应用于运动平台光电跟瞄系统的惯性参考单元研究综述
2024-02-28 10:57李醒飞何梦洁拓卫晓王天宇韩佳欣王信用
光学精密工程 2024年3期
李醒飞, 何梦洁, 拓卫晓*, 王天宇, 韩佳欣, 王信用
(1. 天津大学 精密测试技术及仪器国家重点实验室,天津 300072;2. 深海技术科学太湖实验室,江苏 无锡 214000)
1 引 言
在天文观测[1]、激光通信[2]和量子通信[3]等领域,目标的变化和任务拓展对光电跟瞄系统提出了快速机动的要求,从地基平台到车载、船载、机载、星载等运动平台拓展是光电跟瞄系统的重要发展趋势。国家“十四五规划”中明确提出加速发展的量子通信、星际探测、探月工程等空天科技前沿领域均需要运动平台光电跟瞄系统的支撑。相比地基式光电跟瞄系统,运动平台的高机动性会引入极难克服的振动干扰,造成系统视轴晃动甚至抖动,影响跟瞄精度[4]。不同载体的振动来源及频谱特征也不尽相同。车载振动的主要来源为路面趋势变化、履带拍打等,根据某军用车实测数据,振动频率为2~10 Hz[5]。船载振动的主要来源为轴系不平衡力和螺旋桨叶片扰动、风浪等,根据国军标船舰振动试验数据,振动的频率范围为1~100 Hz[6]。机载振动的主要来源为发动机噪声、气流扰动和螺旋桨影响等,法国SA-315 直升机振动频率<106.6 Hz,我国直-8直升机的振动频率为20.7~82.4 Hz[6]。星载振的主要来源为空间环境振动内部机械运作,OLYMPUS 卫星的振动频率为1~200 Hz,ETSVI 卫星的振动频率为0.39~250 Hz[7]。如何抑制载体振动造成的视轴抖动,是光电跟瞄领域需要解决的核心问题。
载体基座角扰动的隔离可以通过被动隔离或主动稳定两种方式实现。被动隔离采用物理隔离法,即在敏感载荷与载体之间安装适当强度的弹簧,依靠弹簧阻尼消耗振动能量。被动隔离技术最典型的应用是空间观测望远镜,如詹姆斯韦布太空望远镜的塔式隔振结构和斯皮策太空望远镜的APSI 隔振器。被动隔离可有效隔离载体的高频低幅振动,但会增加系统设计的复杂性,且隔离后的扰动仍可能影响系统视轴的稳定精度[8]。另一种基座角扰动的隔离方法是主动稳定,通过稳定跟踪机架、稳定反射镜和引入惯性基准光3 种方式可以实现光轴抖动的抑制[9]。稳定跟踪机架是一种早期的惯性稳定方式,通过安装于机架上的惯性传感器将测量值反馈或前馈至控制器,实现视轴的稳定。但由于机架的摩擦、转动惯量、谐振频率以及传感器性能等因素的限制,该方案对高频扰动的抑制能力有限,一般仅能实现低频扰动的抑制,稳定精度只能达到亚毫弧度量级[8-9]。反射镜稳定技术通过调整光路中快速反射镜(Fast Steering Mirror,FSM)的姿态改变光路的方向,实现视轴的稳定。该方案的控制对象为反射镜本身,有效减小了被控对象的体积和质量,可以获得较高的抑制带宽。但视轴转动角与反射镜框架转动角有2∶1 的比例关系,因此,无法通过直接使陀螺信号趋零的方式实现视轴稳定[9-10]。目前,最常用的视轴主动稳定方法是利用IRU 提供惯性基准光,穿过库德光路后注入主望远镜中,辅助FSM 实现视轴的自准稳定。
根据惯性传感器的安装位置的不同,可将IRU 分为平台式和捷联式。平台式IRU 的惯性传感器直接敏感基准光源所受角扰动,在不需要匹配任何参数的情况下,将所有被控对象均置于闭环控制系统中,实现扰动的有效抑制。捷联式IRU 的惯性传感器安装在基座上,测量并输出基座角扰动,该值乘以匹配的增益前馈到主光路系统的FSM 上,通过旋转FSM 消除载体扰动。Draper 实验室通过实验证实,捷联式IRU 对传感器的相位和增益等参数较为敏感,易受运动耦合误差的影响,在相同惯性传感器水平下,对载体扰动的抑制能力要比平台式IRU 低一个数量级[11]。
根据结构形式的不同,平台式IRU 又可分为框架式和采用柔性支承的类快反镜式结构。框架式利用一个或多个万向架构成单轴或多轴转台。类快反镜式为二自由度旋转结构,主要包括基座、弹性支承、电机和平台等四部分[5]。两种方式相比,框架式IRU 具有较大的工作范围,但受限于转动惯量大和轴系摩擦等问题,扰动抑制带宽较低。而类快反镜式IRU 具有无摩擦、阻尼小等优势,主动抑制带宽、稳定精度更高。高精度IRU 的未来发展趋势为采用柔性支撑结构而非框架式结构、实现平台式而非捷联式的惯性稳定。
本文将对基于柔性支承的平台式IRU 的原理、特点及应用情况展开讨论,综述针对此类IRU 的相关研究和应用现状,并针对国内外研发产品技术指标的差距,剖析国内研究所存在的问题,探讨技术未来的发展趋势。
2 IRU 系统工作原理与数学模型
2.1 系统工作原理
IRU 是一个可实现两个方向小角度偏转的惯性稳定平台,其上安装有低噪声、宽频带的惯性角速度传感器。在复合轴稳定系统中,IRU 的主要作用是利用惯性传感器提供的信号反馈控制平台,提供一束不受基座角扰动影响的惯性参考光束,同时,它还能够调整光束的空间位置,实现初始位置校准。系统原理及控制框图如图1所示。
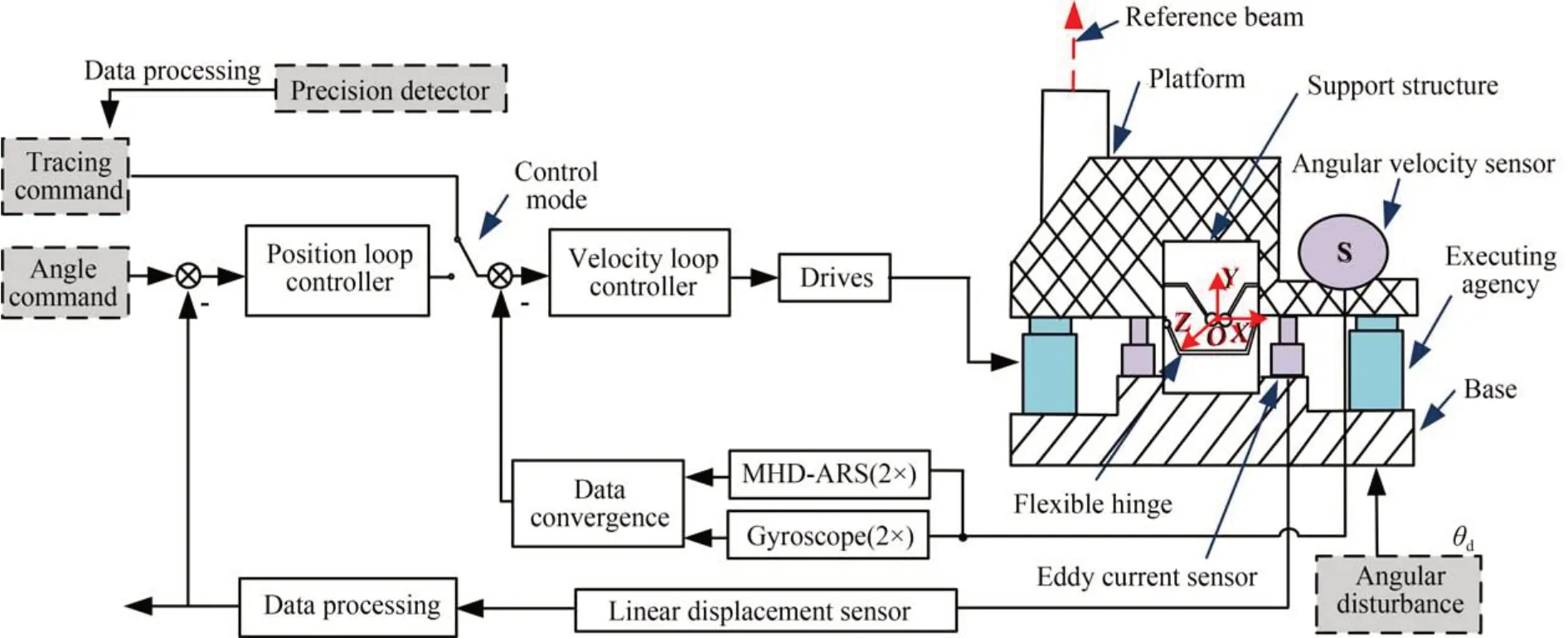
图1 IRU 系统原理及控制框图Fig.1 Mechanical structure and functional schematic of the IRU′s control system architecture
当存在基座角扰动θd时,安装在平台上的磁流体动力学角速度传感器(Magnetohydrodynamics Angular Rate Sensor,MHD - ARS)与低频陀螺仪,实时测量被控对象的振动状态,两种惯性传感器的输出信号,经数据融合后产生误差电压,作为反馈量输入至速度环控制器,控制驱动器通过执行机构产生反作用力矩驱动平台反方向转动,衰减甚至归零惯性传感器的输出,实现平台的惯性稳定。此时,由平台上安装的激光源发射的激光束被稳定于惯性空间,为光电跟瞄系统提供视轴参考。抑制基座角扰动后,精探测器上目标的晃动便完全是由目标运动造成的,据此精探测器准确获取目标脱靶量后,主动给系统一个进给信号,实现目标的精跟踪。
在IRU 系统的基座和平台间还装有测量基座和平台间的相对角位置的电涡流线位移传感器,测得的偏差信号经位置环控制器,输出控制力矩使平台指向标称位置,实现系统光路的初始对准。此外,当系统处于惯性稳定/惯性稳定跟踪模式时,电涡流线位移传感器测得的相对角位置信息输出给IRU 载体,防止系统转动角度超出允许的角行程范围。
2.2 系统数学模型
IRU 系统两个工作轴之间具有较低耦合度,可以简化为两个完全相同的单轴模型,本节以单轴为例进行分析。系统等效模型如图2~图3 所示,相关物理参数定义见表1。
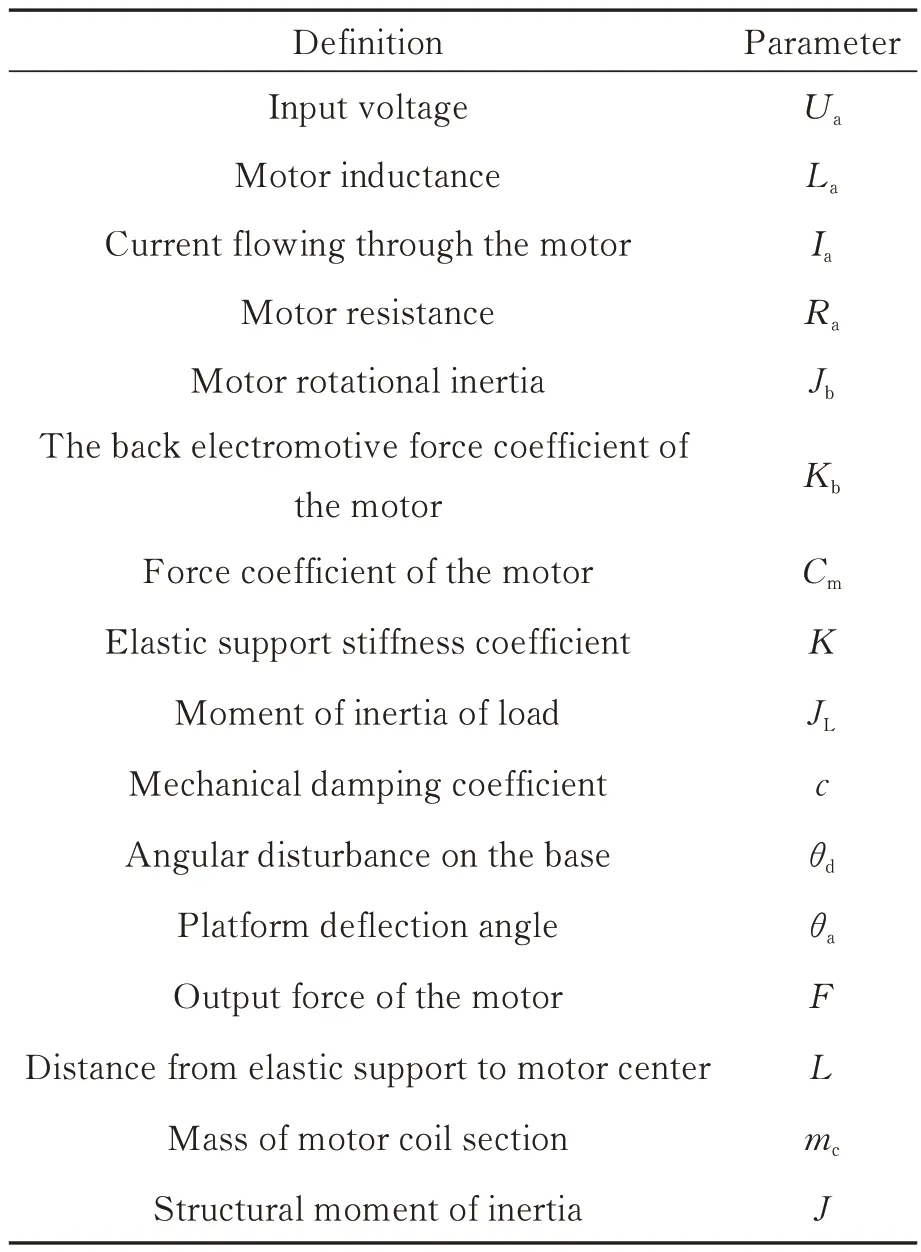
表1 图中各变量的物理定义Tab.1 Defination of variables in Fig.2 and Fig.3
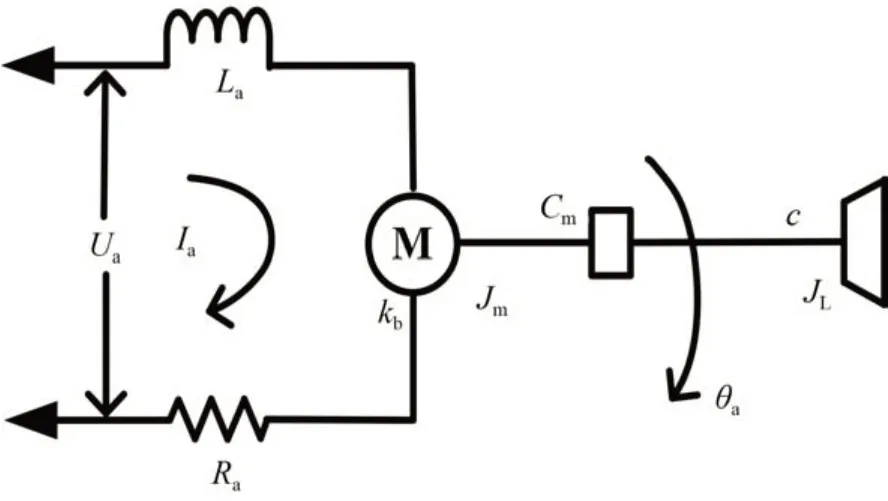
图2 IRU 系统的电学模型Fig.2 Electrical model of IRU system
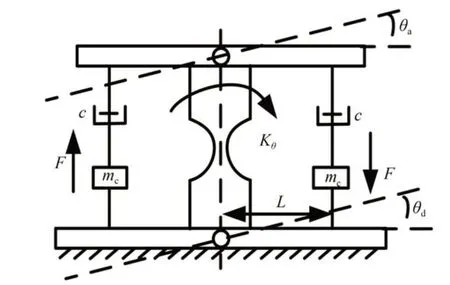
图3 IRU 系统的质量-刚度-阻尼模型Fig.3 Mechanical model of IRU system
根据图2,可以建立系统电压平衡方程:
根据图3,可以建立系统力矩平衡方程:
联立式(1)和式(2),并进行拉式变化,可以得到平台转动角度θa与输入电压Ua和基座扰动θd间的关系式如下:
当基座角扰动θd=0 时,可得系统被控对象特性:
当Ua=0 时,系统的扰动传递特性为:
IRU 系统的扰动抑制能力由主动抑制能力(控制回路特性)与被动抑制能力(扰动传递特性)共同决定,如图4 所示。IRU 系统稳定的目的便是在θd≠0 条件下,通过结构优化和控制回路保证θa尽量接近于零。
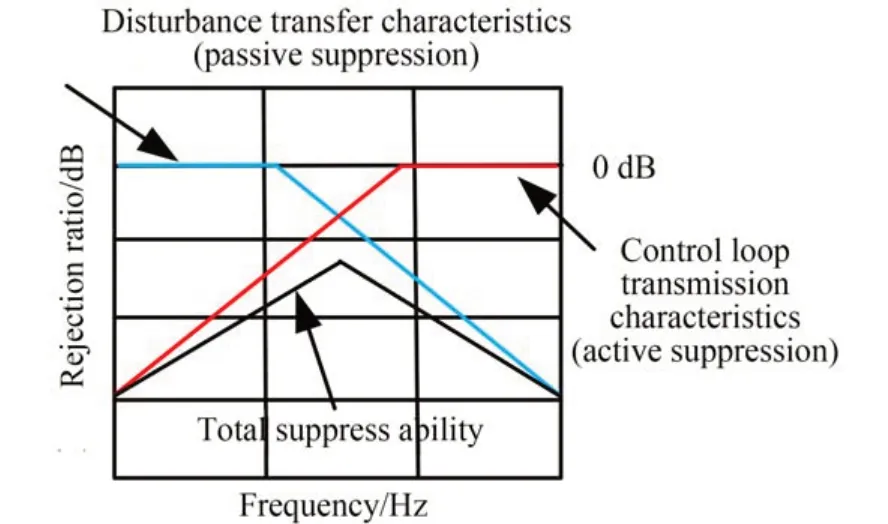
图4 IRU 系统扰动抑制特性Fig.4 Disturbance suppression characteristics of IRU system
3 IRU 国内外研究进展
3.1 IRU 国外研究进展
20 世纪90 年代以来,美国NASA、美国应用科技协会(ATA,现已被BLUEHALO 公司收购)、麻省理工学院(MIT)、波音和日本三菱电机等机构开始对用于视轴稳定系统中的IRU 进行研究。
1994 年,在美国国防研究计划局(ARPA)和BMDO 公司资助下,MIT 的Draper 实验室开发完成了一种被称作惯性伪星参考单元(Inertial Pseudo Star Reference Unit,IPSRU)的IRU 装置[12],如图5(a)所示。IPSRU 采用ADS 8031 型角位移传感器(Angular Displacement Sensor,ADS)与MOD IIE/S 型动力调谐陀螺仪组合测量,并使用四个对称排布的音圈电机以推挽的方式提供反馈补偿力矩。在交付给美国空军研究实验室进行高空气球试验前,Draper 实验室对IPSRU 的性能进行了实验测试。测试结果如图5(b)所示,表明IPSRU 能够将0.4~312 Hz 频带内417 rad RMS 的基座扰动抑制到37 rad RMS,1~100 Hz 频带内扰动抑制比大于55 dB,1 Hz 处扰动抑制比为93 dB。
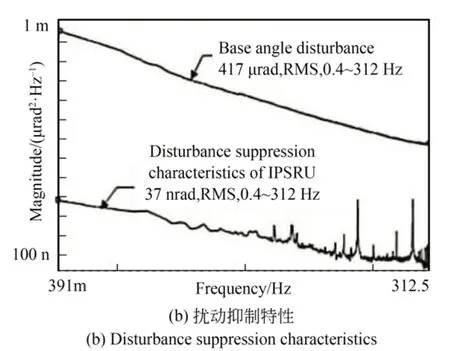
图5 Draper 实验室研制的IPSRU 及系统扰动抑制特性Fig.5 IPSRU developed by Draper Lab and it′s system disturbance suppression characteristics
2000 年,BLUEHALO 公司首次将MHD 角速度传感器引入IRU 的设计中,并使用MEMS陀螺仪对所用ARS-12 的低频误差进行补偿,成功研制了如图6 所示的基于MHD 角速度传感器的IRU(简称MIRU)[13]。与Draper 实验室的IPSRU 对比实验结果表明,MIRU 在全频带(0.1~1 000 Hz)内的扰动抑制残差为0.844 μrad,对基座扰动的抑制能力要比IPSRU 低1 个数量级。
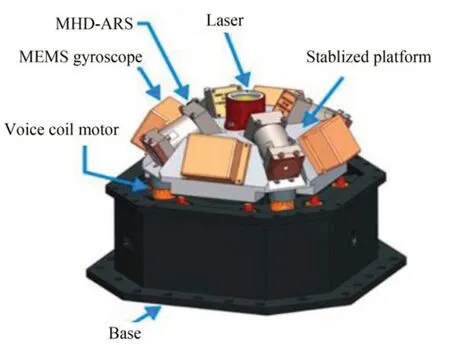
图6 BLUEHALO 公司研制的MIRUFig.6 MIRU developed by BLUEHALO
2001 年,美国NASA 喷气推进实验室JPL 使用Allied Signal 公司的QA-3000 线加速度计测得角加速度,再通过二次积分得到角位移,辅助信标光进行深空光通信中视轴的稳定控制,以期获得亚微弧度量级的跟瞄精度以及几百赫兹的抑制带宽[14]。使用图7 所示的实验装置进行系统测试,结果表明,该方案对幅值90 μrad(频率为35,45 Hz)正弦信号的跟踪误差并未达到亚微弧度设计指标。
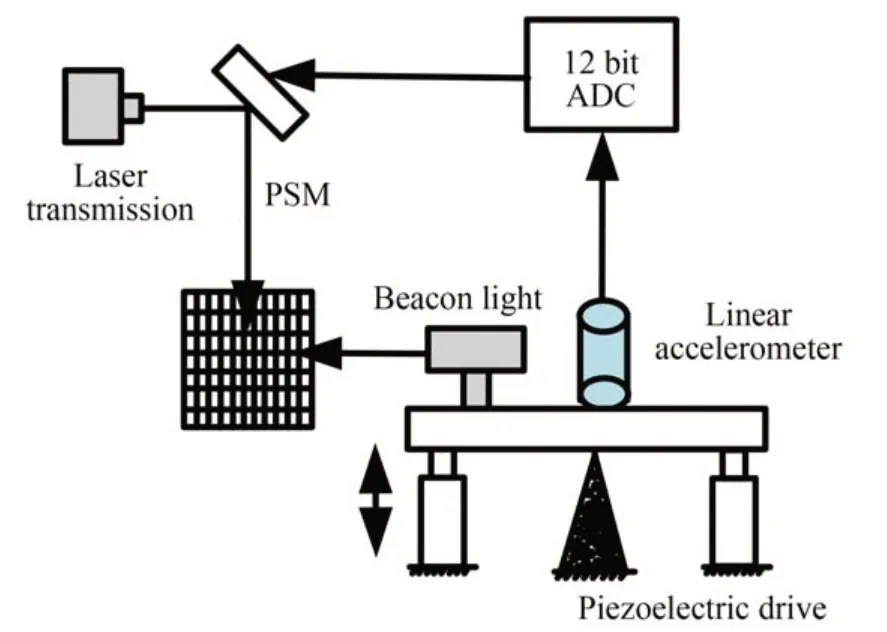
图7 线加速度计辅助信标光实现视轴稳定系统实验装置Fig.7 Linear accelerometer assisted line-of-sight stabilization system
2002 年,美国Draper 实验室提出高性能惯性伪星参考装置(High Performance Inertial Pseudo Star Reference Unit,HP-IPSRU),设想使用BLUEHALO 公司的ARS-12G 型传感器替代IPSRU 中的ADS 8031,再与0.1~100 Hz 频段内噪声≤2 nrad 的第三代低噪声陀螺仪LNTGG 融合,并通过结构优化将系统基座角扰动被动隔离度提高3~4 倍[15],以期满足空间激光通信系统对0.1~300 Hz 频带内5 nrad RMS 的光束指向精度要求。但该系统后续实验测试数据未见于公开发表的文献中。
同年,美国波音SVS 公司研制了原理与IPSRU 和MIRU 类似的两轴惯性稳定测量系统(Stabilized Inertial Measurement System,SIMS)[16],如图8(a)所示。SIMS 利用商用速率陀螺与BLUEHALO 公司的ARS-12 型传感器数据融合,实现了0~1 000 Hz 频段内角扰动的高精度测量,最终实现了1~500 Hz 内1 μrad 的稳定精度。SIMS 系统的扰动抑制能力与扰动传递带宽(被动抑制特性)负相关,与扰动控制带宽(主动抑制特性)正相关,如图8(b)与8(c)所示。
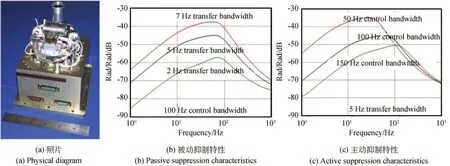
图8 波音SVS 公司研制的SIMSFig.8 SIMS developed by Boeing SVS
为了进一步提升IRU 的稳定性能,BLUEHALO 公司从2007 年开始从硬件角度对研制的MIRU 进行了优化,采用基于FPGA 的控制板卡,研发了新一代光学惯性参考单元(Optical Inertial Reference Units,OIRU)[17],如图9 所示。BLUEHALO 公司于2021 年发布的OIRU-500在工作带宽内的抖动抑制性能达到了500 nrad[18]。
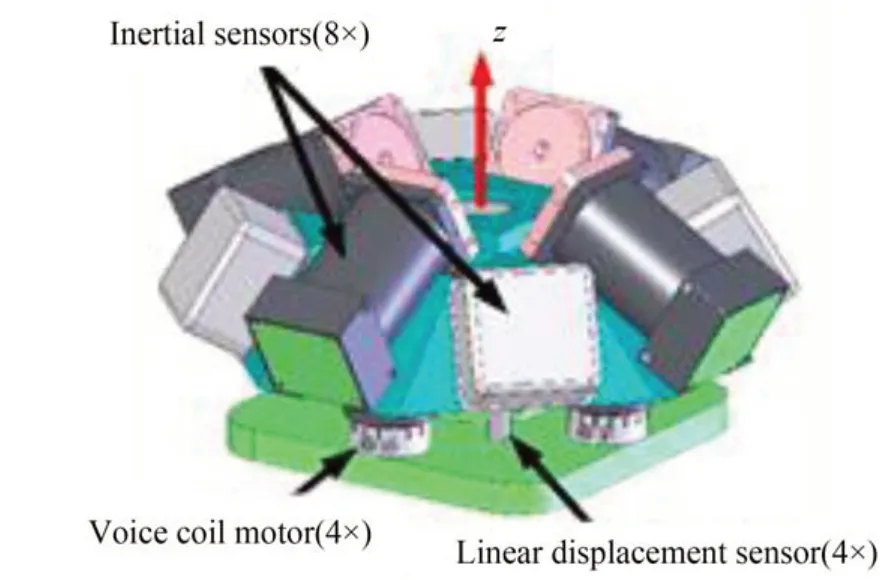
图9 光学惯性参考装置Fig.9 OIRU developed by BLUEHALO
2015 年,日本三菱电机先进技术R&D 中心利用MEMS 陀螺仪与BLUEHALO 公司的ARS-12 进行融合,研制了基于电磁驱动器的小行程MIRU(转角为±250 μrad)[19],如图10 所示。受限于MEMS 陀螺仪的精度,仅在ARS-12 单速率反馈下实现了10~200 Hz 带宽内1.4 μrad 的稳定精度。

图10 日本三菱电机先进技术R&D 中心设计的MIRUFig.10 MIRU developed by advanced technology R&D center
2017 年,为了满足NASA 深空光通信项目对亚微弧度光束稳定精度的要求,BLUEHALO 公司采用ARS-14 型传感器,设计了新一代以20 cm口径光学镜组直接作为负载的小行程(±5 mrad)MIRU[20]。在模拟终端振动功率谱作用下,实现了0.2~30 Hz 内-40 dB 的扰动抑制比和500 nrad 的稳定精度。
近年来,国外IRU 系统相关研究成果对国内严格封锁,未查阅到公开的技术和产品资料。
3.2 IRU 国内研究进展
相较于国外,国内对IRU 的研究开展相对较晚。
1997 年,西安应用光学研究所提出了在武装直升机上使用FSM 进行制导系统瞄准线及图像稳定与跟踪的二级稳定概念[21],20 Hz 内定频扰动条件下实现了14 mrad 的视轴稳定精度,这是国内IRU 技术的雏形。
2002 年,电子科技大学应用物理研究所设计了一个星间光通信跟踪子系统,该系统采用复合轴控制结构,由粗跟踪环和精跟踪环共同实现目标的跟瞄[22]。系统在模拟SILEX 振动功率谱作用下,跟踪均方根误差约为0.66 μrad,在模拟LANDSAT-4 的谐波扰动(1 Hz,100 μrad)下,跟踪误差小于2 nrad。
2005 年开始,中国科学院光电技术研究所联合电子科技大学和国防科技大学开始对运动载体光电跟瞄系统的视轴稳定技术进行研究,对视轴稳定系统关键部件——IRU 系统进行了理论分析和设计。
2005 年,翟伟采用BLUEHALO 公司的ARS-09 型传感器与重庆华渝电子仪器厂的XT-3A 动力调谐陀螺仪组合测量,设计了基于万向环架柔性机构的IRU,实现了无扰动条件下100 Hz 的位置闭环带宽[23]。然而,由于系统基座刚度不够,扰动条件下测试时,10~100 Hz 频率内存在明显的幅值畸变,35 Hz 处的幅值误差超过-5 dB。
同年,胡浩军采用线加速度计二次积分的方法辅助测量惯性姿态角,设计了音圈电机驱动型IRU[4],并采用图11 所示实验装置对系统性能进行了测试。结果表明:该系统可以获得75 Hz 的扰动抑制带宽和优于-50 dB 的扰动抑制比。然而,受限于加速度计及扰动平台的频率特性,系统带宽和稳定性能有待进一步测试和提高。
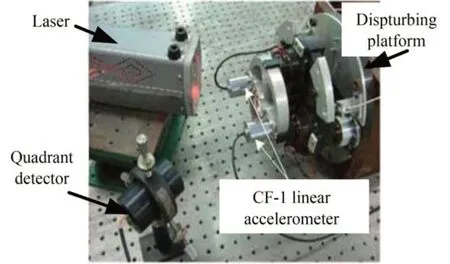
图11 线加速度计辅助测量的音圈电机驱动型IRU 实验系统Fig.11 Experimental system for voice coil motor-driven IRU
2016 年,田竞在基于虚拟陀螺的速度、位置双闭环结构的基础上加入MEMS 加速度计构成三闭环结构[5]。通过实验验证发现,采用MEMS加速度计和虚拟陀螺的三闭环结构系统将20 Hz以下的低频段的扰动抑制能力提升了15 dB,扰动抑制能力明显优于虚拟陀螺双闭环结构系统。
2019 年,毛耀提出通过MEMS 加速度计与MEMS 陀螺仪信息融合扩展系统扰动测量带宽的方案[24],并利用图12 所示的实验系统进行了测试。测试结果表明,该系统在单速度回路下实现了172 Hz 的闭环稳定带宽,但文献中并未对系统稳定精度进行测试,且存在严重的相位滞后。
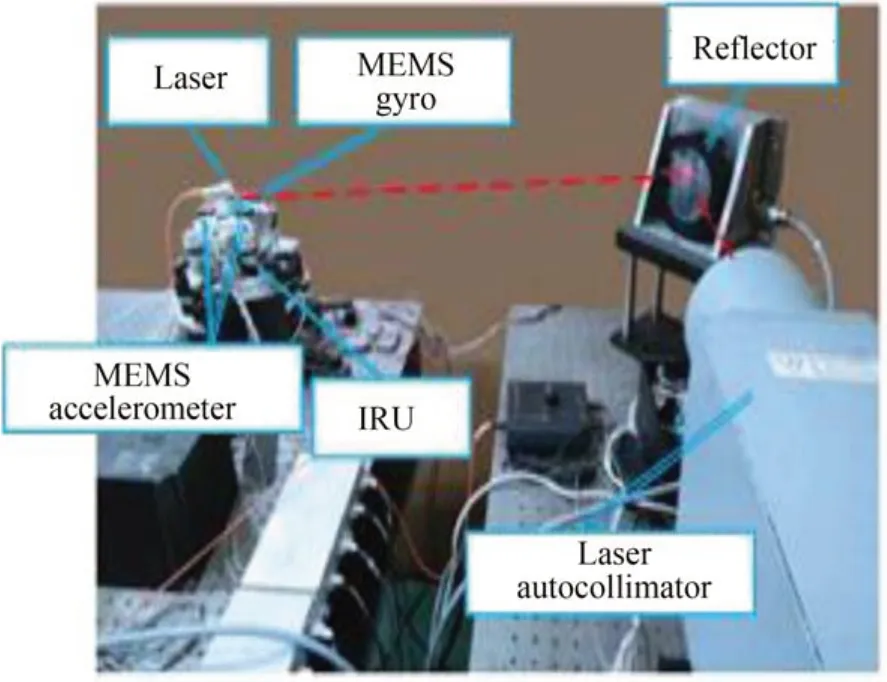
图12 MEMS 加速度计与MEMS 陀螺仪信息融合式IRU 实验测试系统Fig.12 Experimental system for MEMS accelerometer and MEMS gyroscope fusion IRU
同年,毛耀针对单级IRU 高频隔振能力不足的问题,提出了图13 所示的复合式结构[25],并对复合式IRU 的结构特性及闭环传递特性进行了分析。与单级IRU 相比,1 Hz 处的系统扰动抑制能力提高了50.09 dB,10 Hz 处的系统扰动抑制能力提高了26.85 dB。
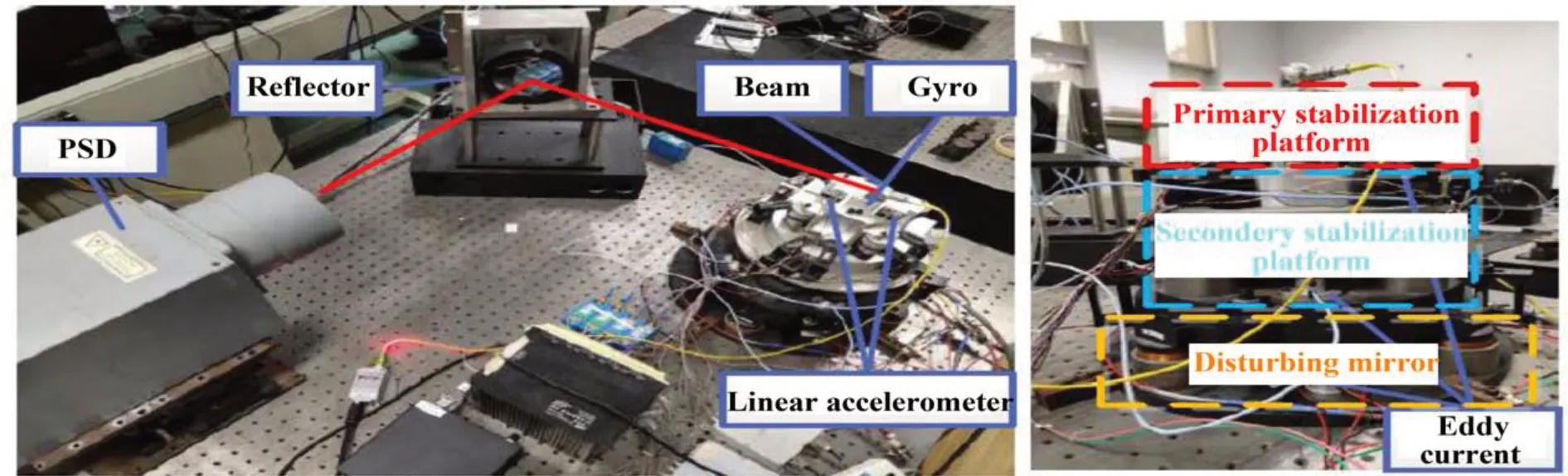
图13 复合式IRU 实验测试系统Fig.13 Composite IRU experimental test system
此外,天津大学和中国科学院长春光学精密机械与物理研究所也对IRU 系统展开了研究。截至目前,长光所已完成了基于柔性支承和框架式结构的IRU 设计,通过实验对系统性能进行了对比分析。结果表明,两种IRU 在动态频率特性和两轴运动解耦方面均表现良好,它们在0.5~100 Hz 带宽激励下的动态光束稳定精度分别达到7.934 μrad 和5.762 μrad[26]。
2017 年,天津大学李醒飞教授课题组基于自行研制的MHD 角速度传感器,开始对IRU 的结构设计、谐振抑制、控制策略等进行研究。目前,天津大学已完成IRU 系统的结构设计,实现了基于电涡流线位移传感器的IRU 位置闭环控制,带宽达到120 Hz[27],转角为±5 mrad,角分辨率优于1 μrad[28];实现了基于速度-位置双闭环的稳定控制,带宽达到60 Hz。但受限于所用MHD 角速度传感器的精度,仅实现了20 μrad 的稳定精度[29]。目前,该研究团队已成功研发带宽2~1 000 Hz,等效噪声角为25 nrad RMS 的MHD 角速度传感器,正在研发基于该款传感器的IRU,有望实现优于1 μrad 的稳定精度。
IRU 的国内外研究情况对比如表2 所示。可以看出,我国研制的IRU 系统扰动抑制带宽与国外相比低将近1 个数量级,稳定精度也与国外存在1 个数量级的差距,IRU 的研发水平远低于国外。
4 IRU 系统关键技术及研究现状
IRU 系统的简化控制框图如图14 所示,其中,Ha(s)表示传感器频响特性,θ̇n(s)为传感器误差。当IRU 工作在惯性稳定模式时,输入R(s)为零,则有:
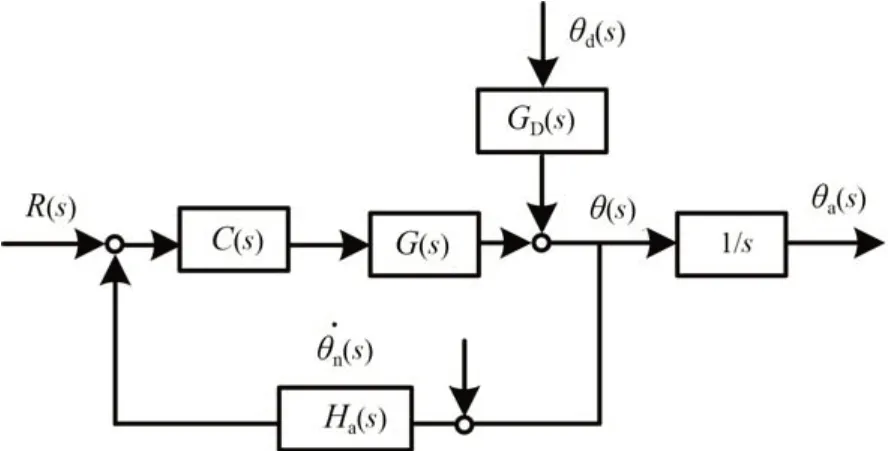
图14 基于惯性传感器组的IRU 闭环控制结构Fig.14 IRU closed-loop control structure based on inertial sensor group
由式(6)可以看出,IRU 系统的稳定精度由平台结构、惯性传感器和控制器共同决定。
4.1 平台支承结构
IRU 系统普遍采用图15 所示的两自由度柔性支承提供两个旋转自由度。受限于国外相关理论和技术的严格封锁,麻省理工Draper 实验室和BLUEHALO 公司仅在已有专利和文献[15]、文献[17]及文献[20]中给出了IRU 系统柔性支承的设计目标(工作方向上具有较低刚度,非工作方向具有较高刚度),但未见其设计过程及设计方法的详细分析。国内对于IRU 的研究开展相对较晚,关于其柔性支承结构的研究成果更是寥寥无几。文献[25]仿真分析了结构各向刚度系数的提高对系统稳定带宽设计产生的限制。文献[30]分析了支承结构固有频率与工作带宽间的关系,并根据需要的工作带宽对支承结构各阶固有频率和各向刚度提出了要求。文献[31]建立了结构转动刚度的解析计算式,给出了转动惯量近似定值条件下低阶固有频率的解析表达式,并根据工作带宽对各阶固有频率的要求,得出了结构设计的关键参数。上述研究主要集中于对IRU 支承结构刚度及固有频率的分析,并根据固有频率计算公式得出各方向上结构刚度的设计范围。
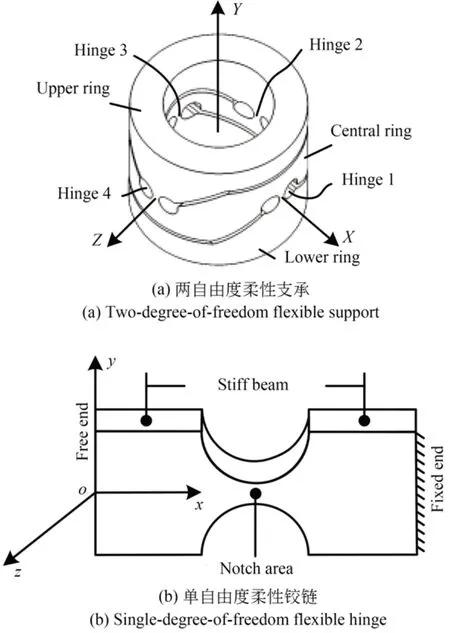
图15 柔性铰链结构示意图Fig.15 Schematic diagram of flexible hinge structure
两自由度柔性支承的刚度模型是实现其参数化设计的基础。针对这一问题,国内外学者普遍采用的思路是从单自由度柔性铰链的刚度模型出发,建立单自由度柔性铰链与两自由度柔性支承间的等效关系,进而得到支承体的柔度模型,实现参数化设计[32]。因此,单自由度柔性铰链的刚度精准建模成为IRU 系统柔性支承设计的关键。目前,单自由度柔性铰链的刚度建模方法主要分为四类,主要包括Paros 和Weisbord[33]、吴鹰飞[34]、陈贵敏[35]等采用的基于梁的近似微分方程及其积分理论的方法、Lobontiu[36]采用的基于卡氏第二定理的方法和Tseytlin[37]采用的逆保角映射法。针对应力集中引起的刚度计算误差问题,文献[38]、文献[39]采用有限元分析的方法量化了应力集中对直圆型柔性铰链和倒圆角型柔性铰链刚度计算的影响。在此基础上,文献[30]推导了考虑应力集中的直圆形柔性铰链各方向刚度计算解析计算式,并进行了仿真验证。上述刚度计算模型为IRU 系统柔性支承的参数化设计提供了有力支撑。但现有研究未考虑降低柔性支承工作方向刚度和提高其非工作方向刚度间的矛盾,无法实现结构应力、运动精度、几何尺寸等多约束条件下柔性支承的优化设计。多约束条件下的优化设计将成为IRU 系统支承结构研究的主要方向。
4.2 基于数据融合的宽频角速度测量
高带宽、低噪声、漂移小的惯性角速度传感器是IRU 实现宽频带扰动抑制的测量基础。但仅靠单一的角速度传感器难以同时满足kHz 带宽、亚微弧度级噪声等性能指标。采用具有不同频带特性的传感器进行数据融合,是解决上述问题的有效途径。目前,互补滤波、闭环控制滤波等基于频率特性进行融合滤波器设计的方法以及维纳滤波、卡尔曼滤波、自适应平方根滤波等基于时域的融合算法是通过数据融合方式实现宽频角速度测量的有效手段。
基于频域的数据融合方法一般通过设计融合滤波器,抑制两个传感器直接叠加造成的重合频段幅值凸起。文献[40]提出了一种互补滤波方法,如图16(a)所示,将动力调谐陀螺仪和角位移传感器进行融合,实现了带宽为0.1~300 Hz,最大幅度失真为0.3 dB,最大相位失真为1.9°的融合效果。但互补滤波法十分依赖于待融合传感器传递函数建模精度,且设计的互补滤波器可能存在传递函数中零点个数大于极点个数的情况,导致其无法硬件实现。文献[41]提出了一种闭环控制滤波的融合方法,如图16(b)所示,并利用此方法完成了低带宽IRU 和高带宽角位移传感器的数据融合,实现了0~100 Hz 的测量带宽。但传统的闭环控制滤波方法中滤波器设计方法不明晰,无法实现参数化设计。针对该问题,文献[42]利用“相位补偿”高通滤波器将MHD 角速度传感器的低频极点向高频移动,再与MEMS陀螺仪直接叠加,实现了0~40 Hz 内幅值波动≤1%,相位波动≤±1°的融合效果,但受限于转台频率特性,算法融合效果有待进一步测试和验证。此外,文献[24]给出了闭环控制滤波的最优校正方法,通过反向设计控制器的方式简化了该算法的参数整定过程,并对MEMS 陀螺仪和MEMS 加速度计进行融合,最终实现了最大幅值误差-2.1 dB,最大相位误差17°的融合效果。
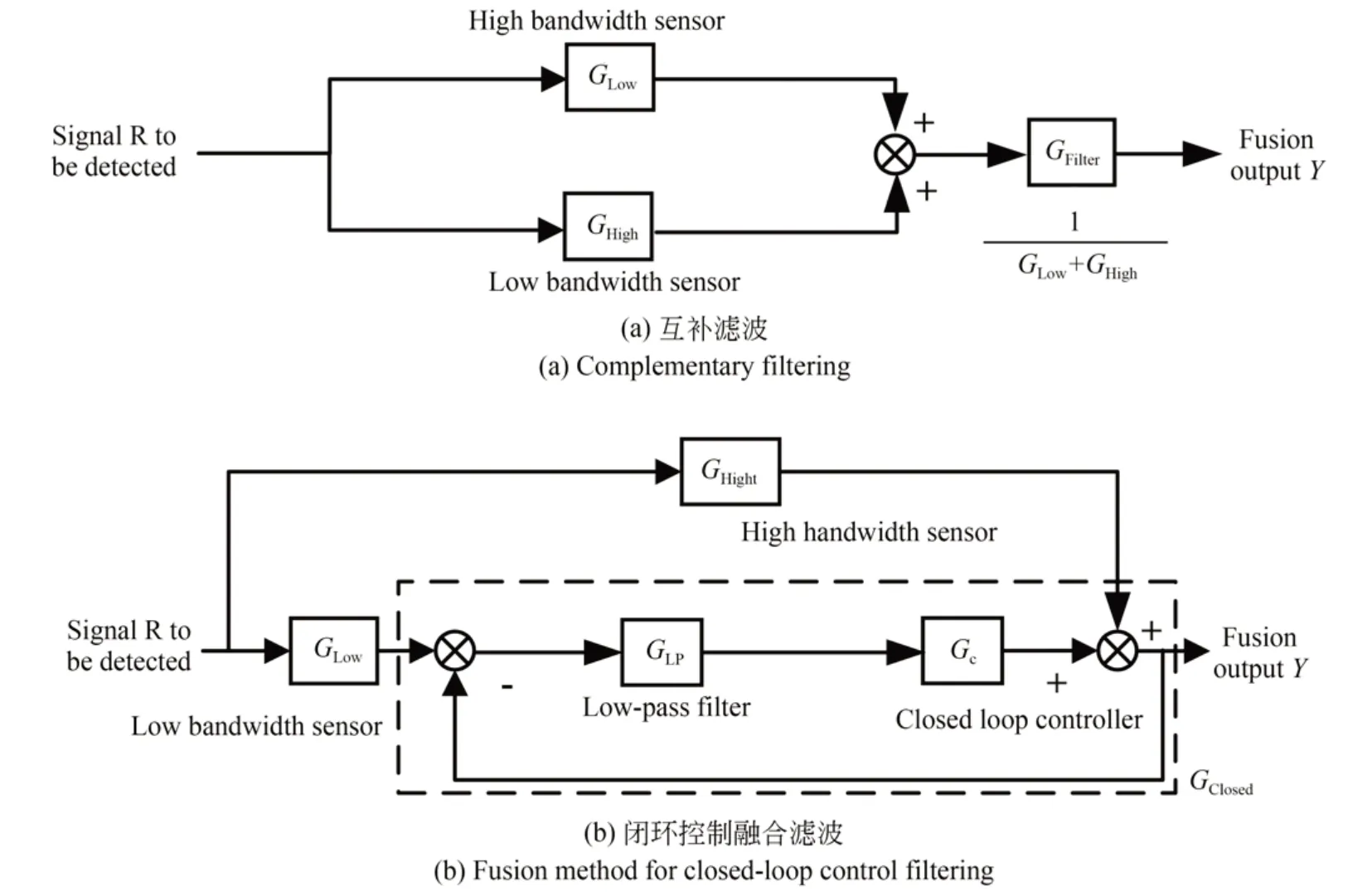
图16 融合滤波原理图Fig.16 Fusion filtering schematic
基于时域的数据融合方法一般采用维纳滤波、卡尔曼滤波等算法实现含噪信号的最优估计。文献[43]采用维纳滤波和卡尔曼滤波两种方法将低频精密姿态确定系统和高频ADS 进行融合。最终,维纳滤波的估计误差为0.075",卡尔曼滤波的估计误差为0.117",但仅对0~10 Hz内的融合效果进行了实验测试,且融合输出在有限长数据段的首尾部分发生了较大畸变。文献[44]提出了一种基于Allan 方差的解耦自适应卡尔曼滤波算法,采用Allan 方差值代替传统卡尔曼滤波中不变的量测噪声值,在每一次滤波迭代计算中同时递推估计信号的量测噪声,从而贴近当前噪声的实际情况,但并未直观评估融合信号的频响和噪声特性。在实际工程运用中,由于舍入误差的影响,卡尔曼滤波中的协方差矩阵不再保持原本的正定性,易使滤波发散。针对该问题,文献[45]提出了一种自适应平方根滤波算法,该算法利用其协方差矩阵的平方根进行传递,从而保证协方差矩阵的正定性,最终完成0~60 Hz 频段内最大标度因数抖动小于2.5%,非线性误差小于1%的角速度测量。
上述研究从频域和时域两个方面实现了惯性传感器的全频带数据融合。互补滤波、闭环控制滤波等频域融合算法对传感器的频域输出特性进行处理,其融合目的主要是获得幅频响应平滑、相频响应不失真的融合信号,其原理简单、易实时实现,但无法兼顾噪声、漂移等指标。维纳滤波、卡尔曼滤波等时域融合算法通过在时域上进行迭代来预测下一时刻的最优估计值从而完成信号的融合,能有效地对融合信号的噪声进行抑制,但由于存在噪声参数耦合、算法更新迭代中协方差矩阵易失去正定性等问题,容易导致滤波发散。单一的时域或频域融合方法均无法兼顾噪声、频响、漂移等指标。为了实现多指标的优化,可以采用多种不同的数据融合算法实现分频段融合。
4.3 稳定控制技术
IRU 系统的稳定控制面临以下三个方面的问题:一是柔性支承引入的带宽内机械谐振;二是单速度控制回路面临的控制饱和问题;三是传感器噪声、驱动器噪声、模型不确定性等内部扰动和基座扰动等外部扰动对系统稳定性的影响。
针对带宽内机械谐振的抑制问题,学者们常采用加入速度反馈、陷波器两种方式。速度反馈方面,常见的方法为设计速度环控制器。加入控制器虽然能使谐振得到一定的抑制,但难以兼顾控制效果和谐振抑制效果。为解决该问题,陷波器被应用于系统中。文献[46]中利用改进的双T 型陷波器,实现了IRU 系统带宽内机械谐振的抑制。针对陷波器经验法调参存在的方向不明确问题,文献[47]提出了一种陷波器参数优化设计方法,通过与未加陷波器的方法对比,发现未加陷波器系统仅靠反馈控制无法完整抑制谐振峰,闭环带宽仅为7.96 Hz。而加入陷波器后系统闭环带宽可达到110 Hz,带宽得到了极大的扩展,证明了陷波器对谐振抑制的有效性。上述文献中使用的陷波器均是对称的,而实际系统中的陷波器是不对称的。针对这一问题,文献[48]提出采用非对称陷波器来抑制系统谐振的方法,使用适应度函数来表示谐振抑制的效果,并用粒子群算法来搜索函数的最优解,得到非对称陷波器的参数。实验结果表明与补偿前的28.7 dB 相比,谐振峰值被抑制了97.88%。传统的陷波器都是针对固定频率的,而随着安装位置的变化,谐振频率可能发生变化,为了快速获取准确的谐振频率,自适应滤波器被提出。常见的方法有快速傅里叶变换(FFT)算法[49]、滑动离散傅里叶变换(DFT)算法[50]谐波检测与陷波器相结合等方法,但这些该方法在谐振频率检测中存在计算延时等问题,目前学者们多通过优化谐振频率检测算法的方法提高实时性。文献[51]提出了一种基于自适应陷波滤波器的机械谐振频率估计算法,使用该方法得到的结果作为中心频率设计了陷波器应用于伺服系统中,有效抑制了电机转速振荡,转速误差最终保持在7 r/min 之内,衰减比例达到91.2%。综上,改善滤波器结构和改善谐振频率检测算法都是提高IRU 系统谐振抑制能力的有效手段。
针对单速度控制回路的控制饱和问题,学者提出了双闭环(DFC)、多闭环控制(MFC)结构。多闭环结构系统的扰动抑制能力由各环路扰动抑制能力共同决定,对扰动的抑制能力优于单闭环、双闭环结构,其结构图如图17 所示。在惯性稳定平台上,常安装光纤陀螺和MEMS 加速度计以测量平台的惯性空间速度和加速度。而光纤陀螺体积、质量大,在载体平台上额外安装光纤陀螺测量扰动时,会增加系统的硬件成本,也会引入新的硬件不可靠性[52]。为解决该问题,不少学者利用MEMS 线加速度计估计平台的角速度信号,通过积分得到速度信息,替代陀螺传感器,并以此实现系统的三闭环控制。文献[5]在基于虚拟陀螺的双闭环结构的基础上加入MEMS 加速度计构成三闭环结构,将20 Hz 以下的低频段的扰动抑制能力提升了15 dB。文献[53]基于CCD、虚拟速度和线加速度计信号实现三闭环控制,与基于CCD 和线加速度计构成的双闭环结构相比,位置闭环带宽增加了1 Hz,并且在低频1~5 Hz 内系统的扰动抑制能力得到了明显提升。各环常用的控制方法有加入陷波器、PID 控制器、扰动观测器(DOB)、误差观测器(EOB)和扩张状态观测器(ESO)等。
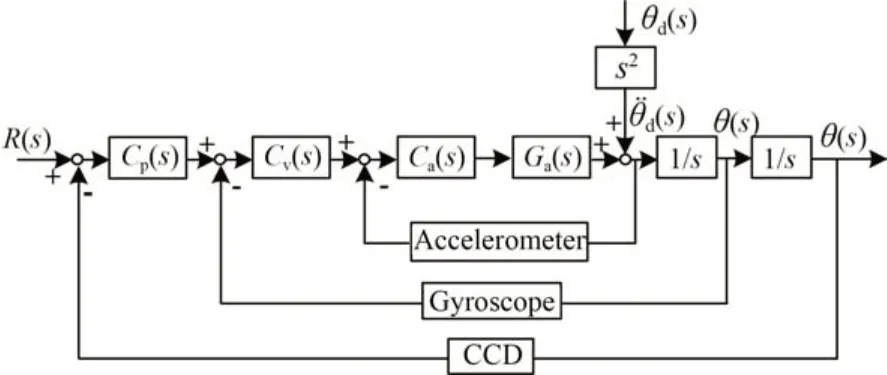
图17 速度-位置-加速度三闭环控制结构Fig.17 Speed-position-acceleration triple closed-loop control structure
传感器噪声、驱动器噪声、模型不确定性等内部扰动和基座扰动等外部扰动问题可通过DOB,EOB,ESO 来解决。DOB 方面,文献[54]采用位置-速度-加速度三闭环结构并在加速度环加入了DOB 来控制FSM 系统,实验发现DOB的引入能很好地提升系统中频扰动抑制能力,而在低频则基本无效果。为提高系统低频扰动抑制能力,学者在DOB 结构上进行了改进。文献[55]采用位置-加速度双闭环结构并在加速度环加入了改进的DOB(EDOB)来控制快反镜系统,有效改善了系统低频扰动抑制能力。当系统存在非最小相位特性时,传统DOB 方法会牺牲大量的扰动抑制能力来保证系统的稳定性,针对该问题,文献[56]设计了一种基于双补偿器扰动观测器(DC-DOB)应用在多闭环反馈控制系统中的加速度回路。文献[57]将速度-位置-加速度三闭环控制结构应用于非最小相位远距离激光指向系统,其中的加速度环加入了补偿扰动观测器(CDOB)。两者与传统DOB 相比均有效地抑制了更多的扰动。此外,学者还采用DOB 与PID控制器、EOB 相结合的方法提升系统的扰动抑制能力。文献[58]提出了位置环基于CCD 的EOB与速度环基于光纤陀螺的DOB 相结合的结构来提高系统的抗干扰能力。文献[27]提出了不完全微分PID-噪声抑制DOB 复合型控制结构,有效抑制了传感器测量噪声及电机驱动器噪声,使系统闭环带宽大幅提高,最终实现了110 Hz 的位置环闭环带宽。文献[59]通过改进Q滤波器设计了改进噪声抑制DOB,实验验证发现该方法对干扰的抑制率为88.60%。ESO 方面,文献[60]设计了一种频域融合虚拟陀螺仪并将其应用于扰动前馈与位置、速度、加速度三闭环相结合的控制结构中,该方法能够充分发挥扰动前馈控制的作用,有效提高了系统在1-100 Hz 频带范围内的扰动抑制能力。文献[61]将一种带模型构造线性扩张状态观测器的虚拟双闭环反馈控制应用于快速倾斜反射镜平台,有效提高了在中低频段的扰动抑制能力。综上,目前的研究围绕控制结构的优化展开,如采用电流-速度-位置、加速度-速度-位置等多闭环控制结构,并对各控制回路中的DOB,EOB,ESO 等进行优化设计。
5 应用现状与展望
IRU 能够提供一束不受基座角扰动影响的惯性参考光束,同时能够调整光束的空间位置,起到跟踪的作用。基于IRU 的视轴稳定方案如图18 所示,参考光束和目标光束经过相同的光路,经FSM 反射后,到达准直探测器前端的分光镜上。初始系统对准后,准直探测器上的某个标称位置便代表了仪器视轴的成像点。当存在基座角扰动时,参考光轴偏离惯性稳定轴,惯性传感器测量两者间的角偏差α,反馈至IRU 的控制器,驱动平台执行机构产生反作用力矩,使得惯性稳定轴与参考光轴重合,即α=0。此时,准直探测器测得仪器视轴与参考光轴间的角偏差为β,利用其输出控制FSM,使参考光束的成像点与仪器视轴的成像点重合,此时仪器视轴与参考光轴平行,基座角扰动引起的视轴抖动也得到了抑制。当目标位置发生变化时,目标的位置由精探测器(图中的精CCD)敏感,这一角偏差驱动IRU 转动指定角度,使参考光轴与目标视轴重合,即γ=0,进而实现目标的稳定跟踪。目前,基于IRU 的视轴稳定方案已成功应用于空间尺度激光通信、遥感成像等领域。
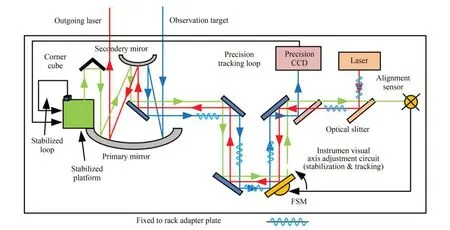
图18 IRU 辅助FSM 实现精稳定/跟踪系统示意图Fig.18 Schematic diagram of precision stabilization/tracking system with IRU assisting FSM
5.1 应用现状
5.1.1空间尺度激光通信
空间尺度激光通信是星地及星间等远距离激光通信概念的总称,通信激光束的宽度(束散角)在10 μrad 左右[62],要求光束稳定精度优于1.7 μrad。目前,基于IRU 的视轴稳定方式已成功应用于美国的月球激光通信演示验证(Lunar Laser Communication Demonstration,LLCD)试验,曾被计划用于小行星撞击任务(Asteroid impact mission,AIM)和火星激光通信验证(MARS Laser Communication Demonstration,MLCD)项目。未来,可将基于IRU 的视轴稳定方式应用于更多的空间通信技术中。
5.1.1.1 月球激光通信演示验证(LLCD)试验
为了验证基于IRU 的视轴稳定方式在远距离激光通信领域应用的可行性,美国NASA 开展了LLCD 项目,并于2005 年委托麻省理工学院(MIT)林肯实验室开始进行LLCD 系统的研发。LLCD 系统由月球激光通信空间终端(Lunar Laser Communication Space Terminal,LLST) 和月球激光通信地面终端(Lunar Laser Communication Ground Terminal,LLGT)组成。 其中,LLST 继承了MLCD 任务的设计,使用BLUEHALO 公司研制的小行程(±1 mrad)MIRU 作为两轴机架系统(稳定精度350 μrad)的负载,如图19 所示[63]。LLCD 进行演示时,MIRU 能测量和补偿LADEE 飞船上的振动来保持惯性稳定,最终实现了近半球的光束调整范围和4~300 Hz带宽内2.5 μrad 的光束稳定精度。NASA 开展的LLCD 试验创造了历史,以破纪录的下载速度——高达622 Mbit/s,利用脉冲激光束完成地月(相距38.44 万千米)之间的数据传输[64]。
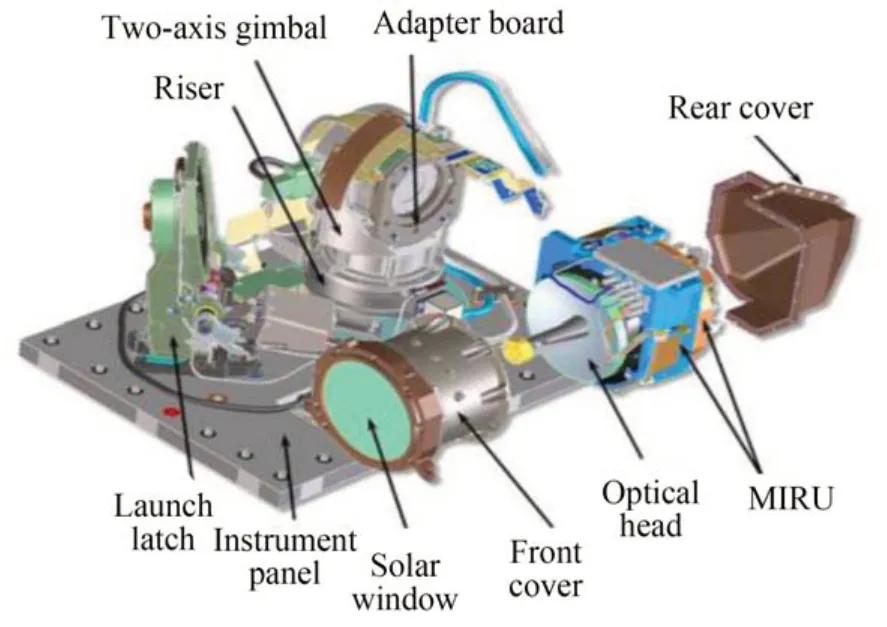
图19 月球激光通信终端光学模块Fig.19 Lunar Laser Communication Space Terminal(LLST)
5.1.1.2 小行星撞击任务中的深空激光通信终端
2015 年,NASA 与欧洲航天局(ESA)合作开展“行星撞击与偏转评估(AIDA)”项目,其中包含2 个子项目,分别为NASA 负责的“双星重定向试验”(DART)撞击器任务和ESA 负责的AIM 环绕器任务。其中,DART 航天器的任务是撞击Dimorphos 行星,AIM 环绕器则负责对撞击过程以及撞击后的行星表面进行观测和评估。在AIM 中,ESA 将LLCD 试验中的光通信终端进行改造,设计了AIM 环绕器的通信终端——OPTEL-D,如图20 所示[65]。但由于德国2016 年的撤资,ESA 取消了AIM 计划。
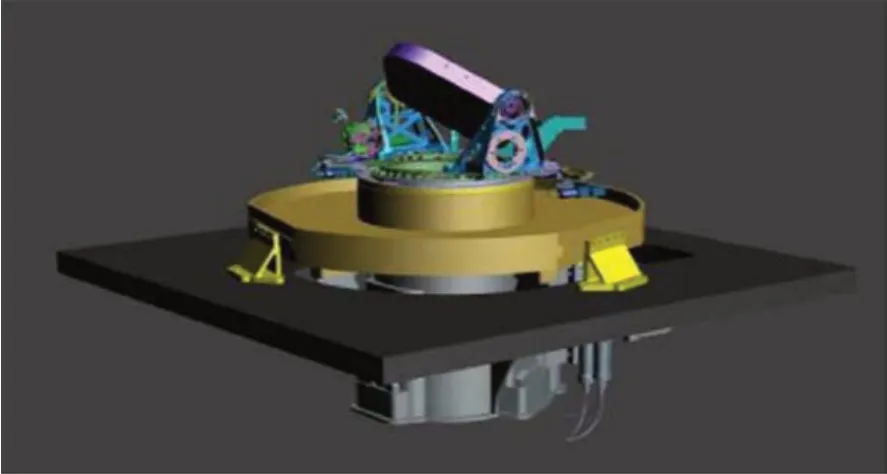
图20 OPTEL-D 示意图Fig.20 Schematic of OPTEL-D
5.1.1.3 火星激光通信验证
NASA 于2003 年开始执行MLCD 项目,目的是提供深空光学链路的早期经验。该项目由NASA/戈达德航天飞行中心(GSFC)管理,其星上子系统由MIT 林肯实验室研制,如图21 所示。地面子系统则由JPL 和MIT 林肯实验室共同研制,将在400 万公里的超长链路距离条件下实现1~10 Mb/ s 通信速率[66]。2004 年10 月MLCD项目成功完成了系统要求评审,又于2005 年3 至5 月完成了星上终端与地面终端的初步设计评审。星上终端计划在火星通信轨道器(MTO)上进行飞行试验,原定于2009 年10 月发射。后来由于NASA 内部的计划变更,终止了MLCD 项目。其中,MLCD 的激光通信终端使用BLUEHALO 研制的IRU 提供参考光束,以抑制MLT望远镜光学模块中的机械抖动。
5.1.2遥感稳像
随着研究和应用领域的不断拓展,对于高分辨、宽幅遥感图像需求与日俱增,这需要光学遥感卫星观测距离更远、分辨率更高,也导致对平台稳定性要求越来越严格。对地观测卫星平台(数百千米)的指向精度要求小于10 μrad,光学与微波等遥感系统(数百~数万千米)指向精度一般小于1 μrad,甚至要求小于0.05 μrad。国外稳像技术发展比较早,从最早的单一稳像技术到现在的综合稳像技术,已逐步应用在空间光学遥感器上,取得了较好的效果,但对我国实行严格的技术封锁。国内在基于IRU 的图像稳定方面的研究起步比较晚,仅有中国科学技术研究院遥感卫星研究所、长春光机所等单位进行了初步的实验研究[67],但还未实现应用。
2021 年,中国科学技术研究院遥感卫星研究所的岳荣刚等人利用IRU 实现图像像移测量,并实现了振动干扰下的图像复原[68]。该文献并未提及使用的IRU 技术指标,利用IRU 测量信息与哈特曼传感器测量信息的对比,验证了基于IRU的像移测量精度,实现了退化图像的恢复。结果表明,基于IRU 的像移测量方法具有较高的精度,误差均方根值小于0.12 像素。当图像像移小于3.5 像素时,基于IRU 像移测量信息的图像复原方法能够将图像的调制传递函数(Modulation Transfer Function,MTF)提升至退化图像的1.61~1.88 倍。
2022 年,长春光机所的王昱棠等基于自研的IRU,实现了大口径光电成像系统的稳定[26],系统原理如图22 所示。实验发现,无IRU 的系统像质迅速恶化,空间频率为20 lp/mm 时对应的MTF 下降到0.2 以下,而配有IRU 的系统的MTF 高于0.65。空间频率为30 lp/mm 时未配有IRU 的系统的MTF 趋近于0,而配有IRU 的系统的MTF 保持在0.4 以上,配备IRU 的光学系统与未配备IRU 的光学系统相比表现出更好的成像性能。

图22 带光束稳定平台的大孔径电子光学系统示意图Fig.22 Schematic diagram of large-aperture electro-optical system with Optical-beam Stabilization Platform (OBSP)
5.2 展 望
5.2.1量子通信——“墨子号”卫星
量子通信是指通过量子纠缠效应实现信息传输的一类通信技术,具有超强安全性、超大信道容量、超高通信速率、超高隐蔽性等特点,是当今最具挑战性的科技之一[69]。为推进量子通信技术的发展,2016 年8 月16 日,我国于酒泉卫星发射中心成功发射了全球第一颗设计用于进行量子科学实验的卫星—“墨子号”卫星。该卫星的ATP 有效载荷系统如图23 所示,包括信标激光器、粗跟踪相机、精跟踪相机、两轴反射镜、FSM 等,跟瞄精度达到0.4 μrad[70]。2022 年,中国科学技术大学潘建伟院士团队利用“墨子号”卫星首次实现地球上相距1200 公里的两个地面站之间的量子态远程传输,向构建全球化量子信息处理和量子通信网络迈出了重要一步[71]。未来,可考虑使用更高性能的IRU 替代信标激光器应用于“墨子号”卫星的光电跟瞄系统中,以进一步提高其跟瞄精度。
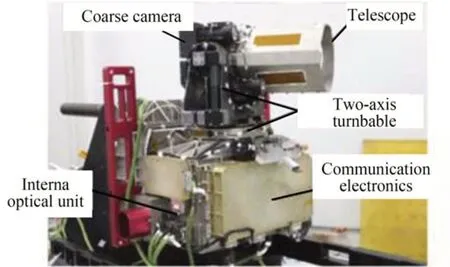
图23 “墨子号”卫星的ATP 有效载荷Fig.23 ATP payload of Micius satellite
5.2.2低轨卫星通信遥感融合
低轨卫星系统是获取空间信息和破解宽带数字鸿沟的重要基础设施之一,通信与遥感融合是解决现有遥感和通信分治、卫星重置、应急业务响应不及时等问题的有效途径[72]。为推动我国低轨卫星通信遥感一体化技术发展,2022 年3月5 日,我国在西昌卫星发射中心用长征二号丙运载火箭,成功将我国首次批量研制的银河航天02 批批产卫星(包括“北邮-银河号”卫星在内的六颗低轨宽带通信卫星和一颗遥感卫星)送入预定轨道[73]。2023 年7 月12 日,中国航天科工集团宣布正式启动超低轨通遥一体卫星星座建设,计划于2030 年完成300 颗星组网运行,提供可见光、合成孔径雷达、高光谱、红外多类型全时向遥感服务体系,形成全球15 分钟响应能力[74]。低轨卫通信遥感融合技术是世界各国未来的研究重点之一,IRU 作为视轴稳定系统的核心部件,必将在低轨卫星通信遥感融合建设中发挥重要作用。
5.2.3机载、车载、船载
除了上述提及的应用于星载平台,IRU 也可应用于机载、车载、船载平台。例如,利用IRU 进行惯性稳定可将高能激光束精准投送到远距离目标上、配有红外望远镜的飞机可在IRU 协助下完成观测工作等等。未来可将IRU 越来越多地应用在机载、车载、船载平台。
6 结 论
运动平台光电跟瞄系统中,IRU 的主要作用是为光电跟瞄系统提供一束不受扰动影响的惯性参考光束。本文对IRU 及其应用情况进行综述。首先,从视轴稳定系统的原理出发,介绍了利用IRU 辅助FSM 实现视轴自准稳定的技术方案,指出平台式IRU 相较捷联式IRU 的优势。之后,从基于柔性支承的平台式IRU 工作原理出发,阐述了系统惯性稳定/惯性稳定跟踪两种工作模式,建立了系统数学模型。其次,综述国内外IRU 产品的研究进展,指出我国在IRU 研发上与国外先进水平存在的差距:扰动抑制带宽与稳定精度与国外相比低大约1 个数量级,分析支承结构、惯性传感、控制系统三项关键技术在提高IRU 扰动抑制能力方面的作用,梳理三项关键技术研究现状的基础上,指出三项关键技术的未来研究方向。最后,总结了IRU 的空间应用情况,指出IRU 在我国空间尺度激光通信、遥感稳像等领域的应用潜力。研究结果有助于致力于视轴稳定技术研究的学者们快速全面地了解IRU 的研究现状和发展趋势,为进一步提升IRU 系统的综合性能提供有益借鉴。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
航空兵器(2020年5期)2020-12-03
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
小学科学(学生版)(2016年1期)2016-10-09
重庆邮电大学学报(自然科学版)(2016年3期)2016-07-04
应用光学(2015年1期)2015-06-01
系统工程学报(2015年2期)2015-02-28