
基于物联网技术的公路架桥机过孔防倾覆控制
2024-03-11 01:25郭文奇
设备管理与维修 2024年2期
郭文奇
(中铁九局集团第七工程有限公司,辽宁沈阳 110041)
0 引言
悬挂配重方式过孔的架桥机采用更短主梁长度,可以有效降低设备生产成本和运输成本,目前已经被广泛使用。但是,这类架桥机过孔时,需要依靠施工人员主动控制来保证过孔的安全,如果经验不足操作不当,很容易引起倾覆事故。本文以SH-JQJ220-50A3 型公路架桥机为例,结合物联网技术,对50 mT 梁过孔过程中如何监控公路架桥机的过孔状态进行研究,以避免人为操作不当造成的事故。
1 物联网
物联网的体系架构可分为三层:感知层、传输层和应用层。
(1)感知层相当于人体的感知器官,由传感器、执行器与控制器及传感网络构成,是联系物理世界与虚拟世界的纽带。传感器是把物理信号转换成数字信号的仪器。本文利用电阻应变式称重传感器采集架桥机过孔过程中,提升小车所吊配重的重力;利用位移传感器采集小车、中支腿位移信息,根据位移信息计算各部件位置。
(2)传输层是对采集到的数字信号的进行传输,包括NFC 等近场通信技术和GPRS 等远距离传输技术。
(3)应用层是在终端将传输层传送过来的数字信号转换成数据,并利用终端设备对数据进行整理分析,把分析计算过程集成到终端软件中,让最终结果和数据一目了然。本文通过采集到的配重重力数据、小车及支腿位移数据和公路架桥机本身的长度、重量等相关数据,计算架桥机过孔时的安全系数,并根据不同的安全系数产生不同的反馈。
2 架桥机过孔防倾覆控制
2.1 架桥机组成
SH-JQJ220-50A3 型公路架桥机主要由主梁、后支腿、后托轮、中支腿、前支腿、横移轨道、提升小车组成(图1)。其中主梁为桁架式双主梁,全长84 m,总重为1400 kN,后支腿重60 kN,后托轮重80 kN,中支腿重170 kN;前支腿重120 kN,中支腿横移轨道重100 kN,前支腿横移轨道重50 kN,提升小车2 个,每个重200 kN。
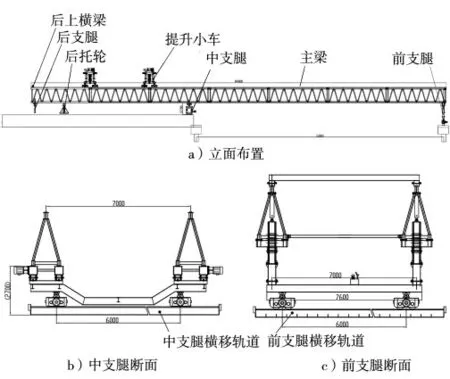
图1 SH-JQJ220-50A3 型公路架桥机结构
2.2 公路架桥机过孔程序
(1)将主梁调节至水平状态,将预制梁运至桥机尾部,做好过孔准备。
(2)启动前后支腿液压系统,靠千斤顶均匀顶起主梁至适当位置,在前后伸缩筒内穿入销轴。将横移轨道调整到适当位置,并调平垫实,使主梁落在后托轮和中支腿上。
(3)使桥机前进一定距离,前后小车同步后移,使小车距主梁后端与主梁悬臂端之和等于梁长。
(4)拉出前后伸缩筒内销轴,均匀收起前后支腿。
(5)将后提升小车与预制梁捆绑连接,形成整体,增加公路架桥机的抗倾覆能力。
(6)向前移动主梁至规定位置,同步向后移动小车,保持预制梁不动。
(7)前支腿到达下一墩柱支撑位置后,调节高度并插入销轴,使前支腿满足架梁要求,同时收起后支腿和反托架,完成过孔动作。
2.3 公路架桥机过孔倾覆风险
在架设50 mT 梁工况下,公路架桥机纵移过孔时,前支腿端处将于悬臂状态,以中支腿为支点,就会产生向前倾覆力矩。随着架桥机的纵向移动,悬臂端长度将会不断变长,倾覆力矩也随之不断变大。当架桥机前端的倾覆力矩大于后端抗倾覆力矩时,就会发生向前的倾覆事故。SH-JQJ220-50A3 型公路架桥机设计长度较短,无法通过自平衡过孔,需要靠配重增加抗倾覆能力,并通过随时调整提升小车位置保证抗倾覆安全系数符合要求。这就导致了此类型的公路架桥机过孔的安全性受人为因素影响大,如果操作人员对公路架桥机的整体不熟悉或者经验不足,导致未能配置足够的配重或者未能及时调整小车位置,就可能会导致倾覆事故的发生。
为了改变仅依靠操作人员经验及管理人员管控来防止风险的现状,通过引入物联网技术,增加设备过孔时的自动化控制,从而达到防止人为因素产生风险的目的。
2.4 架桥机过孔时抗倾覆系数计算
在架桥机过孔时,中支腿做为支点,前支腿到中支腿的距离为l0,前提升小车到中支腿距离为l1,后提升小车到中支腿距离为l2,配重吊在前提升小车上。前支腿和前支腿横移轨道产生的倾覆力矩为P1,主梁自身产生的倾覆力矩为P2。后支腿产生的抗倾覆力矩为P3,提升小车产生的抗倾覆力矩为Pt1、Pt2,主梁自身产生抗倾覆力矩为P4,配重产生的抗倾覆力矩为Pp。
架桥机双主梁对称且为均布载荷,可计算架桥机主梁上的均布载荷为:
各部分产生的力矩计算如下:
式(1)~式(8)中,G1为主梁重力,G2为前支腿重力,G3为提升小车重力,G4为后支腿重力,G5为前支腿横移轨道重力,Gp为配重重力,L 为主梁全长。
抗倾覆安全系数K 的计算:
由式(9)可以看出,随着架桥机过孔,前支腿悬臂长度l0的增加,抗倾覆安全系数不断减小,这时要通过调整2 个提升小车到支点的距离l1、l2来保证安全系数满足要求。
2.5 基于物联网技术的架桥机过孔防倾覆控制
将SH-JQJ220-50A3 型公路架桥机数据代入上述公式,安全系数K 取1.3,悬臂长度l0按T 梁长度50 m取值,提升小车放在架桥机尾部,提升小车宽2 m,l2最大取值为L-l0-1=33 m,l1最大取值L-l0-3=31 m,计算得出配重Gp最小为440.65 kN。按此配重进行过孔作业,如果未及时将l1调整到31 m,或支点位置选取不当、未及时停止主梁纵移导致悬臂长度超出50 m,都会造成安全系数小于1.3,而且提升小车、主梁纵移全靠人为调整,很难精准控制。例如,因为操作失误,悬臂长度l0达到52 m,抗倾覆安全系数K 就会降低至1.12,这就会大大增加倾覆的风险。
结合物联网技术,通过传感器采集信息,并通过GPRS 等远距离传输技术将信息传输到应用层,在应用层计算并显示安全系数,并根据安全系数控制架桥机动作。通过将电阻应变式称重传感器安装在提升小车定滑轮轴上采集配重重力Gp,并通过选用僵性较小的钢丝绳、效率高的滑轮组滚动轴承来提高传感器的精度。通过位移传感器采集提升小车、中支腿的位移,根据位移数据计算出悬臂长度l0、提升小车距中支腿距离l1、l2。在应用层将感知层采集到的Gp、l1、l2和已知的G1、G2、G3、G4、G5、L 数据代入安全系数计算公式,可实时计算并显示当前的安全系数:当安全系数小于1.3时,架桥机蜂鸣报警;当安全系数小于1.2 时,切断主梁前进回路;安全系数增加到1.3 后恢复正常。
可以将架桥机划分为过孔状态和正常状态,当架桥机调至过孔状态时候,防倾覆控制系统生效。这样可以避免防倾覆控制系统影响架桥机未过孔时的其他动作。
过孔防倾覆控制系统不能代替公路架桥机作业过程的其他安全措施。必须要确定横移轨道下支撑的强度,否则支撑不足或者枕木压碎都会导致失稳,发生倾覆事故;所有支腿必须铺垫枕木,避免与混凝土面直接接触。这样既可以通过枕木对公路架桥机进行调平,也可以增加公路架桥机支腿与混凝土面的接触面积,提高稳定性,避免对混凝土面的破坏,防止倾覆风险;公路架桥机就位后,需要空载横向移动,检查架桥机横向、纵向是否保持水平;过孔完成后,在固定前支腿时候,要注意前支腿的垂直度是否满足要求。前支腿垂直度不满足要求或者由于未要要求安装插销导致固定不牢度,在架梁时极易发生倾覆事故。
3 结束语
利用物联网技术,可以在架桥机过孔时即时显示安全系数,安全情况一目了然。当安全系数降低到阈值时,通过物联网系统提示预警并控制架桥机动作,可以有效避免过孔时人为操作失误、配重不足或计算错误等原因造成的架桥机倾覆事故。
猜你喜欢
中国公路(2021年17期)2021-11-22
中国特种设备安全(2021年1期)2021-07-21
中国科技纵横(2020年11期)2020-07-04
中国科技纵横(2020年5期)2020-06-29
液晶与显示(2020年4期)2020-05-11
小哥白尼(趣味科学)(2018年2期)2018-05-25
科学中国人(2016年18期)2016-12-23
工业设计(2016年4期)2016-05-04
工业设计(2016年6期)2016-04-17
液晶与显示(2015年3期)2015-05-10
