
可穿戴式下肢外骨骼康复机器人运动学分析
2024-02-28 05:52权紫晴
科技创新与生产力 2024年1期
赵 旭,权紫晴
(安徽理工大学机械工程学院,安徽 淮南 232000)
近几十年来,下肢外骨骼机器人得到了越来越多的关注和发展。可用于医院的康复训练、日常生活中的辅助行走,以及在非结构化地形森林和灾区搬运重物[1]。
绳驱动并联机器人具有工作空间大、运动速度快等特点,具有较强的使用价值。现有的绳驱动康复机器人在训练初期会由于患者肌无力问题影响康复训练效果[2]。可穿戴式下肢外骨骼机器人从生物力学角度进行交互控制设计,充分考虑到运动中存在的生物力学问题,达到人体下肢与外骨骼机器人的高度耦合,根据智能化操控对患者运动能力和行走步态进行康复训练,提高患者康复训练的质量和效率。国内外大量对外骨骼康复机器人的结构优化、仿真分析、运动轨迹规划等的研究成果,已成功应用于运动功能障碍康复领域[3]。外骨骼康复机器人被广泛应用于下肢运动障碍患者的辅助行走,可大大增强肢体运动功能受损患者的康复效果。
传统刚性下肢外骨骼康复机器人对关节处的自由度会产生一定的约束,从而导致康复过程未能达到期待的效果,以及很有可能使患者再次受伤。为了避免此类问题,本文设计出绳驱动的可穿戴式下肢外骨骼康复机器人。
1 运动学分析
可穿戴式下肢外骨骼康复机器人由两个机械腿组成,由髋关节连接装置连接。整体结构包括可穿戴背包、大腿调节机构、小腿调节机构、踝关节、足部模块和绳索驱动装置。在髋关节和膝关节处设有驱动装置,将绳索驱动装置置于背部可穿戴背包的下方。所述绳索一端与所述电机连接,另一端与所述下肢连接。通过中间关节处的滑轮,由绳索遥控带动下肢关节,带动大腿和小腿绕关节轴旋转。可穿戴式下肢外骨骼康复机器人总体设计结构见图1。
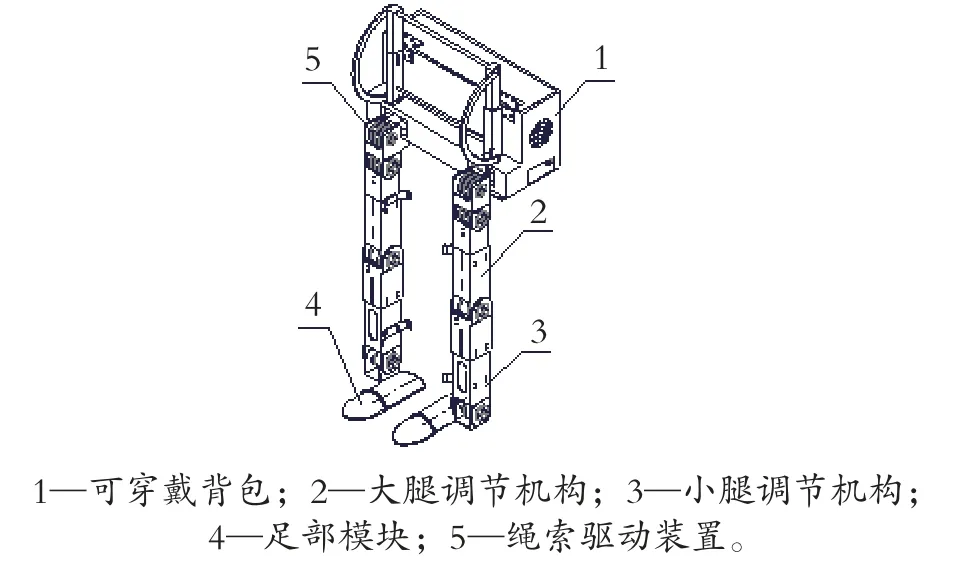
图1 可穿戴式下肢外骨骼康复机器人总体设计结构
通过查阅GB/T 10000-1988《中国成年人人体尺寸》相关人体下肢尺寸参数表,得到各部件的尺寸范围,大腿尺寸可调范围为360~550 mm。小腿尺寸可调范围为280~450 mm,臀部尺寸可调范围为270~380 mm。使得下肢结构尺寸可以调节。
查询文献可知,只需要多一根绳索的自由度,就可以控制下肢关节的运动。本文主要采用n+1 型绳轮驱动,这样可以减少驱动电机的数量,降低可穿戴式下肢外骨骼康复机器人的重量。
外骨骼康复机器人的运动学分析主要是建立参考坐标系和下肢各关节处坐标系,将下肢各部分简化为执行杆,建立相邻关节处坐标系间的变换矩阵,求解了外骨骼康复机器人下肢步态运动时关节角度与末端执行杆轨迹的关系[4-5]。本文设计的可穿戴式下肢外骨骼康复机器人是一种复杂的连杆机构,两侧结构完全对称[5-6]。因此,本文以一侧为研究对象。根据三维模型得到D-H 参数表,见表1。依据D-H 法建立模型坐标系,描述各连杆的D-H坐标系见图2。
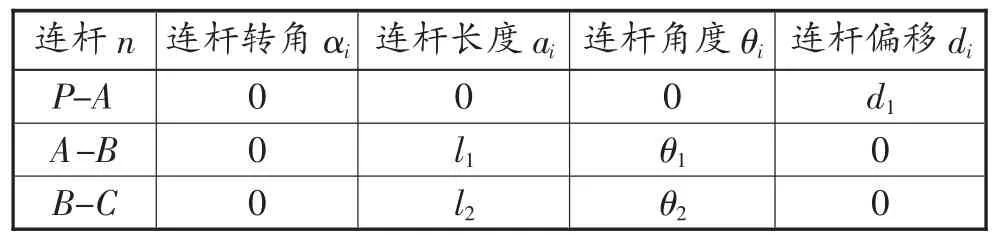
表1 D-H 参数表
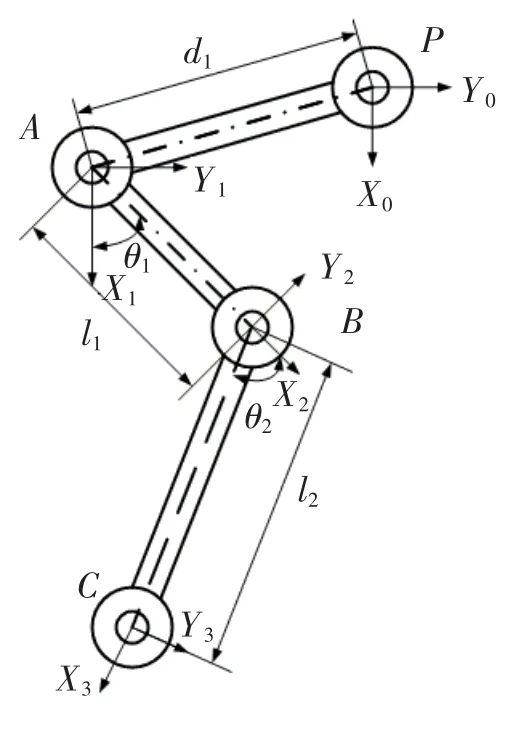
图2 D-H 坐标系
利用MATLAB 中Robotic Toolbox 中的Link、Seriallink 函数编写运动学函数,利用MATLAB 工具箱构建下肢外骨骼连杆模型,可清晰地看出下肢位姿变化,其连杆模型见图3。
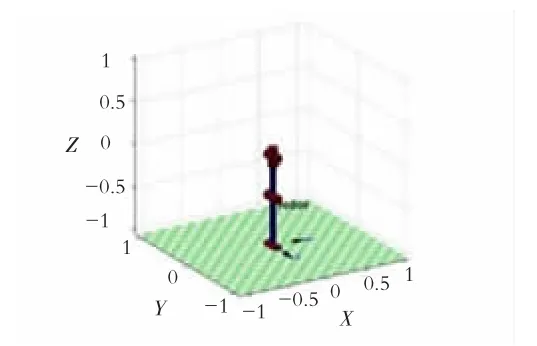
图3 连杆模型
由D-H 坐标系参数,得到各连杆的变换矩阵分别为
进而得到的运动学方程为
式中:cij代表cos(θi+θj);sij代表sin(θi+θj)。
为了验证解的正确性,选取患者下肢和腿外伸的位姿参数为θ1=θ2=0°,代入上述公式,得到连杆末端部的位姿矩阵为
通过对比可以发现,两者结果一致,同时也验证了所推导出的运动学方程与可穿戴式下肢外骨骼康复机器人是一致的。
2 步态规划与轨迹规划
可穿戴式下肢外骨骼康复机器人步态运动可以分为3 个阶段,分别为起步阶段、中步阶段和止步阶段。在进行步态规划之前,为使步态稳定,进行一定的约束:行走过程中,人体上肢始终保持与地面垂直,外骨骼重心保持在同一水平面内,以及步行过程中不会出现打滑等过程。
利用五次多项式插值法进行步态规划,则外骨骼康复机器人步态规划方程为
2.1 起步阶段
起步阶段主要是对可穿戴式下肢外骨骼康复机器人的摆动腿进行规划,假设踝关节达到最高位置Hs,步长Ss,时间Ts。
通过起步步态特征,给出踝关节的约束方程为
其中,最高位置Hs=0.2 m,步长Ss=0.6 m,起始时间Ts=1 s。
将系数代入,可得踝关节的步态规划方程为
同理,可得髋关节的步态规划方程为
2.2 中步阶段
中步阶段,摆动腿的起始点坐标为((kSs-Ss/2),0),时间为t=kTz;摆腿摆动到最高位置时,最高点坐标为(kSs,H),时间为t=kTz+Ts/2;终止点坐标为((kSs+Ss/2),0),时间为t=kTz+Ts。
通过中步阶段步态特征,给出踝关节的约束方程为
其中,最高位置H=0.2 m,步长Ss=0.6 m,起始时间Ts=2 s。
将系数代入,可得踝关节的步态规划方程为
同理,可得髋关节的步态规划方程为
2.3 仿真
将髋关节、膝关节的起止角输入到Robotic Toolbox,得到腿部模型起止的位姿状态,见图4。
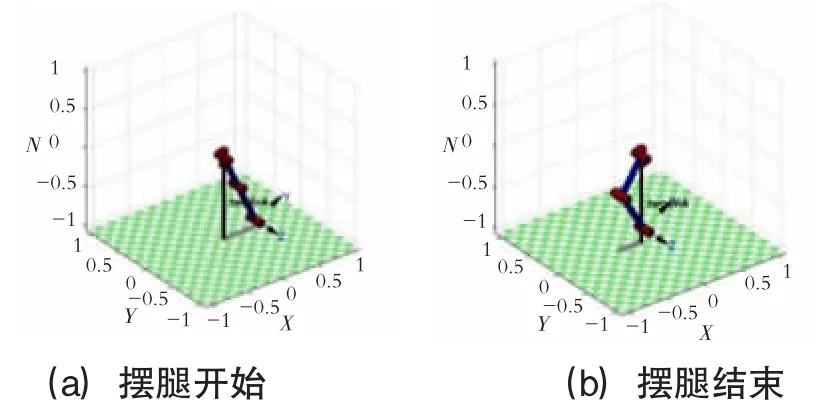
图4 腿部模型起止的位姿状态
通过腿部模型起止的位姿状态,利用MATLAB中的Robotic Toolbox 进行轨迹规划,得到轨迹规划的位姿状态,见图5。
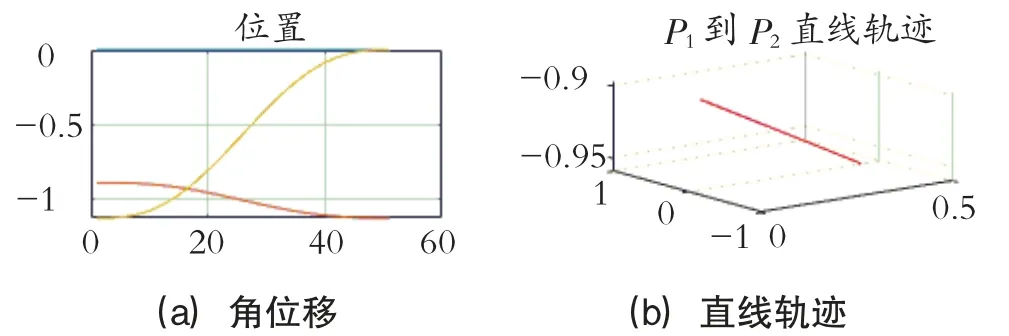
图5 轨迹规划的位姿状态
由此可见,可穿戴式下肢外骨骼康复机器人的角位移曲线具有良好的特性,变化光滑,符合人体的行走特性,验证了所设计步态运动方程的准确性和合理性。
3 运动学仿真
通过ADAMS 软件对其进行运动学仿真,可以得出机构运动过程中的干涉情况,从而可以对所不适应尺寸进行修改,使其与实际物理样机运动相似。并利用Postprocessor 模块得到各关节相应参数的变化曲线,各关节位移曲线见图6。由图6 可知,各关节位移变化圆滑,运动平缓、稳定。
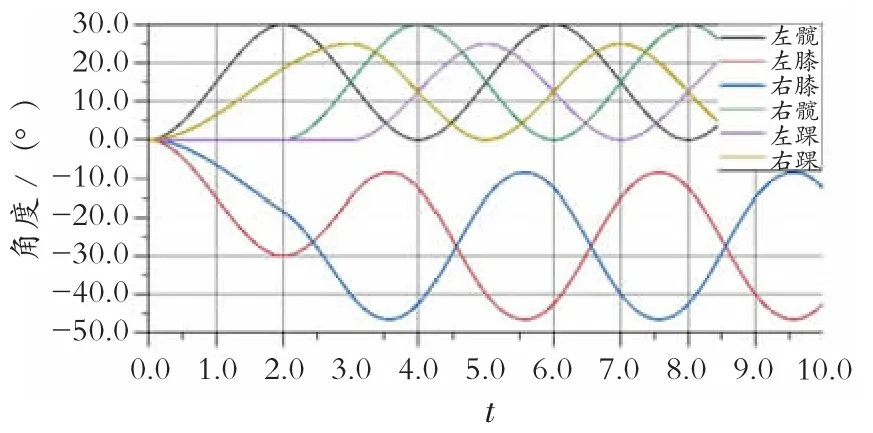
图6 各关节位移曲线
4 结论
本文设计的可穿戴式下肢外骨骼康复机器人可以减轻患者的负重,保护患者二次受伤。本文对其进行了运动学数学建模,得到了步态规划与轨迹规划的步态运动方程,证明了理论研究的有效性。通过对ADAMS 软件对其进行运动学仿真,可知其各关节角位移变化平滑、稳定,表明了所设计康复机器人具有良好的效果。
猜你喜欢
科学大众(2024年5期)2024-03-06
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
湖北工业大学学报(2016年5期)2016-02-27
发明与创新(2015年33期)2015-02-27
发明与创新(2015年25期)2015-02-27
