基于改进麻雀搜索算法模糊PID控制器设计
2024-03-01 07:07:16陈鲤文刘伟涛宁志翔朱婧
电工材料 2024年1期
陈鲤文, 刘伟涛, 宁志翔, 朱婧
(福建工程学院 泛在感知与多传感器智能融合研究所,福建福州 350118)
0 引言
无刷直流电机具有效率高、维护少、控制精确等优点,广泛应用于汽车、自动化、航空航天等工业控制领域。无刷直流电机主要采用电子换向,利用电子设备通过霍尔元件感应永磁极的位置,电子电路及时切换线圈中的电流方向,驱动电机。这种方法不仅消除了有刷电机的电刷与换向器之间的摩擦功耗等缺点,而且使其更容易控制。无刷直流电机的主要挑战是换向转矩波动。
近年来提出了多种控制电机转矩和转速的方法。采用大功率无刷直流电机的闭环控制对其转速进行检测,并采用PID调整参数,使其运行性能稳定在稳态,但它会在瞬态中有一些超调。由于无刷直流电机的非线性特性,传统的PID控制方法在达到稳态时会产生抖动。因此有必要设计一个适用的PID控制器[1]。本设计主要通过时变惯性权重改进麻雀搜索算法模糊PID控制器控制无刷直流电机,并采用Matlab/Simulink进行仿真验证。
1 控制器设计
1.1 模糊PID控制器
选用的模糊控制器为单变量二维模糊逻辑控制器。在Matlab模糊控制中定义误差e、误差变化率ec及控制量u的模糊集及其论域。确定模糊变量的隶属函数。采用模糊PID控制无刷直流电机的转速与转矩,在构建模糊PID控制器[2-3]时,输入为系统的误差e和误差变化率ec,通过模糊语言变量将输入变为模糊语言变量E和EC,让模糊控制结果作用在PID控制器上,用来实时调节PID的Kp、Ki、Kd参数。
1.2 时变惯性权重改进的麻雀搜索算法模糊PID控制器
麻雀搜索算法[4-5]是受麻雀觅食行为和反捕食行为启发而提出的一种新型群体智能优化算法。在麻雀觅食过程中,可将其整体种群分为发现者和追踪者,并且加入侦察预警机制,发现者在种群中的主要任务是寻找食物并为整个麻雀种群提供觅食区域和方向,而追随者主要是依赖发现者来获取食物。为了获得食物,麻雀可采用发现者和追随者两类行为策略进行觅食。侦察预警机制主要是从种群总体中选取一定比例个体来侦察预警,若此类麻雀发现危险则选择放弃食物,以保证种群安全。对于每个麻雀个体,其可能有三种状态改变:充当发现者、作为追随者、具备警戒机制。
种群中发现者,有较强的搜索能力,且具备全局导向能力,因此发现者需要具备更大的觅食搜索范围,由此抽象其位置更新表达式为:
种群中除去发现者,剩余麻雀均为追随者。追随者的位置更新表达式为:
当最优位置麻雀在局部最优解处搜索时,随着不断地迭代,剩余的麻雀也会沿着最优麻雀的方向移动,从而出现局部最优的问题。为了解决这一问题,引入一个非线性递减权在Piecewise混沌映射改进的麻雀搜索算法中,主要是其可以在早期促进全局最优的搜索,在后期进行局部最优搜索。这可以有效地防止种群陷入局部最优。时变惯性权重如公式(3)所示。
在Piecewise混沌映射改进的麻雀搜索算法中加入时变惯性权重之后,最终更新表达式为:
基于改进麻雀搜索算法模糊PID控制器如图1所示。

图1 改进麻雀搜索算法模糊PID控制器
2 Matlab仿真与实验结果
2.1 无刷直流电机的数学建模[6]
Simulink模型中无刷直流电机的驱动方式采用两相导通方式,定子三相绕组采用星形连接,无中性线,转子磁极为环形内转子磁极。假设无刷直流电机工作在理想状态下,忽略电机的摩擦损耗和杂散损耗,根据能量守恒定律,输出的机械能和吸收的电能相等。电枢绕组为三相对称结构,各绕组的互感和电阻相同。基于直流无刷电机理想化模型其电压方程为:
式中:uA,uB,uC为定子电压;eA,eB,eC为定子反电动势;iA,iB,iC为定子电流;R为电子绕组相电阻,且RA=RB=RC=R;L为定子电感,且LA=LB=LC=L;M为定子绕组间互感,且LAB=LAC=LBA=LBC=LCA=LCB=M;t为时间。假设电动机转速为ω,则电磁转矩的计算公式为:
式中:Te为BLDC的电磁转矩;ω为BLDC的角速度。
机械运动方程为:
式中:TL为负载转矩;J为电机转动惯量;B为阻尼系数。
电机控制主要研究的是无刷直流电机的输出转速与转矩。模型主要是时变惯性权重改进麻雀搜索算法模糊PID控制器的输出电流参考值,比较作差后输入电流滞环控制器,经过PWM控制三相六臂全桥驱动器控制电机输出。控制直流无刷电动机运动仿真如图2所示。

图2 直流无刷电机控制仿真
2.2 实验结果分析
通过时变惯性权重改进的麻雀搜索算法优化模糊PID控制器对无刷直流电机进行仿真,初始条件设为960 r/min,在1 s时进行速度切换,速度变为200 r/min;在0.5 s时加入小负载,在1 s时撤去负载并且改变电机的转速,总仿真时长设置为2 s。图3和图4分别为时变惯性权重改进麻雀搜索算法模糊PID控制器控制下的无刷直流电机转速与转矩输出仿真图。从图3可以看出,电机在启动后经过0.45 s达到预定的速度,并且0.5 s时能快速响应负载波动变化。在1 s时电机开始切换速度且撤去负载,当负载与速度切换同时发生时,无刷直流电机既能响应负载变化,又能同时进行速度切换。经过0.25 s,电机速度趋于平稳输出。从图4可以看出,无刷直流电机在上升到预定速度过程中转矩波动较大,但电机稳定运行时转矩保持平稳,在无刷直流电机转速切换时引起轻微波动,但此波动在规定范围内。经过0.36 s后电机转矩达到平稳状态。仿真结果平稳且符合实际要求。

图3 时变惯性权重改进麻雀搜索算法模糊PID控制器控制下的直流无刷电机转速
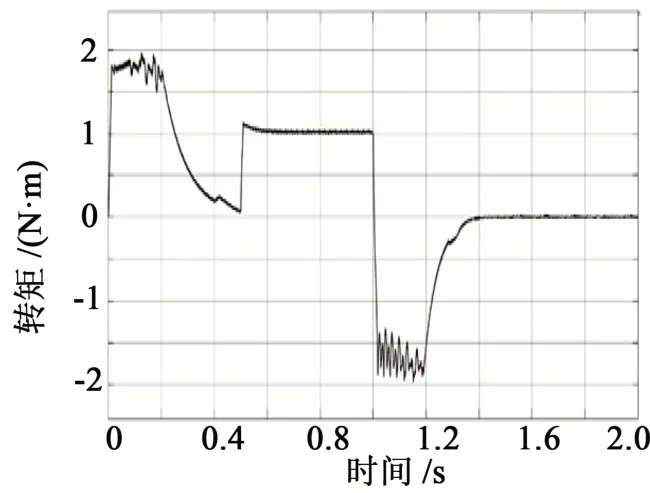
图4 时变惯性权重改进麻雀搜索算法模糊PID控制器控制下的直流无刷电机转矩
为进一步验证设计的控制器的有效性,通过Matlab生成了三种PID的控制曲线(如图5所示)。从PID控制曲线可以看出当无刷直流电机上升到预定速度时会出现超调导致电机的速度不稳定,并且无刷直流电机转速产生较大的波动。在PID的基础上使用模糊逻辑模仿人的行为去控制无刷直流电机的转速,由曲线可以看出,当无刷直流电机达到预定速度时,无刷直流电机能够平稳运行,但在达到预定速度时间上慢于PID控制控制器。在模糊PID的基础上加入时变惯性权重改进麻雀搜索算法,从图中曲线可以看出电机能够很快到达预定的速度且没有超调,相对于模糊PID控制器在达到预定速度时在时间上减少了50%且快于PID控制器。由此进一步验证了设计的时变线性权重改进的麻雀搜索算法优化模糊PID控制器是可靠的且符合要求。

图5 模糊控制器PID直流无刷电机转矩
3 结论
建立了无刷直流电机转速转矩控制仿真模型,通过Matlab/Simulink建立控制器将其加载到无刷直流电机上进行模拟控制,通过仿真实验与三种控制器的转速对比验证了提出的改进的麻雀搜索算法优化模糊PID控制器的有效性。
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:42
法律方法(2018年2期)2018-07-13 03:21:42
电子制作(2017年1期)2017-05-17 03:54:12
魅力中国(2017年6期)2017-05-13 12:56:17
中学生数理化·八年级物理人教版(2017年11期)2017-02-15 02:12:21
电测与仪表(2015年15期)2015-04-12 00:43:48
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
河北科技大学学报(2015年5期)2015-03-11 16:16:37
电机与控制应用(2015年1期)2015-03-01 03:49:10