PLC 控制技术在农业机械电气控制系统中的应用效果和可靠性分析*
2024-02-25 08:55闫兴瑞
南方农机 2024年4期
闫兴瑞
(酒泉职业技术学院,甘肃 酒泉 735000)
随着社会经济水平的不断提升,我国农业机械化程度不断提高,但是,目前部分地区农业机械生产仍然依赖于人工作业模式,对自动化控制系统的推广和应用不足[1]。在这样的背景下,本文以农业机器人电气控制系统、全自动码垛机电气控制系统为案例,研究PLC 控制技术在农业机械电气控制系统中的应用效果。强化对PLC 控制技术的应用具有重要意义,可以促使农机智能控制程度不断提升,推动农业生产向智能化、数字化方向不断发展[2]。
1 PLC控制技术概述
1.1 PLC控制技术定义与特点
可编程逻辑控制器(P r o g r a m m a b l e L o g i c Controller, PLC)控制技术作为一种常用的电子计算机技术,被广泛地应用于自动化控制领域。运用该技术,可以对机器和设备的运行过程和状态进行实时化、智能化控制,提高产品智能化生产程度[3]。中央处理器(CPU)作为PLC 的重要组成部分,借助输入输出接口,与外部设备之间建立良好的通信关系,并严格按照预设的逻辑规则智能化控制设备。借助编程软件,可直接编写和修改PLC 程序,从而满足不同应用场景。另外,PLC 控制技术具有易编程、可靠性高、功能强大等特点,在农业机械电气控制系统中凸显出重要应用价值[4]。在应用PLC 控制技术时,可借助PLC 控制系统,智能化管控农业机械电气控制系统运行性能,实现农业机械数据的自动化采集和分析,为保证农业生产的精确性和高效性提供重要的技术支持。
1.2 PLC控制技术分类
目前,PLC 控制技术主要分为以下两种类型:1)现场总线控制系统。该系统内含有海量的网络节点,通过将其应用于农业机械电气控制系统中,可以实现对数据的高效化、精确化传输,为保证设备生产质量和效率提供一定的辅助性作用,同时,还提升了电气控制系统的网络通信性能。2)分散控制系统。该系统主要适用于集中式控制、危险性管理等领域。该系统综合运用了通信技术、人工智能技术和物联网技术等现代化技术,借助稳定良好的网络环境,确保生产部门与建设站之间形成良好的互通互联关系,以达到统一化管理重要信息的目的。
2 PLC 控制技术在农业机器人电气控制系统中的应用
2.1 系统设计
2.1.1 农业机器人智能控制结构设计
该农业机器人作为一种常用的水果采摘机器人,主要用于对水果的智能化采摘。该农业机器人电气控制系统主要由伺服单元、末端执行器、机械手、机器视觉系统等部分组成。农业机器人电气控制系统工作流程如下:首先,在履带式行走机构的驱动下,农业机器人快速前进并移动到果树前,由机器视觉系统利用工业相机完成对所有果树水果图像的拍照,并按照所设置好的顺序,对末端执行器与待采摘水果位置之间的距离进行精确化计算,然后对采摘机械手采摘路线进行科学规划。当末端执行器精确移动到待采摘果树目标位置前,工业相机可自动完成对目标果实图像的拍摄,并对果树的重心进行有效提取,然后对下次采摘目标移动路线进行科学规划,为下个果实的自动化采摘打下坚实的基础。总之,农业机器人会严格按照上述步骤进行循环处理,当目标区域内的所有水果全部采摘完毕后,可自动移动到下一个采摘区域中,从而达到智能化采摘果实的目的[5]。
2.1.2 PLC控制系统设计
PLC 控制系统属于农业机器人电气控制系统的重要组成部分。应用PLC 控制系统,不仅可以智能化控制末端执行器,还能确保各个工控机中上位机之间建立良好的通信关系。在PLC 控制系统软件中,主要包含4 个程序段,其中:程序段1 为故障报警控制;程序段2 为变频电机驱动控制;程序段3 为行走控制;程序段4 为目标果实识别定位。PLC 控制系统主程序框图如图1所示。
2.1.3 WinCC 上位机监控系统设计
在农业机器人电气控制系统中,为确保各个远程上位机之间建立良好的通信关系,需要借助视窗控制中心(Windows Control Center, WinCC),提高农业机器人监控系统运行性能。农业机器人监控系统在具体应用时,需要借助WinCC,确保工控机与农业机器人之间形成良好稳定的信息共享关系。WinCC 和农业机器人通信流程如图2所示。
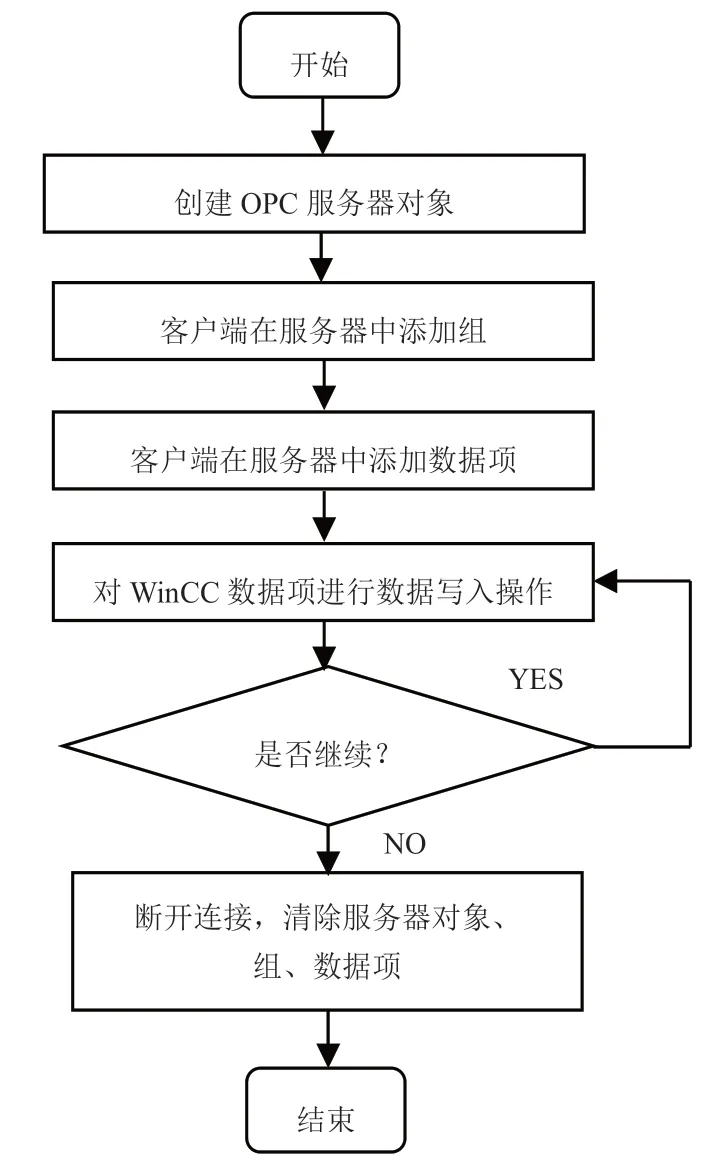
图2 WinCC 和农业机器人通信流程
2.1.4 驱动系统模块设计
在农业机器人中,借助变频器,可以驱动各个关节进行有效移动,为保证对农业机器人各个关节控制的精确度,需要在各个关节部位安装和固定相应的电机。为保证农业机器人的实际应用效果,需要做好对农业机器人生产成本的控制。所以,在设计驱动系统模块时,优先选用ZVF9V-Z型号变频器,从而实现对电动机驱动控制系统的搭建。为保证驱动系统的定位精确度,避免驱动系统运行期间出现振荡问题,需要采用半步工作方式进行运行。
2.2 系统应用效果
当农业机器人电气控制系统设计完成后,需要对该系统的有效性和可靠性进行验证和测试。通过进行多次果园采摘测试,发现农业机器人均可以完成果实采摘目标,取得良好的采摘效果[6]。与人工采摘模式相比,应用农业机器人电气控制系统,有效地提高了果实的采摘速度,同时,该电气控制系统表现出运行稳定可靠、抗干扰能力强等特点。
3 PLC 控制技术在全自动码垛机电气控制系统中的应用
3.1 系统设计
全自动码垛机电气控制系统工作原理如下:借助回转气缸、翻转机构、平移机构等多个机构,全面码垛处理目标作物秸秆[7];借助限位开关,精确化、智能化控制码垛机各个部分;利用各类传感器,检测和判断各个机构是否运动到预设的位置。应用全自动码垛机,可以识别农作物秸秆料包大小,并对其姿势进行科学调整,以达到码垛处理物料包的目的。全自动码垛机电气控制系统设计内容如下。
3.1.1 I/O端子分配
结合该电气控制系统的输入信号和输出信号,分配处理PLC 的I/O 端子。在进行输入点分配时,将I0.0、I0.1、I0.2 分别设置为启动、停止、急停三种状态;将I0.6、I0.80、I2.2 分别设置为进料正极限、进料反极限、运输带正极限。在进行输出点分配时,将Q0.6、Q0.7、Q1.2 分别设置为运输带电机、回转电机正转、回转电机反转;将Q1.3、Q1.7 分别设置为提升电机正转、提升电机反转[8]。
3.1.2 变频调速控制系统
在全自动码垛机中,需要智能化调整和控制输送机速度和回转马达的转动速度,同时,还要保证该系统具有宽泛的调节区间。为保证速度控制模块设计和实现效果,需要结合实际应用需求,借助变频调速控制系统,对相关机构的速度进行智能化调整和控制。变频调速控制系统运行原理如下:借助PLC,从系统屏幕上获取用户所设置的码垛速度,然后,对码垛速度进行换算,使其换算为对应的作业频率。接着,借助PLC,对变频器脉冲值进行调整,以达到智能化控制电机变频速度的目的。
3.1.3 伺服驱动系统
在全自动码垛机电气控制系统中,借助运输带,需要将物料传输和发送至方便抓取手搬运的位置,然后,再次返回到原始位置,为下次传输操作做准备。此外,运输带在运行期间,必须保证所运输的物料精确地转移到所设定好的位置。为保证运输带位置控制的精确度,需要运用交流伺服控制系统,精确化控制运输带的移动位置。在设计伺服驱动系统时,运用PLC 控制器,完成对伺服驱动器脉冲频率的精确化设置,从而达到智能化、精确化控制伺服系统转动速度的目的[9-10]。伺服驱动系统在具体运行时,需要借助PLC 控制器,参照脉冲个数,智能化控制电机转动角度,从而快速、精确地确定驱动设备当前运动位置。伺服电机设计原理如下:在PLC 脉冲输出模式下,伺服电机借助同步齿形带,驱动传输带精确地运行至指定位置,并借助定位器实时检测传输位置是否正确。
3.1.4 PLC程序流程
在全自动码垛机电气控制系统中,借助PLC控制器,可以智能化控制运输带传输、抓取夹夹紧、抓取夹松开三个环节。该电气控制系统软件控制流程如下:1)进行I/O 初始化处理,确保PLC 控制器处于正常启动状态;2)借助PLC 控制器检测上料是否成功,如果成功,自动启用运输带,反之,则上料失败,需要再次进入上料检测环节;3)检测上料是否到位,如果到位,提升电机缓慢下降,并借助抓取夹快速夹紧气缸,然后,提升电机缓慢上升,抓取夹置于松开状态,码垛操作圆满完成。PLC程序流程如图3所示。
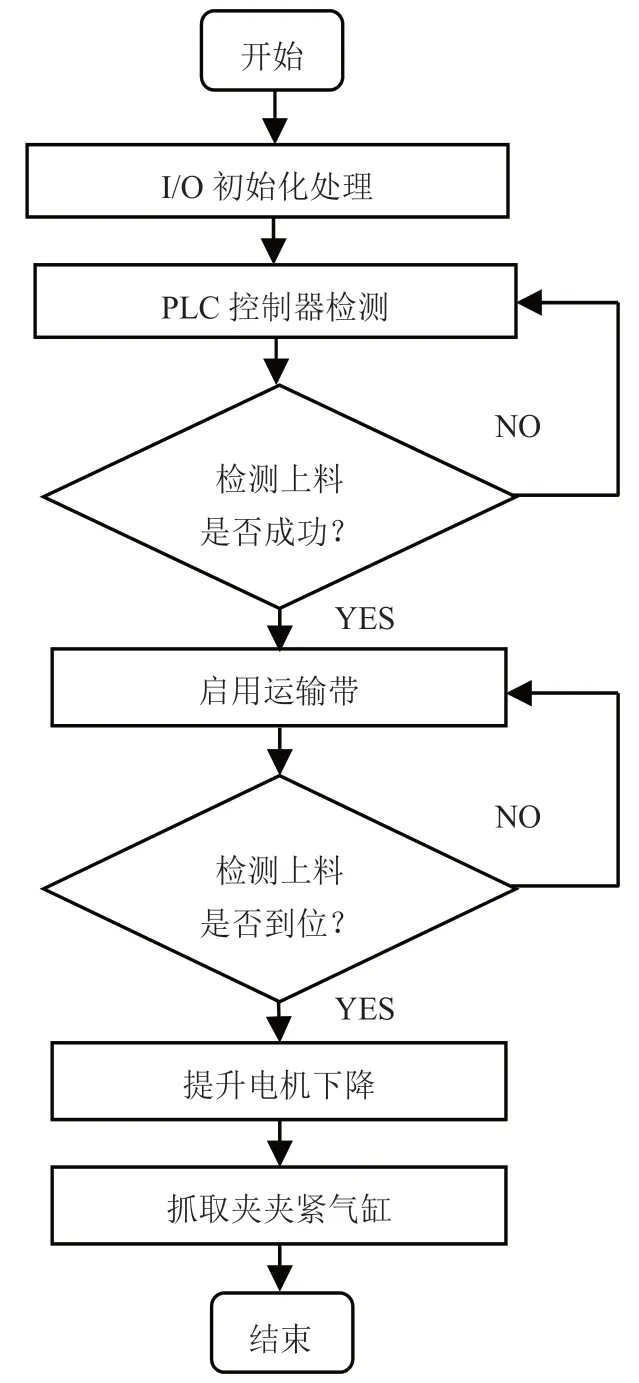
图3 PLC程序流程
3.2 系统应用效果
当全自动码垛机电气控制系统设计工作完成后,需要对该系统的有效性和可靠性进行验证。将该系统应用于某农场中,经过系统多次操作测试,发现应用全自动码垛机可自动码垛处理目标物料,同时,还能借助变频器,智能化控制码垛机平移机构的运行速度。经过测试验证,发现该系统具有响应速度快、抗干扰能力强等特点,完全满足实际应用需求。
4 结语
综上所述,将PLC 控制技术科学地应用于农业机械电气控制系统中,可以有效优化和完善农业机器人、全自动码垛机等机械的功能,提高这些电气控制系统的运行性能和效率,促进我国农业向自动化、智能化方向不断发展。相关人员在实际工作中,应实时关注和把握当前PLC 控制技术应用情况,并严格遵循科学合理原则,按照统一化应用标准,结合实际应用需求,不断地优化和完善农业机械电气控制系统设计方案,提高电气控制系统运行稳定性和可靠性。
猜你喜欢
快乐语文(2021年15期)2021-06-15
装备制造技术(2020年3期)2020-12-25
重型机械(2020年3期)2020-08-24
童话世界(2020年13期)2020-06-15
电子制作(2019年20期)2019-12-04
建材发展导向(2019年13期)2019-08-24
故事大王(2019年4期)2019-05-14
电子制作(2019年7期)2019-04-25
城市轨道交通(2019年2期)2019-04-04
照明工程学报(2016年3期)2016-06-01