺地形图的精度要求;自动空中三角测量以及影像匹配等。 基于此,本文对在大比例尺地形图中应用无人机摄影测量的关键技术展开了讨论与分析,研究结果旨在为大比例尺地形图的测制提供技术参考。
2 无人机摄影测量关键技术分析
2.1 误差控制
无人机摄影测量技术的误差来源主要是摄影测量系统,具体包括人为操作误差、 仪器设备自限性误差以及外界不确定性因素误差等。 外界不确定性因素需要具体问题具体分析,本文对此不做过多的讨论, 主要对仪器设备自限性误差及人为操作误差进行必要的分析。 由于光敏传感器的电路单元具有非正交性、弱失真以及非平方比的特点,所以,在立体图像的获取中由于电路的放大与修改图像失真, 进而导致测量精度降低。 对此,可以利用数字失真差异校正模型对图像进行调整,畸变差在像坐标系中的修正如式(1)所示:
式中,m,n 为像点坐标,Δm 和Δn 分别为像点的修正值;m0,n0为像主点坐标,l 为像点(m,n)与像主点(m0,n0)之间的距离,即畸变半径,l2=(m-m0)2+(n-n0)2,a1和a2是畸变系数(镜像);b1和b2是畸变系数(切向);g 为非正交性畸变系数(CCD 阵列排列);s 为非正方形的比例因子(像素)。
在人为操作误差控制方面, 相关研究表明, 调整摄像设备,使CCD 阵列的短边与航线方向形成垂直关系,由此可以使摄影测量的精度得到大幅提高。 在大比例尺地形图的测绘过程中, 测量精度与比例尺关系密切, 从误差控制的角度出发,可以根据识别焦距确定比例尺。
2.2 空中三角测量
常用的空中三角测量方法包括模拟法、 数字法以及解析法等,其中,解析空中三角测量一般包括航带法、模型法以及光束法3 种。 航带法是对一条航带的立体模型进行拼接,在测设区域内的重叠部分中选择布设公共控制点, 并基于整条航带对平差单元开展其余各个航带的修正数, 而后开展控点加密及坐标求解,对整个测设区域进行整体平差。 光束法的平差单元的选择则是基于某图片的某一光线, 平差方程的建立也是基于中心投影的共线方程。 基于实现公共点的光理想交汇对各个光束的三维空间的外方位元素的旋转及平移, 利用误差方程式计算平差。GPS/IMU(POS 系统)辅助空中三角测量克服了对庞大控制点数量的依赖缺陷,实现了基站GPS 与无人机GPS 的连续且同步的测量, 基于修正计算结果修正无人机的定位,然后利用惯性测量单元(IMU)计算获取近似外方位元素,联合GPS 进行平差,得到外方位元素相对较高的精度值。
2.3 影像匹配
影像匹配的方法有多种方式,其中,基于特征的影像匹配应用最为广泛。 特征提取一般需要选择图像中的特点显著的点或线, 以特征参数数据的形式体现。 点特征的提取方法较多,应用较为广泛的是Harris、Moravec、Forstner 以及Susan 算子。BRISK 匹配算法在特征描述方面具有显著优势,具体步骤包括尺度空间的建立、特征点的加测、亚像素的插值、高斯滤波、梯度计算以及特征描述等。 此外,SIFT 匹配算法具有可扩展性强、信息丰富以及运行速度高的优势,自2004 年提出以来便被冠以稳健的标签, 其步骤包括基于高斯滤波的尺度空间的建立、尺度空间极值点的探测、关键点的定位、关键点梯度主方向及大小的确定以及关键点区域特征的描述[7-8]。 将两种匹配算法相融合的BRISK-SIFT 匹配算法兼容了各个算法的优点,可以更加准确地对特征点进行描述与匹配,其步骤包括利用SIFT 算法对特征点进行提取, 然后利用BRISK 算法对特征点进行描述,最后进行特征点的匹配。
3 大比例尺地形图测制关键技术
本文以某高校大比例尺地形图测制为例, 探讨无人机倾斜测量、无人机摄影测量的大比例尺地形图测制关键技术。
3.1 像控点布设设计
在布设像控点时,一般从整体测区出发,选择开阔的易读的区域,当自然环境中缺乏有效标识时,可以选择人工布点的方式。 强磁会对测量造成干扰,布设像控点时要注意避让,同时避免在建筑物密集区域布设,一般建议布设在重叠度相对较高的区域。 在大比例地形图的布设过程中,可以选择3 个角点作为控制,然后加密像控点,从而达到提高精度的作用,一般来讲,像控点的密度越大,精度越高。 采用GPS-RTK 法开展大比例地形图像控点的施测是当前的一种主要形式。 在本文案例测量工程中,由于缺乏有效标识,选择了人工布点的方式。
3.2 影像质量检查
无人机摄影测量的质量主要取决于误差,其中,测量设备受到天气条件及飞行环境的影响是较为随机的,所以,需要对影像质量进行检查,一般包括影像重叠度、航带弯曲度、航带内最大高差以及像片旋转角等,60%~80%是影像重叠度较为合理的区间。在本文案例测量工程中采用的是飞马D200 无人机。
无人机在飞行过程中,会受到天气及气流的影响,将会在预定轨迹的基础上产生一定量的偏移,所以,必须对航带的弯曲度提出一定的限制, 航带弯曲度需小于航测规范所规定数值(3%)。
同理,无人机在飞行过程中,受到天气及气流的影响,会在预定高度的基础上产生一定量的偏移,所以,必须对航带的高差提出一定的限制,一般要求规划航高与飞行航高、最大最小航高差均不超过50 m,且相邻影像的航高差不超过30 m。
另外,由于受到天气及气流的影响,无人机必须调整飞行姿态,由此产生偏航角和俯仰角,这会影响影像的重叠度,进而导致精度降低。 在航测过程中,倾斜角以不大于2°为宜,最大不应高于3°,旋偏角以不大于6°为宜,最大不应高于8°。
航向重叠度以及旁向重叠度、航线弯曲度、测量工程的航带高差、航片角值的示例见表1。
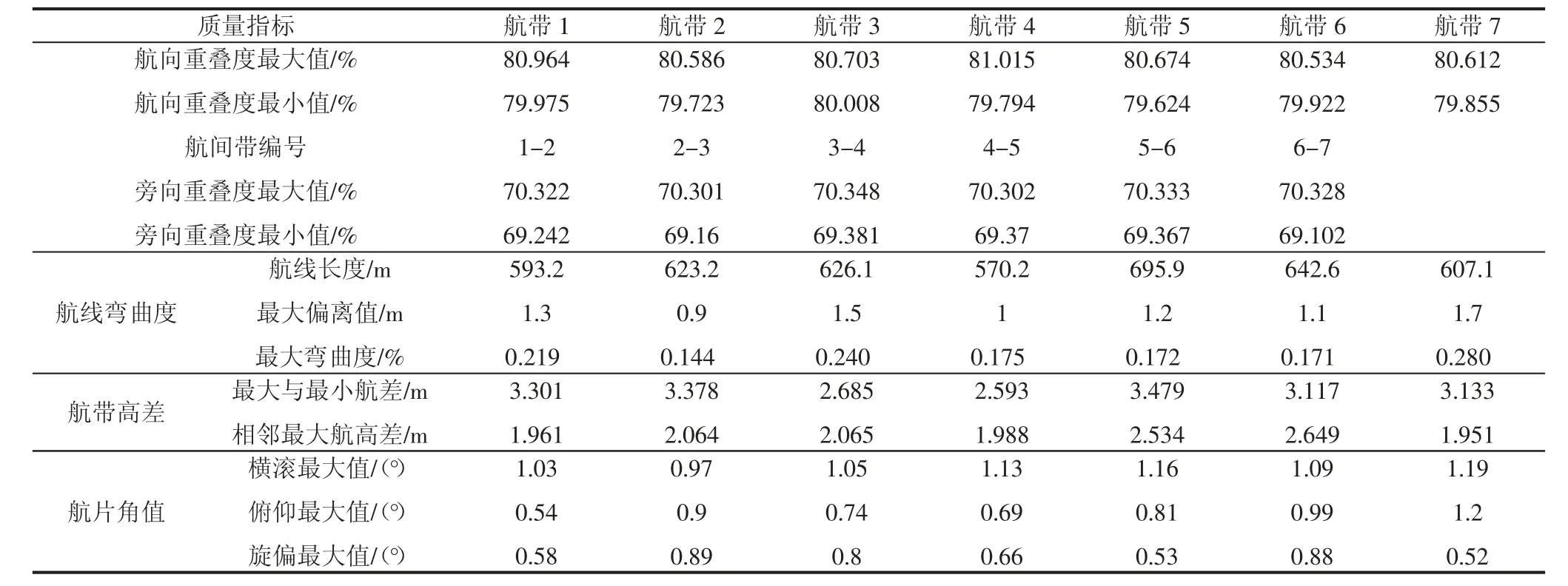
表1 实际飞行技术指标
3.3 数据处理
对影像开展匀光匀色处理后, 影像对测区的反应更加真实,而后利用Pic4D Mapper 对测量数据开展数据处理。 一般步骤包括:新建工程、初始化处理、控制点预测和测刺、重新优化、输出质量报告,待满足精度要求后输出空三精度报告,点云与纹理输出三维点云三维模型、DSM 正射影像图及指数、DOM 编辑及成果输出。在倾斜数据的处理中,Context Capture是目前该领域较为突出的软件,包括Viewer、Engine 和Master 3 大模块,其中,Viewe 则是模型的浏览工具,Engine 作为软件运行基础,是引擎端,Master 是人机交互界面。 基于EPS 的数字线划图, 绘制线的收集方法包括三维倾斜显示以及垂直摄影三维显示两种,具体的数字划线步骤是首先新建工程,需要根据大比例尺地形图的要求设置相应的收集模板,例如,在本文案例工程中,无人机摄影时采用的比例尺是1∶5 000,则在数据收集模板中相应地选择1∶5 000 的模板;其次是生成及加载模型,加载方法要依据数据源分类选择,一般包括倾斜摄影和垂直摄影;再次是地形要素的采集;最后是数据的检查及图形的输出,图形输出大都采用CASS 的软件进行输出。
4 结语
本文对在大比例尺地形图中应用无人机摄影测量的关键技术展开了讨论与分析, 介绍了无人机摄影测量中的误差控制、空中三角测量及影像匹配,并重点介绍了大比例尺地形图测设过程中的像控点布设、 影像质量检查以及数据检查等关键技术,并对该技术的价值体现进行了分析。 本文得到的主要结论有: 人为操作误差以及仪器设备自限性误差可以通过相应的修正公式予以修正,合理的像控点布设、影像质量检查及数据处理可以实现大比例尺地形图测制的高精度及高效率;基于无人机摄影测量的大比例尺地形图测制的价值体现集中在作业的高效率、高精度及高安全性上。
猜你喜欢
今日农业(2021年8期)2021-11-28 05:07:50
今日农业(2021年13期)2021-11-26 11:50:54
现代畜牧科技(2021年3期)2021-07-21 08:41:50
落叶果树(2021年6期)2021-02-12 01:29:26
测控技术(2018年10期)2018-11-25 09:35:40
电子制作(2018年11期)2018-08-04 03:25:38
中小企业管理与科技·下旬刊(2017年7期)2017-08-24 02:13:53
测绘科学与工程(2016年5期)2016-04-17 06:51:15
电子设计工程(2015年3期)2015-02-27 12:03:45
河南科技(2014年14期)2014-02-27 14:11:53
