基于三维点云数据的城市绿地植被参数评估体系研究
——以唐山市唐丰南路为例
2024-03-18 10:44方云杰盖振宇尹海伟仲启铖
园林 2024年2期
方云杰 盖振宇 尹海伟* 牛 萌 仲启铖
(1.南京大学建筑与城市规划学院,南京 210093;2.中国城市建设研究院有限公司,北京 100032;3.上海市园林科学规划研究院,上海 200232)
传统植被指标的测量方式需要消耗大量的人力、物力与时间,且忽视了不同植被类型和结构的生态效益影响。基于点云数据能够有效评估城市绿地三维植被参数,但受制于数据精度、算法软件等因素影响,该方法结果精度存在10%~20%的误差。以唐山市唐丰南路为例,选取了三处典型样地(50 m × 50 m),进行无人机遥感影像和手持激光雷达数据采集,从单木尺度和样地尺度构建三维植被参数体系,以融合数据为准,对比分析了无人机点云数据和手持激光雷达点云数据在提取各项植被参数的精度。对无人机点云数据中的单木数量、总冠幅面积、乔木层绿量、灌木层绿量、平均三维绿量密度、郁闭度、间隙率和叶面积共8项参数,手持激光雷达数据中的平均树高、平均冠径、平均冠幅面积、乔木层绿量和平均三维绿量密度共5项参数,分别提出了修正系数,以提高结果精度,为后续研究提供帮助。最后,探讨了无人机摄影测量技术和激光雷达技术在未来可能的应用方向。
无人机;摄影测量;激光雷达;数据融合;三维植被参数
在快速城镇化的进程中,高强度的开发建设活动导致土地利用格局变化,城市绿地斑块破碎化,岛屿化程度逐渐增大,导致生物多样性降低,生态功能受损[1]。加强生态保护、推进生态文明建设及保障生态安全已经成为人们共识,城市绿地是提升城市品质的重要抓手。城市绿地植被调查能够有效获得研究区的植被信息,因此至关重要。
传统植被结构的获取方法一般需要进行大量的实地调查,需要耗费大量的人力、物力与时间。摄影测量技术具有采集效率高、使用成本低、获取影像速度快且分辨率高等优点。董新宇等[2]利用无人机遥感影像提取油松林区和樟子松林区的单木树冠信息。提取精度分别达到81.90%和95.65%。Panagiotidis等[3]根据高分辨率无人机图像进行树高和树冠直径的估测,将无人机测量结果与地面测量结果对比验证精度,RMSE%值分别在11.42~12.62和14.29~18.56。Zarco-Tejada等[4]利用无人机获得的高分辨图像进行树木高度量化,估算树高的验证评估结果为R2,其值为0.83,相对均方根误差(R-RMSE)为11.5%。此外,随着LiDAR技术的逐步成熟,使得植被垂直方向覆盖及其定量指标获取成为可能,极大推动了生境多样性立体化定量评价的研究工作[5]。李肖肖等[6]基于背包式激光雷达对城市绿地树木的三维绿量进行了估算,其结果表明相较于传统方法相对误差在10.7%~33.7%,平均相对误差为20.9%。Huang等[7]将机载激光雷达数据的三维信息与高分辨率遥感影像中植被信息结合,计算上海陆家嘴地区的绿量体积,相对准确率高达95.26%。Cao等[8]使用无人机高光谱图像对红树林物种进行分类,KNN和SVM的总体分类准确率分别达到82.09%和88.66%。不难发现,无论是无人机遥感影像还是地基雷达数据进行的植被结构的提取时,总会与实际数据都存在一定范围的误差,影响后续研究的精度。
综上所述,无论是无人机遥感影像还是激光雷达技术,其提取树木信息的精度通常达到80%以上,已满足实际应用需求,但与实际树木数据还存在一定的差异。当前研究主要集中于实地调研数据与无人机激光雷达数据或地基激光雷达数据的对比分析,缺少对于无人机遥感影像数据、移动式激光雷达数据和二者融合数据之间的比较研究。因此,本文以唐山市唐丰南路为研究对象,利用无人机遥感影像数据和手持激光雷达数据,获取研究区的三维点云数据,评估三维绿地植被参数,通过分析无人机、手持激光雷达以及二者融合后的点云数据三者间的误差精度,计算修正系数以解决无人机遥感影像和手持激光雷达仪器空地双视角下采集数据的误差问题。旨在探讨能否通过比较不同数据的偏差,获得一个修正系数区间,为今后采用无人机遥感数据或手持激光雷达数据的研究提供帮助,通过点云数据获得更加精准的三维植被结构数据,降低实地调研的成本并提高数据获取的精度与效率。
1 研究区概况
唐山市是河北省的重点城市,地处河北东部、华北平原东北部,南临渤海,北依燕山,毗邻京津,是华北与东北通道的咽喉要地,位于东经117°31′–119°19′,北纬38°55′–40°28′之间,总面积为13 472 km2。唐山市地形由北向南呈梯形下降趋势,包括山地丘陵、沿海平原两大地貌区。唐山市属暖温带半湿润季风型大陆性气候,年平均气温12℃左右,常年平均降水量500~700 mm,主集中在7、8月。唐山市物种资源丰富,北部地处山区,森林茂密,植被覆盖度高。
本次研究以唐山市唐丰南路为对象,唐丰南路是当前唐山市进行生态修复与建设的典型生态廊道(图1)。选择唐丰南路段进行调研与数据采集,一方面可以了解设计项目施工建设前的生态情况,另一方面可以与建设后的生态效益情况进行对比,验证生态修复措施的有效性。同时还可以了解唐山当地普通绿地的生态状况。

图1 研究区Fig.1 Study area
2 数据与研究方法
2.1 数据收集与处理
本文选取了唐丰南路的三处样方进行调研及数据采集。补充样方基本信息:样方面积、样方地势平坦程度和植被基本情况。研究的实验数据采集于2023年5月19日和5月20日,天气晴朗无风,期间树冠层无明显位移。实验的遥感影像由无人机(DJI悟INSPIRE 2)采用自动巡航的方式,影像重叠率保证大于70%,飞行速度大约5 m/s,飞行高度设定为60 m,智能采集获取研究区的遥感影像信息。手持激光雷达数据由手持移动激光扫描仪(LiGrip H120)分别对三处研究样地进行扫描获得。在扫描前,根据样地内植被的范围大小和树木的具体分布,采取慢行走蛇形扫描线路,扫描高度为1.5~2 m。同时,在扫描过程中保持匀速通过扫描区域,以提高扫描的精度和可靠性。此外,为将样区点云数据添加投影坐标和垂直坐标系,需使用移动站RTK(UniStrong G970 II)记录控制点准确位置。
本研究采用专业的激光雷达点云数据处理和分析软件LiDAR360(5.2版本)、基于影像自动生成高质量三维模型的软件PhotoScan Pro(1.4.5版本)作为处理点云数据和计算植被结构参数的工具。无人机点云数据利用PhotoScan Pro软件获得,首先对无人机采集的图像数据进行图像质量评估,移除质量较差的照片;然后选择对齐照片功能,构建疏点云模型;最后生成可视化的密集点云模型,获得无人机采集的三维点云数据。对于手持激光雷达点云数据,先对手持激光雷达仪器采集到的数据进行数据解算,再添加RTK采集像控点的绝对坐标,进行数据拼接等一系列预处理,最后获得点云数据。对上述得到的无人机点云数据与手持激光雷达点云数据进行空间配准,再进行数据融合,得到相对完整的三维点云数据。根据采集区数据大小以及植被分布情况等因素,决定对三个样区分别选取50 m×50 m的样地区域(图2)。对原始数据进行重采样,减少不必要的点云数据;去除采集过程中产生的噪点;提取地面点并进行归一化处理;乔灌草植被点分层等一系列处理。
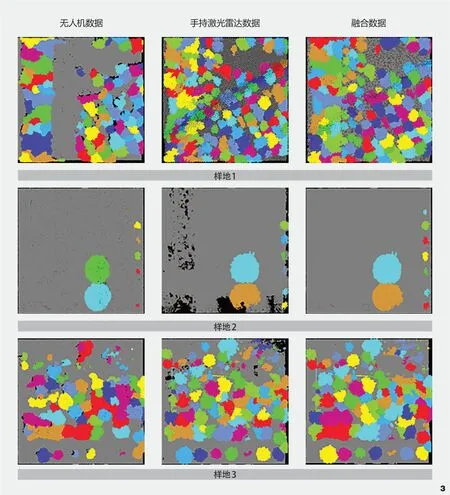
图3 样地无人机、手持lidar数据和融合数据单木分割结果Fig.3 The results of single-wood segmentation of UAV, handheld LiDAR data and fusion data in sample
2.2 植被参数体系构建
传统二维指标作为城市绿地的评价标准,存在明显的局限性。低矮灌木、草坪、乔灌草、行道树等不同类型的植物与分层结构所产生的生态效果是截然不同的[9]。随着LiDAR技术的逐步成熟,使得植被垂直方向覆盖及其定量指标获取成为可能。Næsset等[10]利用小型足迹激光扫描仪分别测算了幼龄林和成熟林的平均树高、优势树高、平均直径、茎数等指标系数,并计算了其预测值与真实值的标准差。Nelson等[11]通过计算植被冠层顶部的点云与地面点云之间的距离估测出树高,并以此反演出生物量、郁闭度等植被参数;刘清旺等[12]利用机载激光雷达数据,提出了一种双正切角树冠识别算法,有效识别出单株树高和冠幅,树高的精度高达97%。韩文泉[13]利用激光雷达数据,获得了树高、树冠形状及被遮挡的灌木高度等多个城市植被三维结构信息。在三维绿量方面,陈自新等[14]提出以植物叶面积总量计算绿量的方法;周坚华等[15-16]采用以平面量模拟立体量的方法进行绿量计算,并首次使用绿量估算了绿化环境效益;刘常富等[17]采用立体量推算立体量的方法,对沈阳市城市森林三维绿量进行测算;朱文泉等[18]利用绿量回归模型,考虑了植被的冠幅和冠高,分树种逐株计算绿量。
近年来,越来越多的学者运用激光雷达技术提取绿地植被的三维参数,并分析其可行性。林业学者对于植被三维参数的研究最多,通常倾向于分树种逐株测算单木指数,包括单木胸径(DBH)、树高(Htree)、树冠直径(CD)、冠幅面积(CA)、树冠体积(CV)[19]、郁闭度(CC)、间隙率(GF)和叶面积指数(LAI)[20]等三维结构参数(表1)。规划学者关注于生态廊道三维参数的识别与生态网络构建,致力于提升物种多样性和植被生境的复杂性。研究的参数有冠层高度、冠层盖度、斑块面积、叶高多样性和三维绿量等[21]。风景园林学者通常关注乔灌草不同植物群落的生长状况,采用分层参数构建的方法:乔木层主要记录种名、数量、高度、胸径、冠幅、冠高、第一活枝下高度等;灌木层主要记录种名、数量、盖度、高度、冠幅、冠高等;地被层主要记录种名、高度、盖度等[22]。生态学者则侧重于物种多样性保护的研究,Simonson等[23]利用机载激光雷达分析植被垂直结构与物种多样性之间的关联,发现森林物种多样性与植被高度呈显著相关。
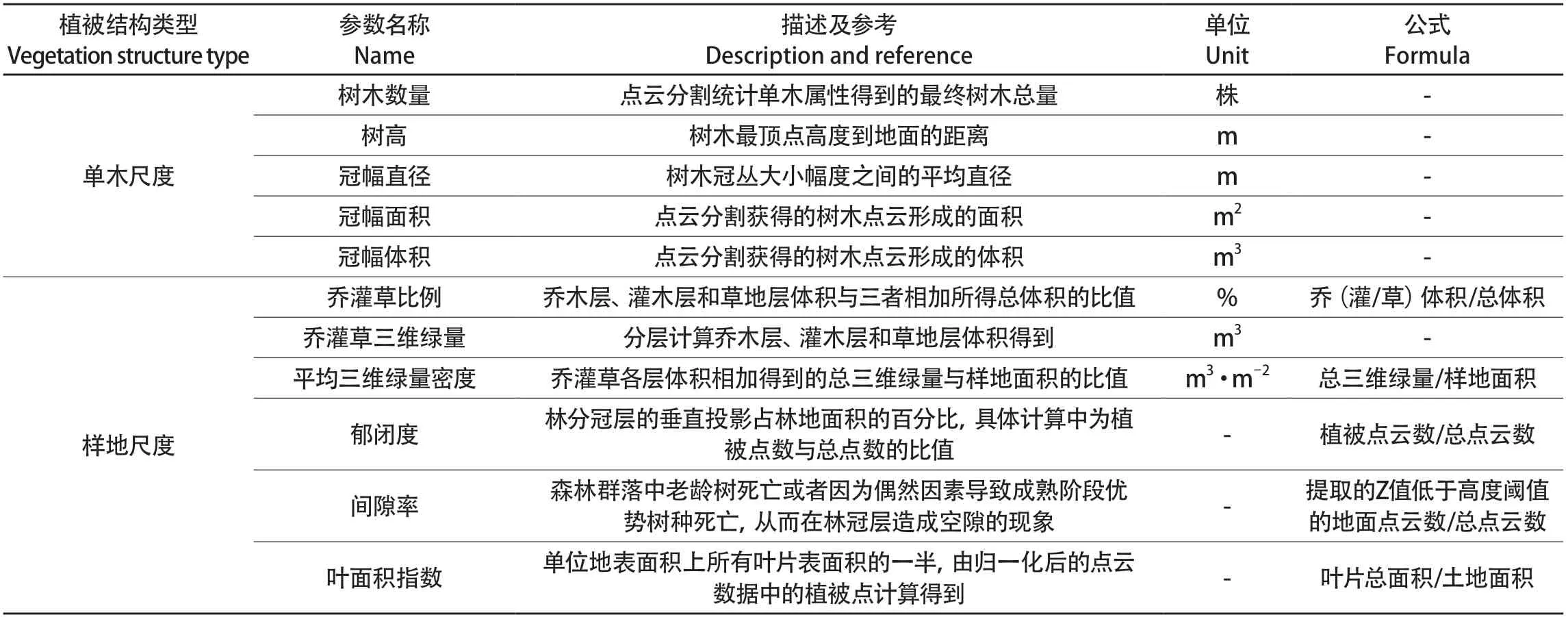
表1 三维植被参数体系Tab.1 Three-dimensional vegetation parameters system
与绿地率、绿化覆盖率、人均绿地面积[24]等二维参数相比,三维植被参数扩展了绿地植被的研究方向,可以更加精确地体现出绿地布局的合理性和植被的生态质量水平,对评价城市植被的生态效益产生重要作用[25]。综合前人学者对于绿地树木结构的研究,本文将从单木尺度和样地尺度两大方面构建植被参数体系。单木尺度的植被参数包括了单木数量、树高、冠幅直径、冠幅面积和冠幅体积等。样地尺度的植被参数包括乔灌草比例、三维绿量、平均三维绿量密度、郁闭度、间隙率和叶面积指数等。
2.3 研究方法
2.3.1 植被参数
单木尺度的植被参数利用LiDAR360软件中的点云分割操作,通过分析点的高程值以及与其他点之间的距离,确定点云中待分割的单木,获取每株单木的树高(tree height)、冠径(crown diameter)、冠幅面积(crown area)和冠幅体积(crown volume)等属性数据。具体方法参考Li等[26]开发出的点云分割算法,采取间距临界和最小间距原则,从全局极大值开始计算,将单棵树木自上而下从点云中一株一株地分割开。根据召回率、精度和F-score对结果进行评估,检测到86%的树(召回率),94%的分割树是准确的(精度),总体F-score为0.9。结果表明该算法在分割结构相似的混交林单株树方面具有良好的效果。
在样地尺度的植被参数中,与乔灌草三维绿量有关的计算采用分层测算法。关于三维绿量的计算方法,周坚华等[15]通过构建三维绿量模型逐株计算乔木和灌木的三维绿量,而地表植物的三维绿量则通过实测面积与高度的乘积来获得[27],最终乔木、灌木、地表的绿量之和即为总三维绿量[22]。余柏蒗等[28]研究表明草坪和灌木的分界值为0.5 m,灌木与乔木的分界值为1.8 m,乔木最大高度几乎没有超过12 m。根据相关文献和研究区的具体情况,设定草地层高度为0~0.5 m[9]、灌木层高度为0.5~2 m、乔木层高度为2~15 m,使用LiDAR360中的点云分类对数据进行分类。参考了分层测量的研究方法,对研究区的三维绿量采用分层计算的方法,分别计算乔灌草三种类型的绿量。草地层和灌木层的绿量通过分别计算低矮植被点和中等植被点的体积获得。而乔木层的绿量为研究区内单木分割得到的冠幅体积的数值之和。而郁闭度是林分冠层的垂直投影占林地面积的百分比,在森林经营管理中,郁闭度是确定抚育采伐强度的重要指标,也是进行森林蓄积量估测不可或缺的因子。通过计算植被点数与总点云数的比值获得。叶面积指数是表征植被冠层结构的基本参量之一,定义为单位地表面积上所有叶片表面积的一半,由归一化后的点云数据中的植被点计算得到。
2.3.2 修正系数
依据单木尺度和样地尺度各类植被参数的计算结果,根据公式(1),分别计算融合数据与无人机数据以及融合数据与手持激光雷达数据之间的偏差。通过分析对比不同数据之间的偏差大小,分别选取单木尺度和样地尺度的植被参数,计算修正系数,见公式(2)。
式中,n是偏差系数,α是融合数据的植被参数计算结果,β是无人机数据或手持激光雷达数据的植被参数计算结果。
式中,y是修正系数,n0是无人机数据或手持激光雷达数据偏差系数的平均值。
3 结果分析
3.1 单体植被参数计算结果
对于LiDAR360点云分割的结果进行统计,分别计算平均树高、平均冠径、平均冠幅面积和总冠幅面积等参数,比较融合数据与无人机数据以及融合数据与手持激光雷达数据之间的偏差。
从总体上看,利用无人机遥感数据进行的单木分割,在平均树高、平均冠径和平均冠幅面积三项参数上均优于手持激光雷达数据的统计结果,偏差在10%以内。而在树木数量和总冠幅面积统计结果上,手持激光雷达数据更有优势,偏差普遍较低,更能反映出当地实际树木分布状况。这与两者采集数据的方式有关,无人机通常自上向下扫描,更倾向于采集到植被上层结构,采集数据过程中易受到物体遮挡,对于中下层植被信息难以获取。而手持激光雷达数据则是以自下而上的方式采集获得,由于采集高度的限制,可能会缺少树冠顶层的数据。
从表2,表3具体来看,无人机数据中的样地1、2、3各个参数的偏差相似,其中树木数量的偏差在22.22%~29.67%之间,平均偏差为26.52%;总冠幅面积的偏差在23.61%~28.84%之间,平均偏差为26.41%;其余三项数值的偏差较低可以满足基本的研究要求,最终决定选取树木数量和总冠幅面积两项参数进行系数修正。而手持激光雷达数据中,样地1和样地3树木分布结构相似,计算所得的偏差也相近,而样地2由于树木数量限制,计算结果偏差较大。本文主要采用样地1和3的计算结果,对平均树高、平均冠径和平均冠幅面积三项参数提出相应的修正系数。
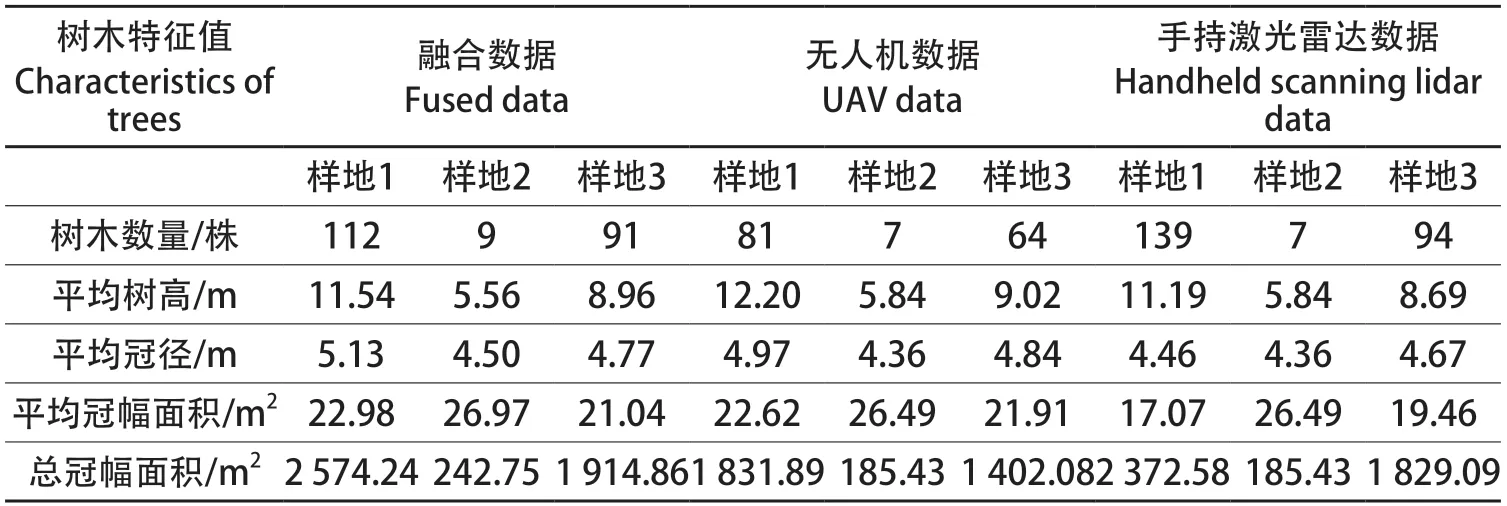
表2 样地单木树木特征值对比Tab.2 Comparison of tree characteristic values in sample
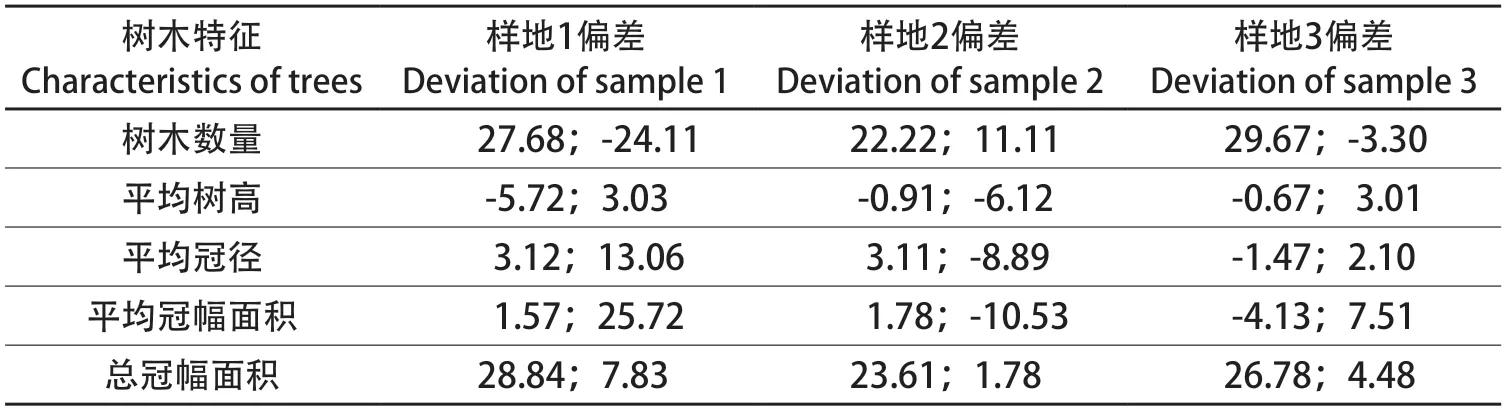
表3 样地单木偏差对比(单位:%)Tab.3 Comparison of deviation in sample
3.2 样地植被参数计算结果
根据表4和表5的计算结果可以看出,在乔灌草绿量的计算上,三个样地三维绿量均为乔木层绿量占比最高,灌木层绿量占比其次,草地层绿量占比最小。融合数据与手持激光雷达数据的计算结果更为接近,偏差最大为样地2中的草地层绿量,数值为16.87%,表明手持激光雷达数据能够较好地反映出植被的分层结构信息。平均三维绿量密度与乔灌草三者的绿量有关,无人机数据的偏差较大,最高达到了57.71%。在郁闭度、间隙率和叶面积指数三项参数上,融合数据和手持激光雷达数据的数值几乎相同,而与无人机数据的差值较大,均在10%以上,其中叶面积指数的偏差最大,在12.19%~64.71%之间。根据计算结果中各个参数的偏差大小差异,本次研究剔除了部分精度较高的参数,对无人机数据的乔木层绿量、灌木层绿量、平均三维绿量密度、郁闭度、间隙率和叶面积指数等多项参数提出修正系数。而对手持激光雷达数据中的乔木层绿量和平均三维绿量密度参数进行修正。
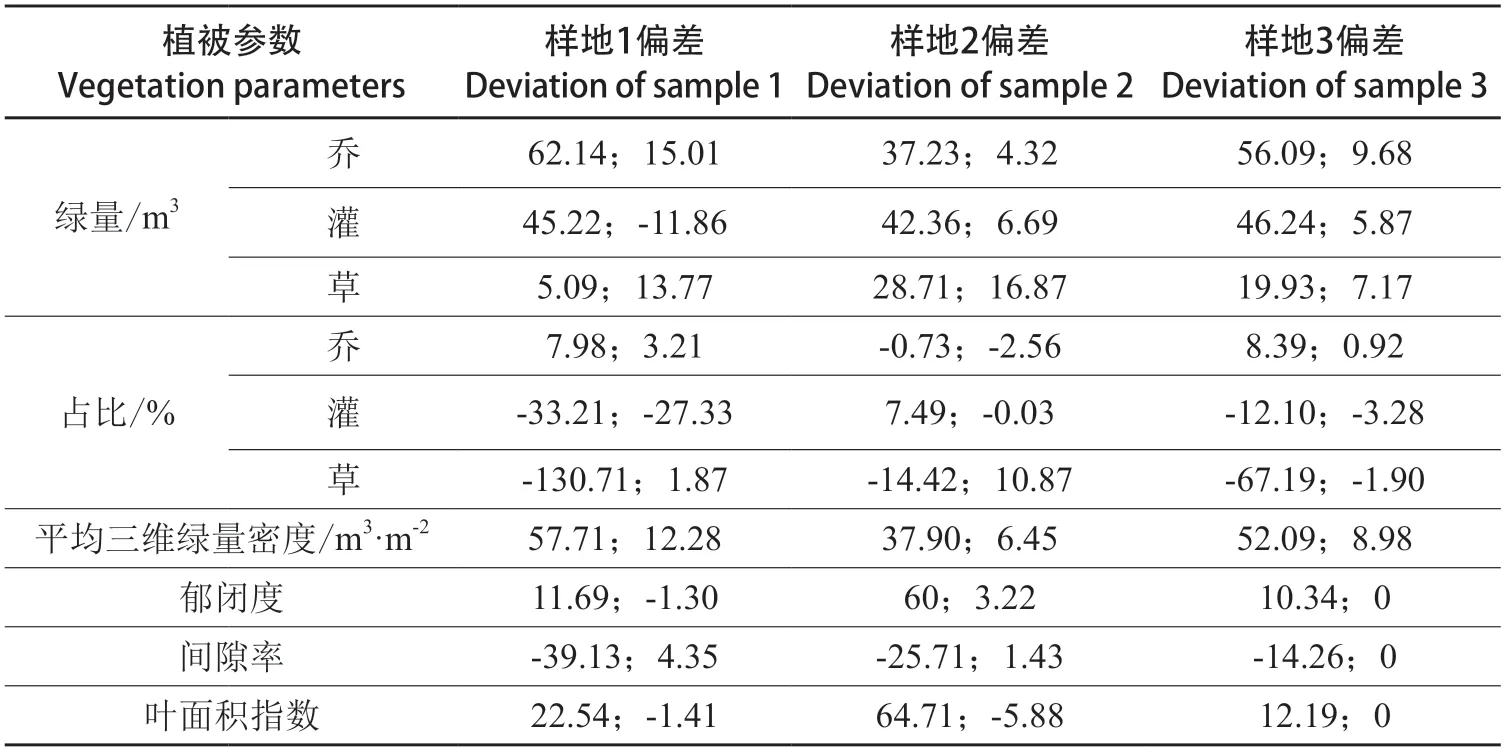
表5 样地偏差计算结果(单位:%)Tab.5 Calculation results of deviation amplitude in sample
3.3 修正系数计算结果
根据上述中单体树木和样地区域植被参数的分析结果,通过分析对比不同数据之间的精度差异,选取了不同参数进行修正系数计算。无人机数据中选取了树木数量、总冠幅面积、乔木层绿量、灌木层绿量等8项参数;手持激光雷达数据选取了平均树高、平均冠径、平均冠幅面积等5项参数,以融合数据的计算结果作为准确数据,根据偏差的计算公式,计算各个参数的修正系数。具体计算结果如表6所示。

表6 植被参数修正系数计算结果Tab.6 Calculation results of correction factor of vegetation parameters
4 结论与讨论
传统的样地调查方式在数据获取方面存在成本高、效率低、误差大等问题。而无人机遥感影像和手持激光雷达都能弥补这些缺陷,其具有成本低、精度高、计算方便等特点。激光雷达数据在估测树高、郁闭度、林分密度和林分生物量和积蓄量等方面均有应用[29]。可以利用无人机摄影测量技术和激光雷达技术快速获取某一区域内的单体树木信息和三维绿量信息,对碳中和、碳汇管理和碳交易提供准确的科学数据。城市绿化的生态环境效益不仅取决于绿化的覆盖面积,而且取决于绿化的空间结构[16]。就城市规划方面而言,利用无人机遥感影像数据和手持激光雷达数据可以快速获得研究区的三维植被信息,分析其现状结构。结合其他的软件模型,可以模拟不同植被结构条件下对于研究区的水热环境的影响,从而提出更加合理的城市绿地结构和生态廊道结构,以加强不同栖息地之间的联系,提升生物多样性。此外,林学、生态学、地理学、城乡规划学等不同学科可以取长补短,推动激光雷达技术的多学科交叉应用。
利用无人机遥感影像提取的激光雷达点云数据是自上而下扫描获得的,对于植被上部的获取更加完整,但通常缺少地面树干和下层低矮植被的信息。而手持激光雷达仪器则通过自下而上的方式获取点云数据的,能够获得较高质量的点云数据,但是也会受到采集方式和地形的影响,导致上层植被获取不够完整。整体上看,手持激光雷达数据精度高,无人机遥感影像数据可以作为其上层结构的补充,生成的融合数据弥补了二者的劣势,对于样地的识别更加精准,有助于后续树高、树冠直径、树冠面积等植被三维参数的提取。
本文扩充了三维视角下城市植被参数体系的研究,从精细化小尺度研究城市绿地的形态结构,试图改善传统植被参数的测量方式,无人机数据和手持激光雷达数据二者融合后的点云数能够较为完整地还原植被三维结构,提升了获取城市绿地植被参数的精度。由于缺少样地的实测数据,无法比较无人机、地面、融合点云三者与实测数据的偏差。同时,受限于采集仪器、软件算法、数据密度等,植被参数提取结果存在局限性。本文仅是对数据精度问题作出初步研究,今后需结合更多的样地数据,从不同植被分类结构,进一步完善相关系数。
注:本文图表均由作者绘制。
猜你喜欢
东北林业大学学报(2023年6期)2023-05-31
农业工程学报(2022年14期)2022-10-19
林业与生态科学(2022年3期)2022-07-30
丽水学院学报(2022年2期)2022-04-19
地理空间信息(2021年10期)2021-11-14
林业科技情报(2021年3期)2021-09-01
遥感信息(2019年1期)2019-03-22
森林工程(2018年5期)2018-05-14
中南林业调查规划(2017年1期)2017-12-19
现代园艺(2016年24期)2016-02-17