
基于改进轻量化YOLOv7 的变电站数显仪表检测
2024-02-21 04:06袁梓麒周博文易志雄
电子制作 2024年3期
袁梓麒,周博文,易志雄
(湖南科技大学 信息与电气工程学院,湖南湘潭,411100)
0 引言
变电站[1]主要起到电压电流的变换,接收电能以及对其进行调配的功能,是电网中重要的一环。变电站的安全平稳地运行,维系着人们生活以及各行各业的运转。变电站中拥有众多仪器,如变压器、避雷器等。一些仪表的数值会进行日常检测,当仪表数值发生突变时,预示着设备发生故障,严重可导致安全事故,造成人员以及财产的损失。
因此在变电站日常巡检过程中,仪表检测[2]占其中重要的一部分;目前仪表检测定位常使用特征点和模板匹配算法和支持向量机等方法。模板匹配是通过识别图像的主要特征进行对比最终来达到检测定位的功能。模板匹配的特性主要有算法简便、计算量小,在人脸识别、车牌识别、仪表识别多种场景下应用。在仪表检测方面,陈积光等人[3]使用两次模板匹配对仪表进行检测并且同时可以过滤周边的冗余信息,最终提高检测定位精度。但是精算精度不高是模板匹配方法的主要不足。David Lowe[4]在2004 年提出了一种关于局部的特征描述子SIFT。
然而传统目标检测算法虽然检测速度快,但是检测精度低,鲁棒性差。随着人工智能的发展,在目标检测方面的热度也急剧提升。基于深度学习的目标检测方法,由于其针对复杂环境的鲁棒性高,检测速度快等特点,已经被用于多方领域。目前常见的目标检测网络有 RCNN(Regionbased CNN)系列以及YOLO(You Only Look Once)[5]系列。RCNN[6]系列网络属于 Two-stage 类型,二阶段算法计算量大、操作冗余性高、实时性差,难以满足现实应用需要。与此同时,一种具有较快检测效率的YOLO(You Only Look Once)网络于2016 年由 Joseph Redmon[7]等人提出,该类网络属于单阶段网络,在获取目标物体类别与位置信息过程中,降低了算法的复杂度。针对工业环境下的数显仪表,YOLO-v7 在速度和精度方面都超过了所有已知的目标检测算法,但原始模型大小达到71.3MB,模型过大不易部署在移动端。本文将 YOLO-v7 目标检测网络应用于变电站的数显仪表检测,凭借 YOLO-v7 出色的检测速度以及检测精度,实现实时准确的对仪表进行定位检测,本文的主要贡献是改进的YOLOV7 算法在UFPR-AMR 数据集中优于其他算法,并在准确性和模型大小方面取得了良好的结果;AMR 的公共数据集包含2000 张完整和手动注释的图像,并且有一个明确定义的评估协议,允许用于此任务的不同方法之间的公平比较。
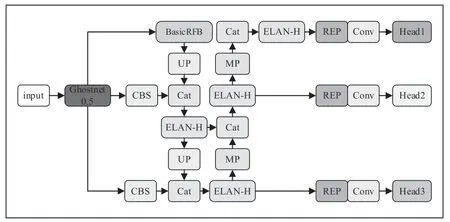
图1 改进后的YOLOv7 网络结构
1 检测方法
■1.1 YOLOv7 目标检测模型
YOLOv7[8]在2022 年由WANG 等提出,其结构由主干网络、特征融合网络和预测网络三部分组成,YOLO-v7 在速度和精度方面都超过了所有已知的目标检测算法,为实现工业条件下数显仪表的检测定位奠定了基础。
■1.2 模型改进方法
YOLOv7 在实际检测中,虽有高效准确度高的优点,但随着边缘计算技术的兴起,变电站等工业场景普遍开始使用车辆终端来部署边缘,在车辆终端上部署基于深度学习的目标检测算法存在困难,且效果不佳。因此,为了提高YOLOv7 在工业场景的实时检测速度,更容易部署在车辆终端,需要对其进行改进。
针对YOLOv7 算法较大的参数体量,以及工业场景实时检测的要求,GhostNet 模型主要针对移动设备设计,与其他模型相比,参数更小,计算复杂度更低。GhostNet 的模型尺寸只有MobileNetV3 的一半,但其精度和推理速度比MobileNetV3 高0.5%,本文介绍了GhostNet_0.5 轻量级网络结构作为YOLOv7 的骨干提取网络。
SPPFCSPC 模块是YOLO7 中的一个重要组成部分,它的作用是对输入的特征图进行多尺度的空间金字塔池化,从而提高模型的感受野和特征表达能力。由于 RFB 拥有轻便的结构、计算量少,可以很方便地与其他识别模型融合,因而本文提出了一种融合 YOLOv7 和RFB 的轻量化仪器识别模型,希望结合两者,在保证轻量化的同时,使得仪表检测精度显著提升。
1.2.1 GhostNet_0.5 网络
GhostNet[9]是华为诺亚方舟实验室在2020 年提出的轻量型网络结构,在计算性能上超越谷歌开发的MobileNetV3。针对特征图冗余问题,Ghost module 利用特征图的相似性,产生相同数量特征图,只需更少的计算量。因此Ghost module 被设计成一种分阶段的卷积计算模块,能够在少量计算得到的特征图基础上,只需一次线性卷积却能获取更多特征图,而新得到的特征图被命名为“ghost”,最后将两部分拼接在一起生成最终特征图,以此过滤特征图的冗余,取得更加轻量的模型,能够更好地提升检测精度。
GhostNet 可在不改变卷积的输出特征图尺寸和通道大小的前提下,降低整个模型的计算量和参数数量,并且适用于任意的卷积网络,因此,本文选用GhostNet_0.5 网络,整体网络结构如图2 所示。
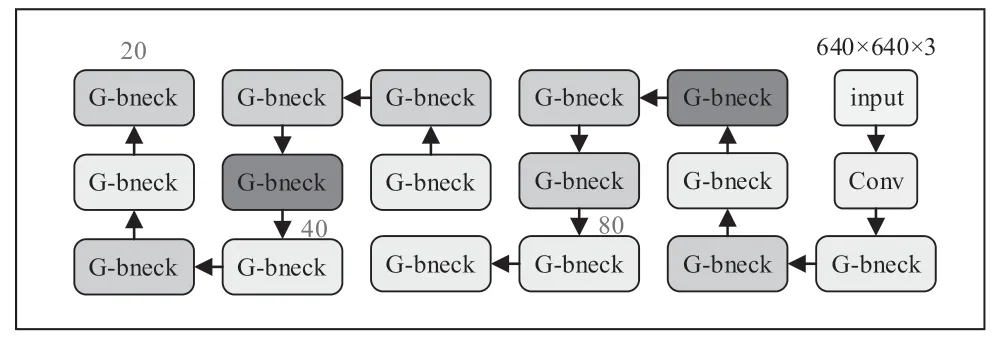
图2 GhostNet 整体网络结构
1.2.2 Receptive Field Block
在人类视觉皮层中,群体感受野(Population Receptive Field,PRF)的规模大小使用视网膜图中离心率函数表示,尽管存在差异在感受野之中,但离心率和群体感受野规模大小都呈正增长趋势。刘等人[10]受到人类感受野RF 的结构启发之后,提出 RFB(Receptive Field Block),加强轻量级CNN 模型对于深层特征提取能力,如图3 所示。
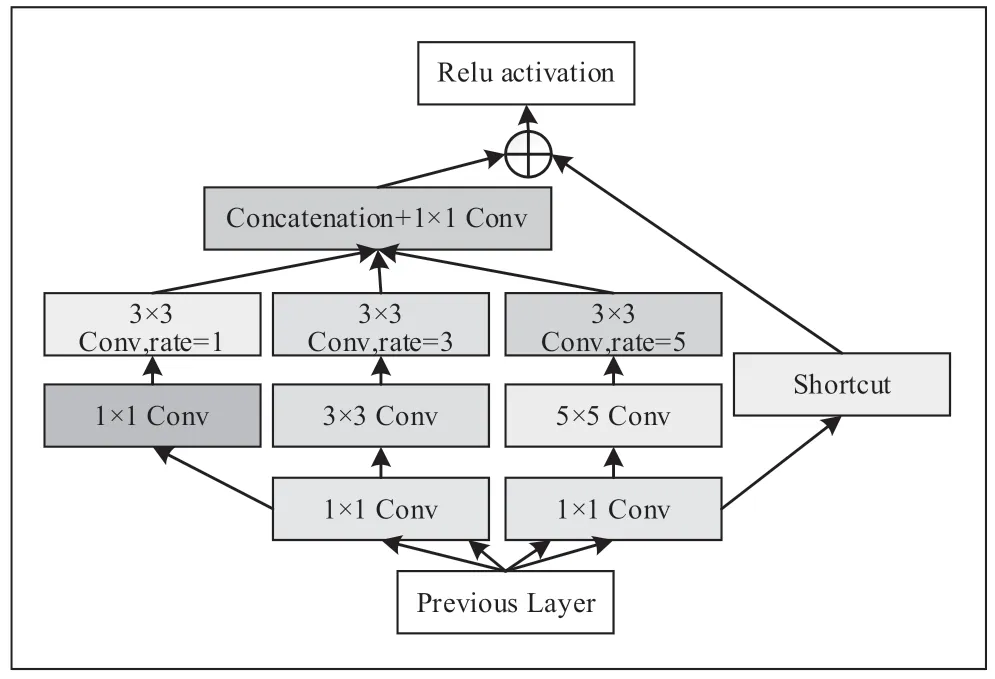
图3 Receptive Field Block 模块结构图
RFB 结 构,借 鉴Inception 结 构,1×1 的Conv 和Inception 一样,主要用于减少数据计算量和进行跨通道的信息融合,主要不同点在于引入3 个dilated 卷积层(比如3×3conv,rate=1),3×3 卷积层代替5×5 卷积层,并且用1×3 和3×1 卷积层代替3×3 卷积层,主要目的是数据减少计算量,提高检测速度,由于 RFB 轻便的结构、计算量少,可以很方便地与其他识别模型融合,因而本文为了提升仪表检测精度,提出了一种融合 YOLOv7 和RFB 的轻量化仪器识别模型,在保证轻量化情况下,达到高检测精度的要求。
2 实验与结果分析
■2.1 数据集与实验环境
实验数据为UFPR-AMR 数据集[11],其中含有4000 张电气数显仪表图片,其中训练集3000 张、验证集500 张、测试集500 张。实验条件为Python3.7.12,PyTorch1.8.0,显卡为RTX307Ti,迭代150 轮次完成训练。训练时将学习率设置为0.01,Batch-size 为8,使用SGD 优化器进行训练。
■2.2 消融实验
为保证消融实验的可信度,各网络模块在服务器端的同一实验环境下,采用相同的数据集进行训练,以YOLOv7为基础网络,训练次数相同,分别得到各自的权重模型。在进行测试时,选择相同的图像输入,分别对BasicRFB、GhostNet_0.5 结构进行消融实验。
在同一实验环境下,YOLOv7 基础网络训练的权重结果如图4 所示,选用GhostNet_0.5 网络作为主干网络模块的YOLOv7 网络训练的权重结果如图5 所示。如图6 所示,如用RFB 替换SPPCSPC 结构后的权重结果为0.994,图7 为同时在原网络基础上选用GhostNet_0.5 网络作为主干网络模块以及用RFB 替换SPPCSPC 结构以后的权重实验结果图,实验结果如表1 所示。
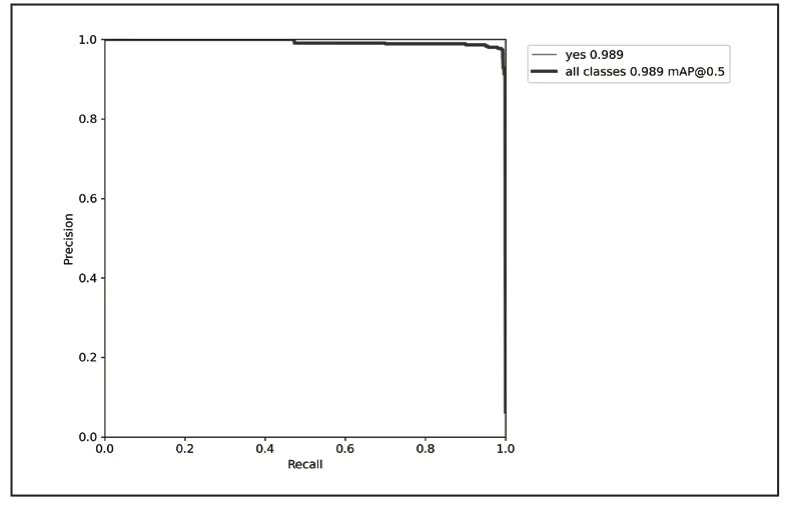
图4 YOLOv7 权重结果图
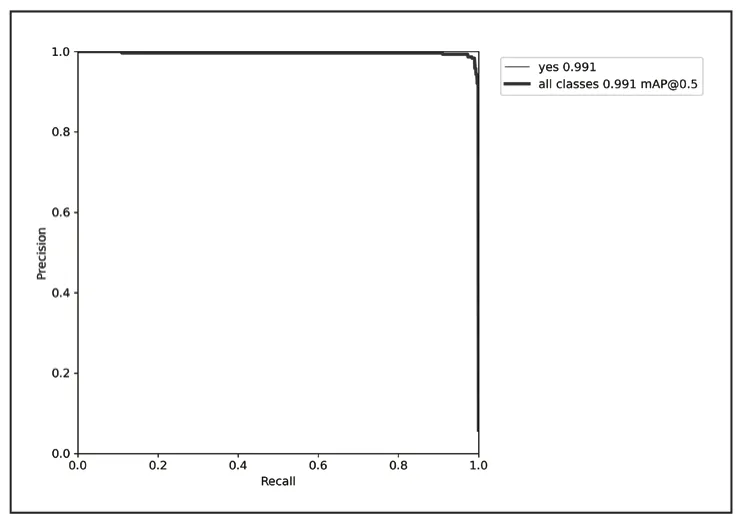
图5 改进 GhostNet_0.5 的权重结果图
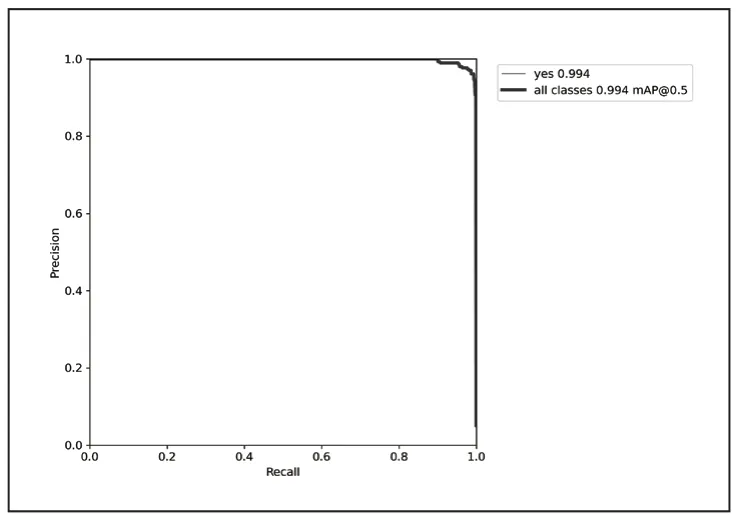
图6 改进BasicRFB 的权重结果图

图7 同时改进BasicRFB 和GhostNet_0.5 的权重结果图
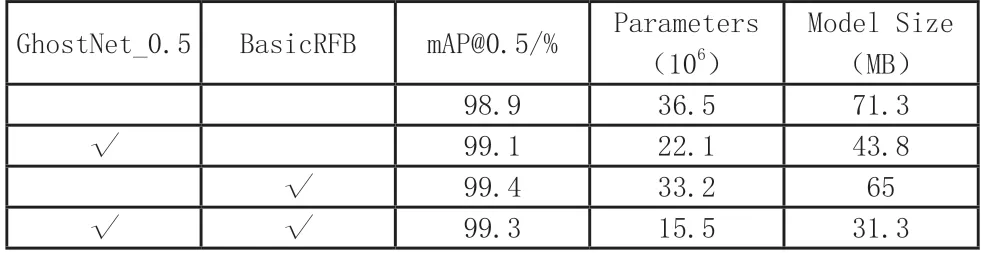
表1 基于改进YOLOv7算法的消融实验
通过选用GhostNet_0.5 网络作为主干网络模块,降低模型参数量并且压缩了模型大小,由表1 可得,选用GhostNet_0.5 网络的模型相较于YOLOv7 原模型,在模型大小减少了27.5MB,参数量减少了39.5%的情况下,mAP 还提升了0.2%,达到99.1%。通过单独使用RFB 模块替换RFB 替换SPPCSPC,改善了原网络SPPCSPC 结构造成的小目标信息丢失问题,提升了网络整体的特征信息提取能力,如用RFB 替换SPPCSPC 结构后与原网络相比,模型大小减少了6.3MB,参数量减少了8.7%,同时mAP提高了0.5%,达到99.4%的高精度。由表1 可以看出,在原网络基础上选用GhostNet_0.5 网络作为主干网络模块以及用RFB 替换SPPCSPC 结构相较于原网络,mAP 提升了0.4%,同时模型大小、参数量大大减少,分别降低了56%和57.5%,相较于单独选用GhostNet_0.5 网络,mAP 提高了0.2%,同时模型参数量以及模型大小都有减小。对比单独使用RFB 替换SPPCSPC 结构,在仅仅牺牲0.1%mAP的条件下,模型大小和参数量都降低了一半以上。
从表1 中可见,在服务器端相同实验条件下,同时添加两种模型之后,仪表检测定位效果更好。基于改进的YOLOv7 算法相比原算法而言,在模型被大大压缩的情况下,检测精度仍有较大提高,而且具有更小的计算量和参数体量,实验证明将其作为移动端部署的仪表定位检测算法更为合理,具有更优的性能。
■2.3 对比分析实验
为了验证本文提出算法的可靠性,将改进算法与YOLOv3、YOLOv5、YOLOv7 三种检测网络进行对比实验。为了保证对比实验的公正性,四种算法在服务器端同一实验环境下,使用相同数据集进行训练,均采用相同参数条件,迭代相同次数,利用PyTorch 深度学习框架,最终分别得到各自的实验结果如表2 所示。
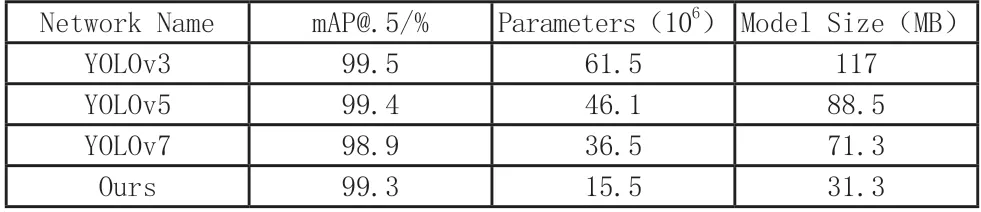
表2 不同算法之间精度以及模型大小对比
从表2 中的检测结果可知,本文改进算法mAP 相比原网络提高了0.4%,相比YOLOv3,网络模型大小压缩73.2%,参数量降低了74.7%,本算法主要对YOLOv7 模型中的主干网络与检测端部分进行分析。在YOLOv7 模型的基础上引入GhostNet 模块,通过将普通卷积分为逐点卷积与深度可分离卷积,将参数量进一步优化。为保持检测精度将SPPCSPC 替换为了RFB,在降低模型参数量的同时有效提升了检测精度。最后通过消融与对比实验,验证了改进方案的有效性。
表2 表明,在全部算法的识别结果表现上,本文提出的改进算法综合来说是最好的,其 mAP 为 99.3%,在精度相比原网络算法提高0.4%的前提条件下,同时模型大小、参数量大大减少,分别降低了56%和57.5%。改进算法相比YOLOv3 算法,仅仅牺牲0.2%精度的情况下网络模型大小压缩73.2%,参数量降低了74.7%。而YOLOv3、YOLOv5的精度高于YOLOv7 原网络的主要原因在于网络深度的加深,使模型拥有了更加准确的特征类别提取能力,所以改进YOLOv7 精度略低于其他两种算法。对于电气数显仪表检测定位的表现,本文提出的算法则明显较YOLOv7 和YOLOv3要好得多。
不同场景往往对算法检测性能影响较大,因此,为了验证算法稳定性,安排四种算法在相同实验条件下,在不同的场景下对算法检测效果进行测试,其效果图如图8 所示。

图8 不同算法在不同场景下的检测结果对比
从上述实验结果分析可得,在测试的四种算法中,YOLOv3 检测精度最高,漏检率以及错检率最低。而本文算法在检测精度与YOLOv3 相差不大的情况下,大大降低了计算量,减少了模型大小,方便部署于移动端,符合实际变电站巡检要求。通过图片1 检测效果图可知,本文算法完全可以达到实际工业环境下的检测要求,通过图片2 和图片3 对比分析可得,YOLOv7 原算法对数显仪表存在误检,而改进算法并无此问题出现,精度相比原算法得到提升。从上述实验结果可以看出,YOLO 算法在针对小目标,复杂环境下检测,都有一定局限性,而本文提出的改进算法在对比度低、光线暗等复杂环境下具有更好的稳定性。
实验结果表明,相较于 YOLOv5 和 YOLOv3 以及原YOLOv7 等主流算法,综合模型参数量、大小和mAP 来看,本文算法检测精度与检测效率更高,更加适合于部署在巡检机器人上,作为其仪器识别模型进行实时仪表检测定位。
3 结论
针对在实际工业生产环境下,当前通用检测模型算法参数体量大、检测定位精度低,同时巡检机器人上部署困难等问题,本文提出了一种基于改进的轻型YOLOV7 模型的数字显示仪检测方法,它解决了当前广义检测模型算法中大参数和现实工业生产环境中低检测精度的挑战。首先在YOLOv7 网络中引入GhostNet 作为主干网络,显著降低模型参数量并且压缩了模型大小。为了进一步提高模型检测精度以及速度,将SPPCSPC 替换为了RFB,在降低模型参数量的同时有效提升了检测精度。实验结果证明,本文算法相较于原YOLOv7 算法,模mAP 提升了0.4%,同时模型大小、参数量大大减少,分别降低了56%和57.5%,同时检测精度mAP 从原来的98.9%提高达到了99.3%,有效验证了本文算法的有效性。但是该算法仍有不足之处,在部署于移动机器人方面,使得算法模型更轻量化,容易部署在移动巡检机器人上,提高变电站数字仪表识别的实时性和准确度,还有很大改进空间。本文主要改进了模型大小,在算法精度方面还有改进空间,希望在之后的研究过程中,可以使得精度更高,更加适用于实际工业环境下的变电站仪表检测。
猜你喜欢
建筑与预算(2023年2期)2023-03-10
建筑与预算(2022年5期)2022-06-09
建筑与预算(2022年2期)2022-03-08
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年11期)2019-07-04
电子制作(2018年8期)2018-06-26
北京航空航天大学学报(2018年1期)2018-04-20
电子制作(2017年8期)2017-06-05
现代工业经济和信息化(2016年5期)2016-05-17
河南电力(2015年5期)2015-06-08
