老年人对自动驾驶汽车的接受行为意向研究
2024-02-23 01:38杨柳
汽车与驾驶维修(维修版) 2024年1期
杨柳
(武汉轻工大学土木工程与建筑学院,武汉 430023)
0 引言
自动驾驶汽车技术作为一项革命性的创新,为解决老年人出行中的挑战提供了新的可能性。老年人通常面临驾驶能力下降、身体机能减退以及出行便利性问题,而自动驾驶汽车被视为一种潜在的解决方案,有望为他们提供更安全、便捷和独立的出行方式。要挖掘自动驾驶汽车技术的潜力,最重要的是了解老年人对这一新兴技术的接受程度。因此,本研究建立了3个结构方程模型,分别为计划行为理论模型、技术接受模型和二者的联合模型,并将这3个模型进行对比,目的是为了调查老年人对自动驾驶汽车的接受程度,以便为未来的技术发展和政策制定提供关键见解。
1 研究现状
近年来,许多研究人员对接受自动驾驶汽车行为的意图进行了研究,主要涉及3个方面。
1.1 理论模型
理论模型涉及计划行为理论模型、技术接受模型、技术接受和使用的统一理论、创新扩散模型和因果模型,也有学者在上述理论基础上进行扩展。如WU等[1]对技术接受模型的框架进行了扩展,研究了态度、信任、感知有用性、感知易用性和感知舒适对行为意向的影响。在研究模型方面,很多学者最初从单个结构模型展开分析,后来对模型进行扩展,但是扩展的模型并没有和原模型进行对比分析。
1.2 影响因素
近年来的研究囊括了社会经济属性变量和心理潜变量。姚荣涵等[2]调查了受访者的社会经济属性、历史出行特性和行为态度特征,采用潜在类别分析人们选择共享自动驾驶汽车的潜在类别因素。景鹏等[3]从行人和用户的角度分析信任、态度、感知风险和感知有用性对自动驾驶汽车接受程度的影响。Manfreda等[4]的研究侧重于将技术采用、收入感知、安全性、效率和移动性问题作为使用自动驾驶汽车的主要因素,证实了自动驾驶汽车感知到的好处是使用的重要因素,感知到的安全性显著降低了使用自动驾驶车辆的意向。
因此在研究的影响因素方面,各学者主要考虑了社会经济属性和心理因素,提出了诸多影响因素,如年龄、性别、出行特性、安全、舒适性、吸引力、法律、道德标准、态度和信任等。但是,如此繁多的影响因素,究竟哪些是关键影响因素,没有统一定论。
1.3 研究对象
关于自动驾驶汽车接受度的研究对象分为3类:一般人群、车主和交通专家。随着研究的深入,研究对象逐渐细分,学者逐渐开始关注特殊群体对自动驾驶汽车接受意向,如残疾群体、老年群体等。
综合以上可知,大多数研究基于结构方程模型,并使用技术接受模型和计划行为理论等单一模型研究个人对自动驾驶汽车的接受程度。因此,本研究基于前人研究的基础,建立了扩展的计划行为理论,探索主观规范(Subjective Norm,SN)、态度(Attitude,ATT)、感知有用性(Perceived Usefulness,PU)、感知行为控制(Perceived Behavior Control,PBC)和感知易用性(Perceived Ease of Use,PEU)和这些关键因素如何影响老年人对自动驾驶汽车的选择。并且通过与标准的计划行为理论(Theory of Planned Behavior,TPB)和技术接受模型(Technology Acceptance Model,TAM)进行对比,来分析扩展的计划行为理论对老年人选择自动驾驶行为的解释力。根据研究结果,我们为政策制定者和企业管理者提供了自动驾驶汽车在老年群体中普及的建议。
2 理论框架及模型建立
2.1 计划行为理论(TPB)
Ajzen将心理行为理论用于模态选择研究中,在理性行为的基础上构思创立了计划行为理论模型。该模型假设个人可根据可用信息做出理性决定,认为个体的感知行为控制(PBC)、主观规范(SN)和行为态度(ATT)对行为意向(Behavior Intention,BI)具有直接影响,从而影响到个体的实际行为。分析标准的计划行为理论的各个构面对老年人接受自动驾驶意愿的影响程度以及模型的解释力,即考虑ATT、SN和PBC这3个影响因素(图1)。
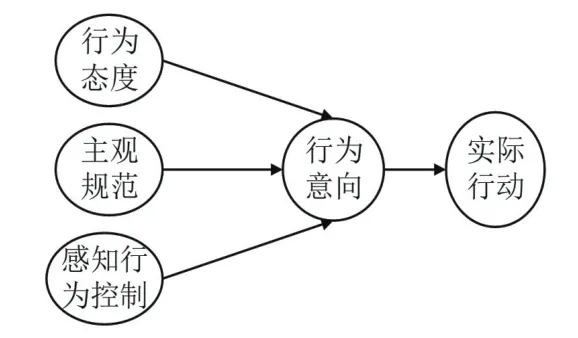
图1 计划行为理论框架
2.2 技术接受模型(TAM)
技术接受模型常用来检验技术的接受意向。当面对一项新技术时,人的行为意向取决于两方面,即感知有用性(PU)、感知易用性(PEU)。先前的研究已经证实,PEU和PU通过态度对行为意图产生影响,且感知PEU对PU有直接的影响[5]。用标准技术接受模型研究和分析影响老年人自动驾驶汽车接受度的因素以及模型的解释能力,即考虑PU、PEU和ATT这3个影响因素(图2)。

图2 技术接受模型概念图
2.3 联合模型
TAM和TPB的基本原理都是从理性行动理论(Theory of Reasoned Action,TRA)扩展而来的,结合TAM和TPB可以充分定义个人在使用新技术方面的行为。本研究提出了一个综合模型,考虑了TPB和TAM(图3),分析影响老年群体接受自动驾驶汽车的因素以及模型的解释能力。即考虑SN、ATT、PU、PBC和PEU这些关键因素如何影响老年人对自动驾驶汽车的选择。

图3 结构模型概念框架
3 问卷设计与及样本描述性统计
3.1 问卷设计与实施
本文中用于评估TAM和TPB的观察变量来自先前的研究。在文献综述的基础上,考虑到老年人的情况,编制了一份问卷。2022年5月至6月期间,在武汉对随机选择的老年人通勤者进行了预测试。根据50名通勤者试点样本的反馈,对调查问卷进行了修订,以提高清晰度和可靠性。问卷修订之后调查的观测变量如表1所示。根据之前的研究,使用Likert量表进行评估。
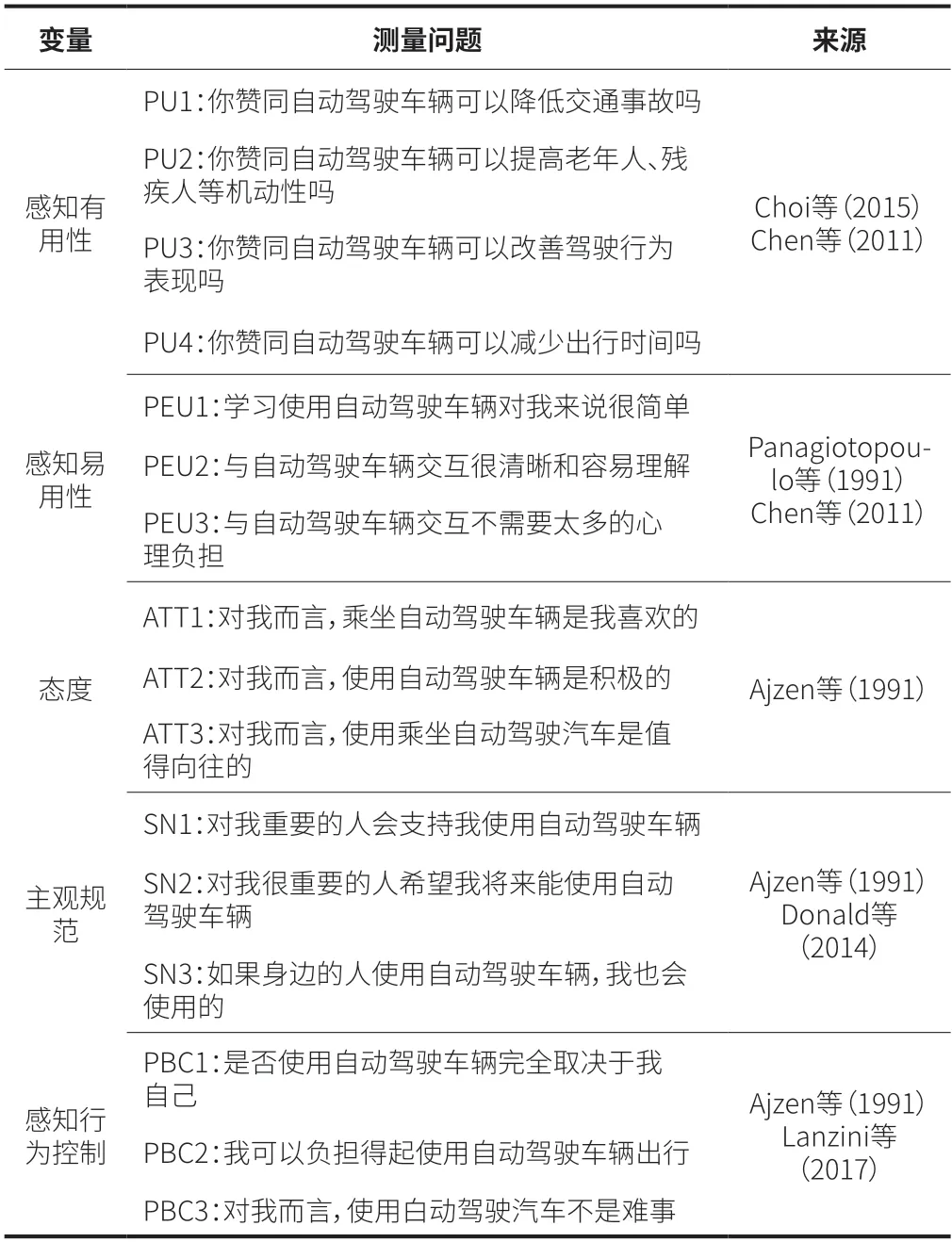
表1 老年人使用自动驾驶汽车的心理变量测量表
3.2 数据的描述性统计
本文通过微信、QQ和二维码分享等传播方式发放问卷。数据收集时间为2022年3—9月,采用线上问卷的形式,对全国各地区老年群体进行调查。由于调查的对象是老年人群体,因此在问卷调查过程中,对于部分老年人在填写问卷时面临的数字鸿沟问题,通过寻求子女或身边人帮助的办法完成。该调查收到有效问卷734份,统计结果如表2所示。
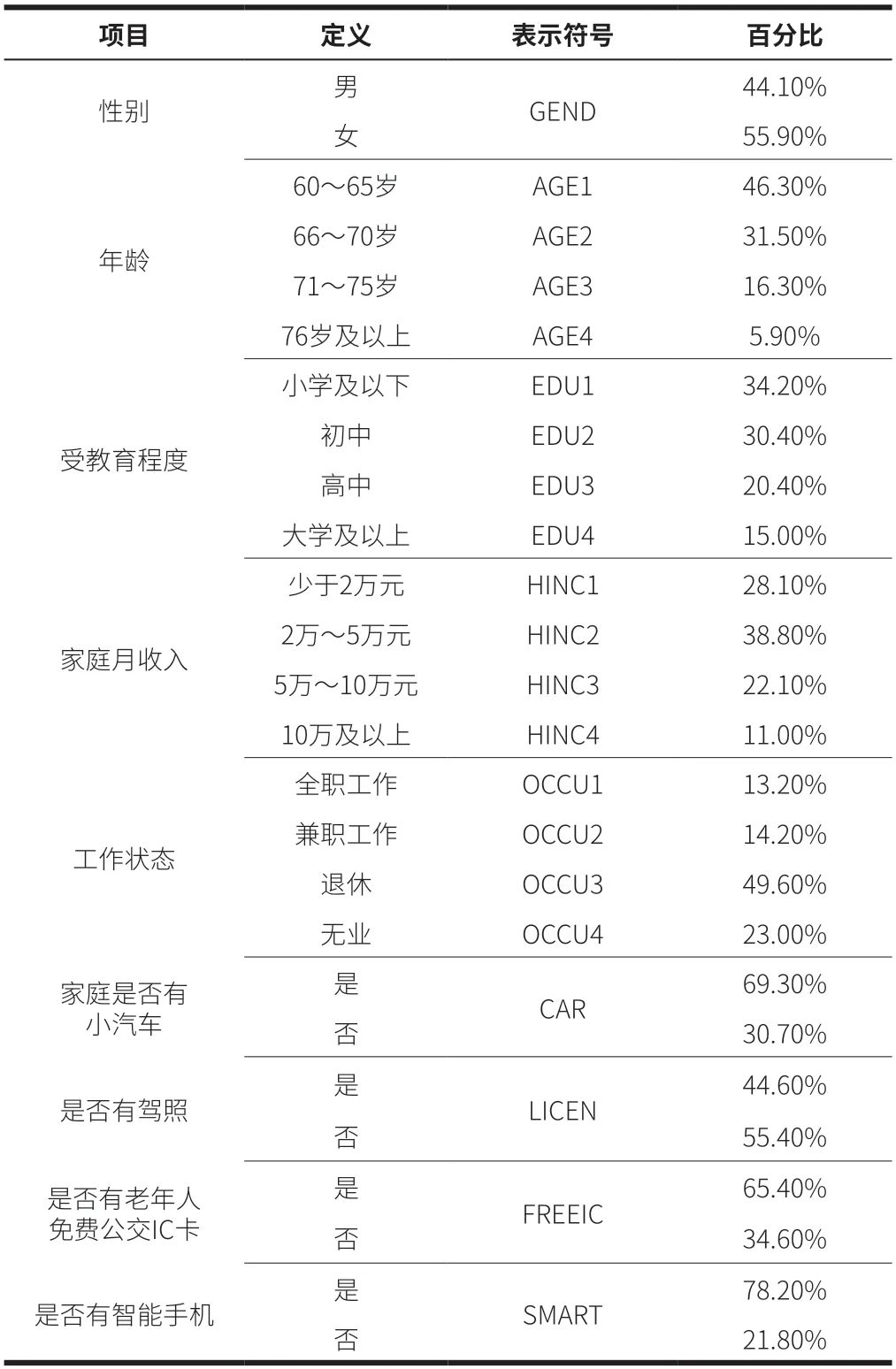
表2 样本基本特征描述性统计
3.3 问卷的信效度分析
问卷信度检验使用克隆巴赫系数(Cronbach’s )和组合信度来评价,效度使用平均方差提取值来评测。各潜变量的信度和效度结果如表3所示,可以看出,各潜变量的克隆巴赫系数范围在0.790~0.906,表示各个构面的信度令人满意。平均方差提取值在0.705~0.842,均高于建议值0.500。结果表明,选取的各个题项信效度符合标准。
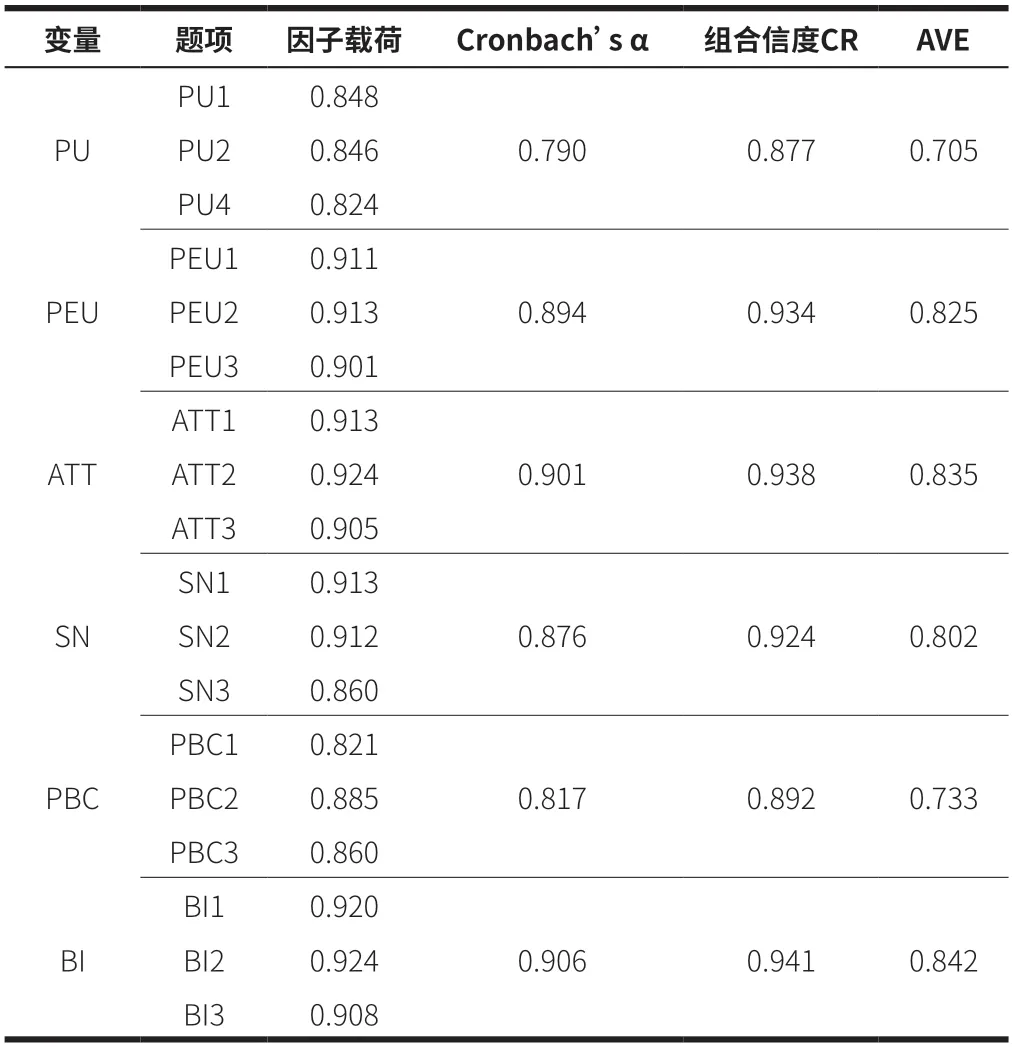
表3 潜变量的信度和效度检验
4 结果分析
计划行为理论的计算结果如表4所示。行为态度(β=0.520,p<0.001)、主观规范(β=0.453,p<0.001)、感知行为控制(β=0.436,p<0.001)对行为意向有明显的积极影响。并且,ATT对行为意向的解释能力比PBC更强。这与之前的研究一致,例如,Yuen等[6]研究表明个人对自动驾驶汽车的态度、主观规范和感知行为控制直接影响自动驾驶汽车的接受度。并根据累积效应的分析,表明态度对公众接受自动驾驶汽车的影响最大。
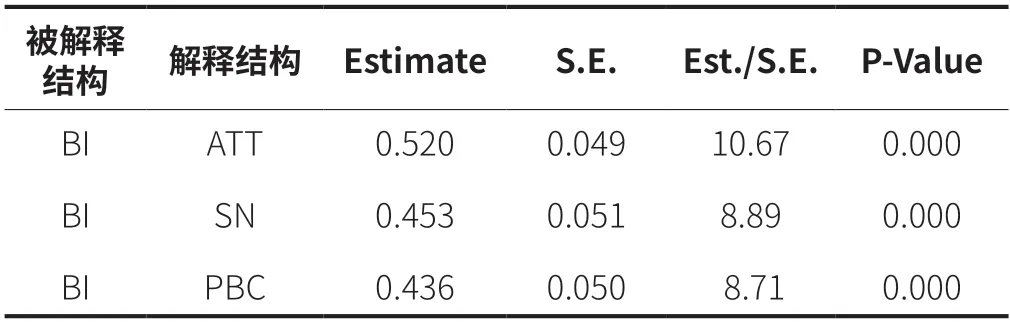
表4 标准TPB理论的结果
技术接受模型的计算结果如表5所示。行为态度(β=0.732,p<0.010)和感知有用性(β=0.164,p<0.050)对老年人接受自动驾驶有显著的积极影响。PU和PEU对ATT都有积极影响。这和大部分的研究结论一致,如Wu等的研究表明态度对行为意向有积极影响,而信任和感知有用性对态度同样也有积极影响。
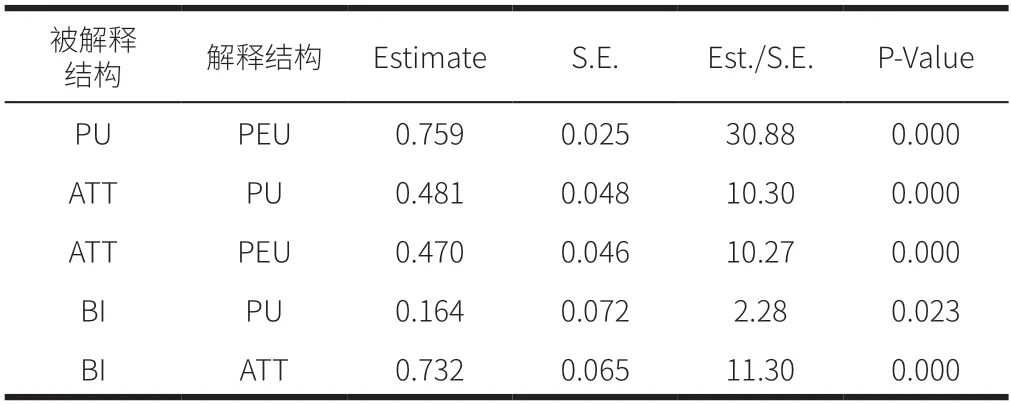
表5 标准TAM理论的结果
扩展计划行为理论的计算结果如表6所示。态度(β=0.489,p<0.010)、主观规范(β=0.384,p<0.010)和感知行为控制(β=0.384,p<0.010)对老年人接受自动驾驶汽车有着明显的影响,而感知有用性(β=0.149,p=0.058>0.010)对接受行为没有显著影响。这与部分学者研究结论不同,如景鹏从老年人使用者的角度分析表明,感知有用性和态度等都对使用意向有积极影响[3]。
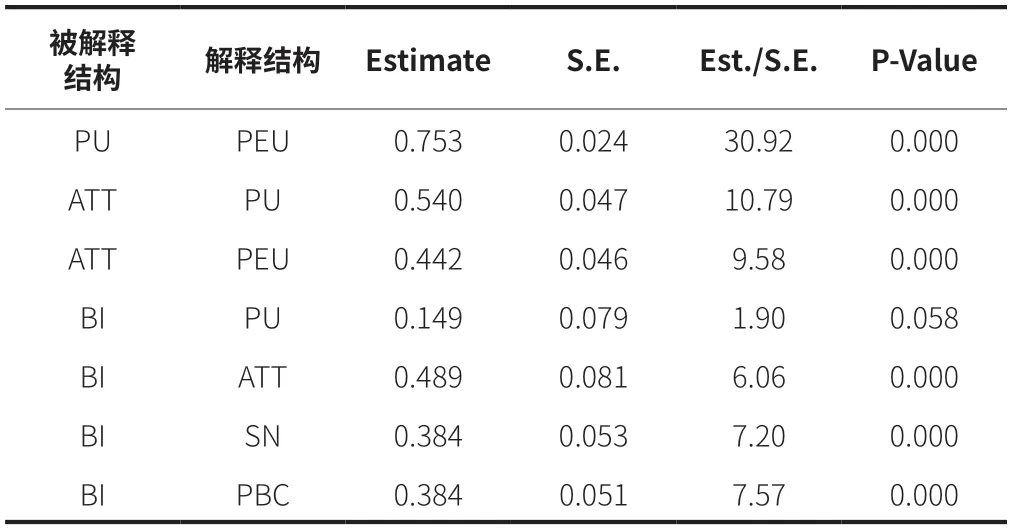
表6 扩展TPB理论的结果
此外,我们分析感知有用性、感知易用性和行为态度之间的关系。虽然感知有用性对行为意向的影响不显著,但是可以通过态度影响行为意向,感知易用性同样可以通过影响感知有用性和态度来影响行为意向。
5 结束语
本研究基于前人研究的基础建立了计划行为理论模型、技术接受模型和二者的联合模型等3个模型进行比较分析,深入研究老年人对自动驾驶汽车的接受程度,为提高自动驾驶汽车在老年人中的普及率,改善他们的运动、生活质量和身心健康提供了理论依据。与标准的TAM和TPB相比,扩展的计划行为理论在解释老年人对自动驾驶汽车接受意向方面具有更强的解释力。通过分析,得出TPB对TAM的构面的显著性存在影响。在标准的TAM中,感知有用性(PU)对行为意向有显著影响。但是加入TPB之后,感知有用性的影响变的不显著。结论如下。
5.1 理论解释力
在探讨模型的解释力方面,扩展的计划行为理论解释力最强(82.5%),其次是标准技术接受模型(81.9%),排在最后的是标准的计划行为理论(76.4%)。而扩展的计划行为理论和标准技术接受模型对行为意向的解释力相当。
5.2 影响因素
在扩展的计划行为理论中,行为态度(β=0.489,p<0.010)的影响最大,其次是主观规范(β=0.384,p<0.010)和感知行为控制(β=0.384,p<0.010),而感知有用性对老年人接受自动驾驶的影响并不显著。根据以上结果,可以通过对自动驾驶车辆的使用进行宣传的方式,促使接纳能力强的儿童、家人、朋友和邻居接受和使用自动驾驶汽车,以提高老年人接受自动驾驶汽车的意愿。
感知有用性(β=0.540,p<0.010)和感知易用性(β=0.442,p<0.010)对态度影响显著。因此,可以通过影响老人对自动驾驶的态度来促进其使用意愿。
影响个人态度的因素包括外部因素和内部因素。内部因素包括技能、能力和知识;外部因素包括时间、与他人合作和人际交流等。因此,可以为老年人提供适当的培训和教育,以提高他们对自动驾驶汽车和智能手机功能的认识,从而提高他们接受自动驾驶汽车的意愿。
猜你喜欢
猪业科学(2021年3期)2021-05-21
学生天地(2020年5期)2020-08-25
活力(2019年19期)2020-01-06
文苑(2018年20期)2018-11-09
文苑(2018年17期)2018-11-09
电子测试(2018年10期)2018-06-26
Coco薇(2017年8期)2017-08-03
中国修辞(2017年0期)2017-01-31
汽车博览(2016年9期)2016-10-18
新高考·英语进阶(高二高三)(2016年4期)2016-09-19