基于混合控制策略的智能汽车路径跟踪控制研究
2024-02-20 11:12:46张洋瑞
汽车文摘 2024年2期
张洋瑞
(重庆交通大学机电与车辆工程学院,重庆 400074)
0 引言
智能汽车技术的发展为交通拥堵、交通安全和能源供给压力等问题提供了一个解决方案[1]。智能驾驶车辆将环境感知、决策、规划和运动控制集成一体,是近年来车辆领域的研究热点[2]。其中,车辆的运动控制是实现智能驾驶的关键因素和难点,包括横向路径跟踪控制和纵向速度跟踪控制[3]。路径跟踪控制指车辆横向运动对期望路径跟踪,需要有较好的时效性、鲁棒性等。现有车辆路径跟踪控制方法中,常用的有比例积分微分(Proportional Integral Derivative,PID)控制[4]、滑模控制[5]、模糊控制[6]、模型预测控制[7]和线性二次最优控制。PID控制在工程上应用广泛,无需建立数学模型,通过调参就能呈现较好效果,但是参数确定需要大量时间。滑模控制也是常用的非线性控制方法且有较好的适应性,但滑模控制带来的抖振和滑模面设计均对车辆控制影响较大。模型预测控制需要建立准确的系统模型,计算时需考虑到车辆动力学约束、控制器精度,但计算时间长,实时性变差。Zhao等[8]以线性二次型(Linear Quadratic Regulator,LQR)最优控制理论设计了智能汽车横向运动控制器,引入前馈控制器消除车辆横向误差,但未对控制器参数设定做准确描述。Meng等[9]根据车辆误差模型提出了基于人工经验的参数调整路径跟踪控制算法,但文中控制器参数的自适应设计欠缺理论支持。高琳琳等[10]基于车辆误差动力学模型,设计路径跟踪控制器,采用遗传算法(Genetic Algorithm,GA)优化控制器参数,提高车辆的路径跟踪能力。
针对单一控制策略在不同车速工况下不能兼顾跟踪精度和实时性问题,本文将LQR路径跟踪控制算法和GA 结合,旨在寻找路径跟踪控制器的最优参数。基于车辆路径跟踪误差动力学模型,建立以车辆横向误差、航向误差和输出前轮转角为优化目标的GA-LQR 路径跟踪控制器,从而提高车辆的路径跟踪能力。在纵向控制上,采用传统PID 速度跟踪控制器计算电机转矩,保证车辆纵向上的速度跟踪。最后通过MATLAB/Simulink 工具与CarSim联合仿真,验证设计控制器的有效性。
1 车辆路径误差模型
1.1 二自由度车辆模型
为提高车辆路径跟踪准确性并简化车辆模型,建立包含侧向运动和横摆运动的单轨线性二自由度车辆模型,如图1所示。其中车辆模型后轮不进行转向,且忽略悬架作用对车辆的影响。
图1 中,vx、vy分别为车辆纵向和侧向速度,Ff、Fr分别为车辆前轴和后轴的轮胎侧向力。a、b分别为车辆质心到前轴和后轴的距离,取a=1.015 m,b=1.895 m。δf、δr分别为车辆的前轮转角和后轮转角,β为车辆质心侧偏角,αr为前轮侧偏角,αf为后轮侧偏角,ωr为车辆横摆角速度。
根据牛顿第二定律建立车辆的运动微分方程:
式中,车辆的转动惯量Iz=1536.7 kN·m2,车辆质量m=1412 kg,车辆前轮侧偏刚度Kf=-145000 kN·rad-1,后轮侧偏刚度Kr=-84400 kN·rad-1。
1.2 车辆路径跟踪误差动力学模型
在车辆路径跟踪控制中,跟踪误差模型是常用的车辆运动模型之一。将大地坐标下车辆的坐标点投影到自然坐标系下,建立以车辆横向误差和航向误差为状态变量的误差动力学模型[11],如图2所示。

图2 车辆动力学误差模型
图2 中,S为沿参考路径的弧长,θ为车辆的航向角,θr为参考路径上车辆投影点H的航向角,即期望航向角,考虑车辆的质心侧偏角较小,将车辆的航向角θ用横摆角φ替换,ėφ为车辆航向偏差,指车辆实际横摆角与期望航向角之间的差值,ed为横向距离偏差,即车辆质心位置到期望路径上的最短直线距离,表示为:
式中,x、y分别为车辆横向、纵向坐标;xr、yr分别为参考路径的横向、纵向坐标。假设车辆以恒定车速行驶,且转弯半径R较大,车辆航向角的变化率和车辆加速度的理论值为:
式中,R为车辆转弯半径。
航向误差和横向误差率的计算如下:
在常规道路行驶状态下,车辆的航向角速度变化幅度较小,可忽略的影响,将式(4)代入式(1)求得,并列出车辆状态量的状态空间方程形式:
式中,A为状态变量系数矩阵,B为控制变量系数矩阵,状态量,控制变量u=δf,
2 车辆横、纵向控制器设计
2.1 车辆横、纵向控制器框架
车辆横、纵向控制流程如图3所示,车辆横向控制采用带预瞄的GA_LQR 路径跟踪控制器。将参考路径信息输入到车辆误差模型,得到err,通过遗传算法优化LQR控制器的Q、R矩阵参数,最后计算车辆前轮转角,输入到车辆模型,使车辆跟踪上期望路径。
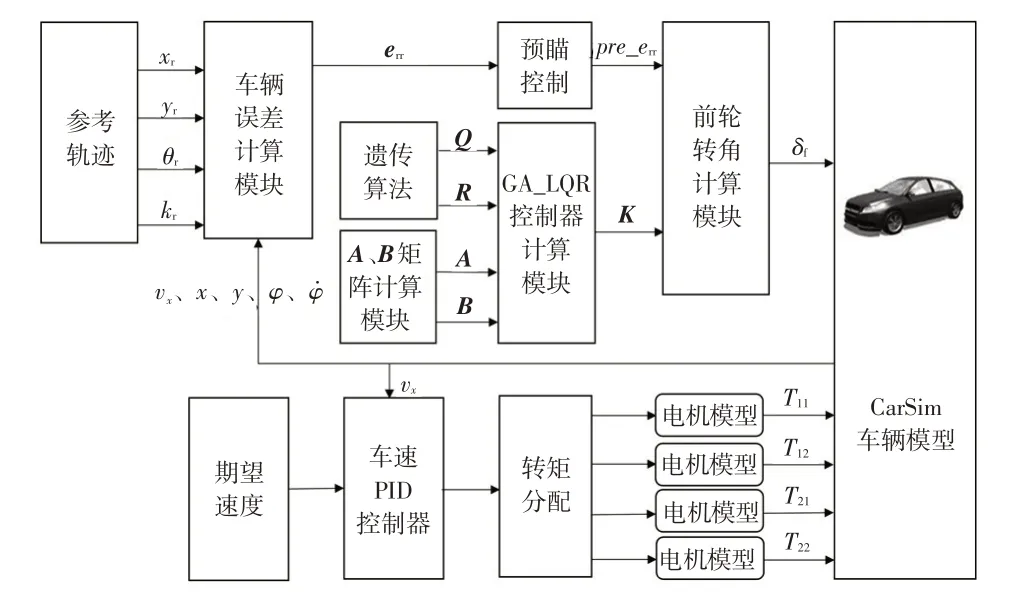
图3 车辆横、纵向控制流程
车辆纵向控制采用PID 速度跟踪控制器跟踪期望车速。将车辆期望速度与实际速度的差值作为信号输入到PID 控制器中,计算跟踪上理想速度所需的驱动转矩,再将驱动转矩分配到电机模型,最后由电机模型输入到车辆模型。
2.2 车辆纵向控制器
为保证车辆始终跟踪期望车速,不受外界因素和其他控制系统的影响,根据PID 原理,设计纵向车速控制器。PID车速控制器的控制率为:
式中,ev为理想车速与实际车速的偏差值,Tpid车速控制器输出的电机转矩。Kp、Ki、Kd分别为PID控制器参数的比例项、积分项和微分项。
PID速度跟踪控制器求得的电机转矩Tpid,采用平均分配的方式分配到4个电机模型上:
式中,T11、T12、T21、T22为4个电机的转矩输出值。
将CarSim 车辆传统的动力系统替换成电机系统模型,电机模型为简化的2阶传递函数:
式中,Td*为控制器得到的目标转矩,Td为轮毂电机输出转矩,ζ为电机系统时间常数,s为传递函数值。
2.3 车辆横向控制器的设计
LQR[12]广泛应用于被控对象为状态空间方程的模型,根据车辆误差动力学模型设计路径跟踪控制器,性能指标J为:
式中,Q为车辆误差权重矩阵,R为控制量权重矩阵。
为求得性能指标函数J的最小值,利用变分法求解二次型最优问题:
对哈密尔顿函数H进行求导,在值为0 处解得控制器的最优控制信号为:
式中,P(t)通过求解以下黎卡提方程得出:
LQR控制器最优控制率反馈矩阵为K=R-1BTP,计算得出的最优前轮转角控制规律为:
式中,K=[]K1,K2,K3,K4,A、B值仅与整车参数有关。
2.4 路径跟踪控制预瞄点的设计
智能汽车在低速行驶状态下呈现出较好路径跟踪效果,但车速较快时,由于车辆响应时间较短,车辆稳定性较差。在横向路径跟踪控制的基础上加入预瞄时间,使车辆能预先对路径变化进行判断,减少因控制时间短导致的前轮转角计算值较大问题和抖动现象。车辆路径跟踪预瞄设计如图4所示,其中,φpre为预瞄点的横摆角,Δt为预瞄时间,Δvx和Δvy分别为Δt时间内增加的横向速度和纵向速度。
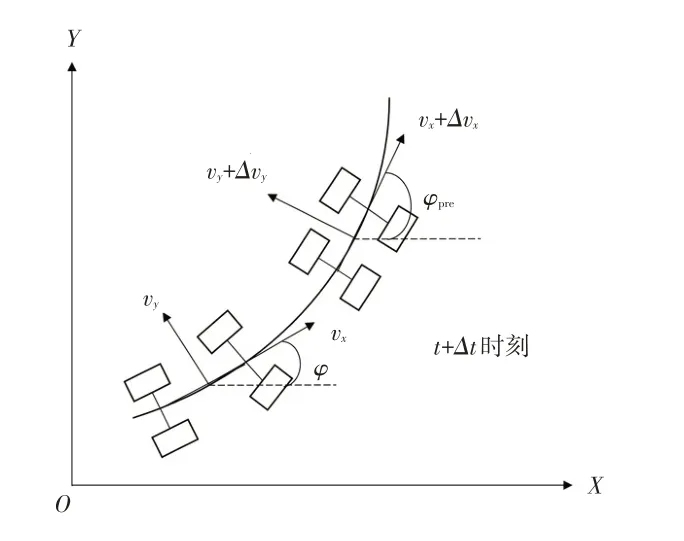
图4 车辆路径跟踪预瞄
预瞄时间并非固定值,随着速度的提高,预瞄时间需相应增大。预瞄控制通过预测路径,将路径信息输入到期望的离散路径点中,获得车辆的预瞄路径信息:
式中,xpre和ypre分别代表预瞄点的横、纵坐标值。
2.5 遗传算法
LQR 路径跟踪控制器的效果与Q和R加权矩阵相关,较大的Q值能够提高车辆路径跟踪精度,较大的R值能够减小控制量的输入。Q和R一般由人工经验调整和试凑,耗时长且无理论支持。针对这一问题,通过遗传算法优化出路径跟踪效果最好的控制器加权矩阵值Q和R。
遗传算法[13]优化的过程通常包括初始化、编码、适应度函数计算、选择、交叉、变异和终止条件判断,最终生成符合优化目标的结果,优化过程如图5所示。
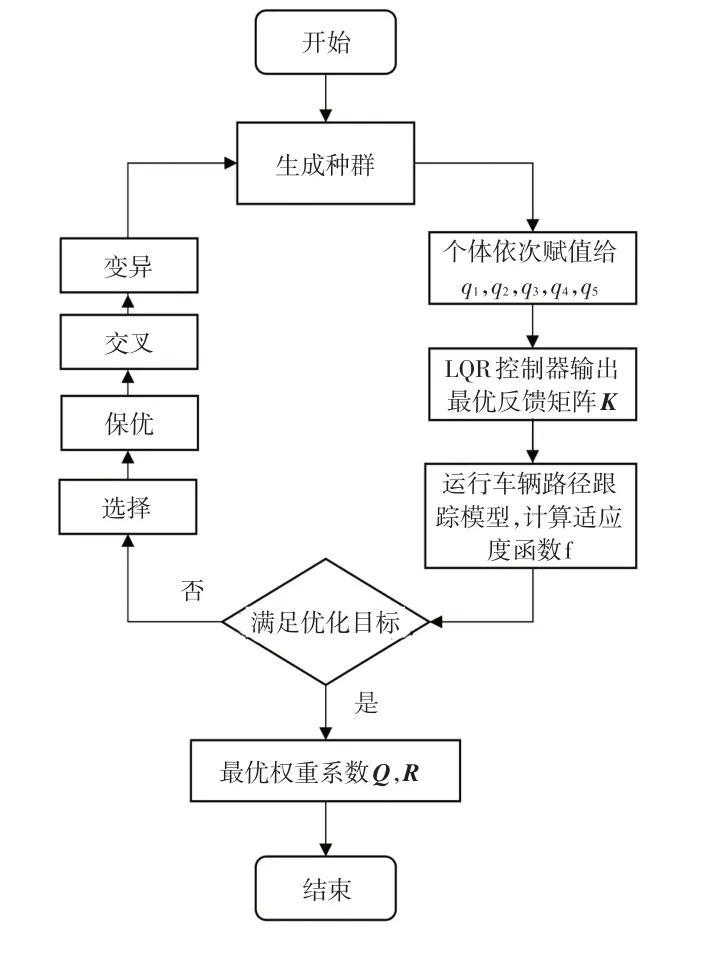
图5 遗传算法的流程
遗传算法将在约束条件下随机生成初始种群。将群体中的每个个体q1~q5分配给Q、R权重矩阵。控制器计算最优反馈增益矩阵K,输出车辆的前轮转角,运行路径跟踪模型得到适应度值。当适应度值满足遗传算法的终止条件时退出。否则,继续进行基因操作:选择、交叉和变异,以产生新一代种群并重复。求解最优的Q和R参数,遗传算法的参数设置如表1所示。
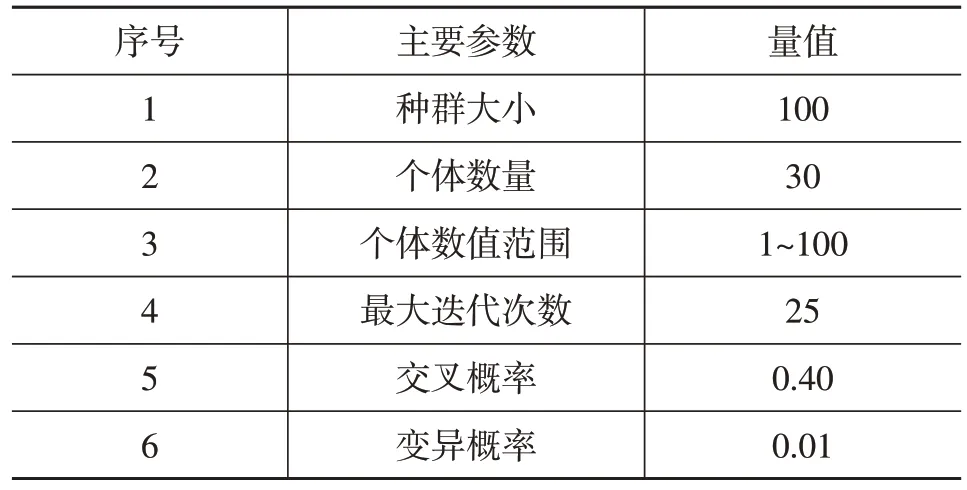
表1 遗传算法参数设置
遗传算法设计的目标函数需满足横向误差和航向误差尽可能小、控制的能耗要求相对较小(前轮转角较小)的条件。因此适应度函数J[14]为:
式中,Δed、Δeφ、Δδf分别为车辆的横向误差、航向误差和前轮转角的均方根值;ω1、ω2、ω3分别为Δed、Δeφ、Δδf占比适应度函数的权重系数,权重系数越大说明对控制重视度越高。
遗传算法的适应度值图像如图6所示。

图6 遗传算法适应度值
遗传算法的适应度值逐渐从18.93 下降到3.77,遗传代数到25代后结束优化,此时适应度值最小,设计的Q和R矩阵初始参数为:Q=diag[1,1,1,1]和R=80。遗传优化后的权重矩阵为Q=diag[19.21,1.22,55.50,1.01]和R=99.40。
3 道路仿真分析
3.1 双移线路径跟踪仿真分析
为验证车辆横纵向跟踪控制器系统的有效性,搭建MATLAB/Simulink 与CarSim进行联合仿真,采用常见的双移线工况。双移线道路的参考航向角以及道路曲率的计算公式如下:
式中,kr为参考路径曲率。
双移线道路的参考路径曲率kr和参考航向角θr如图7、图8所示:

图7 道路曲率参考值
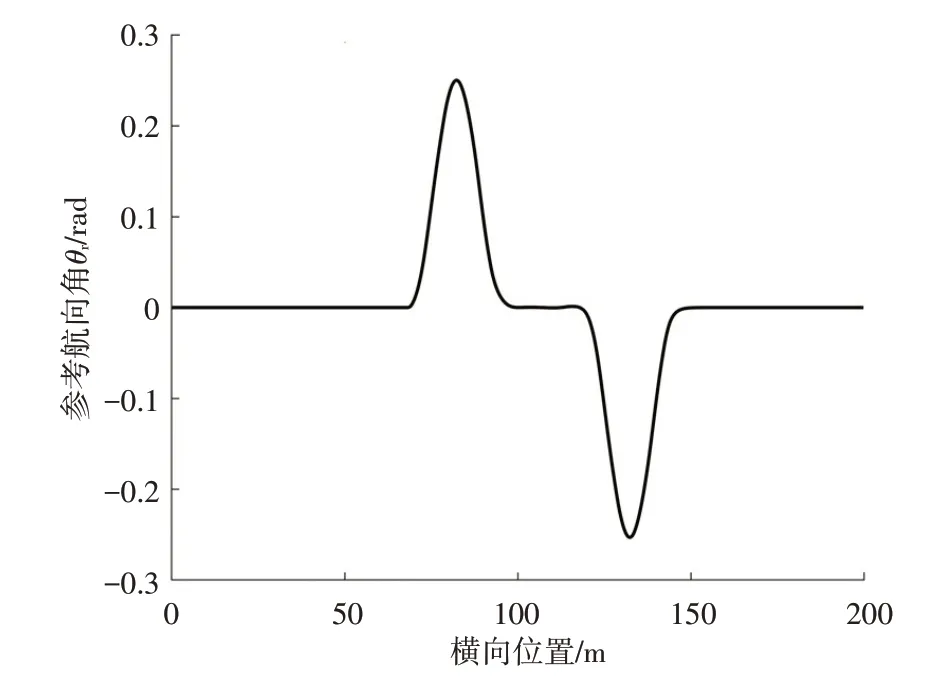
图8 道路航向角参考值
在车速为60 km/h 的双移线工况下,分别对控制器优化前和控制器参数遗传算法优化后进行双移线的路径跟踪仿真验证,仿真结果如图9~图12所示。
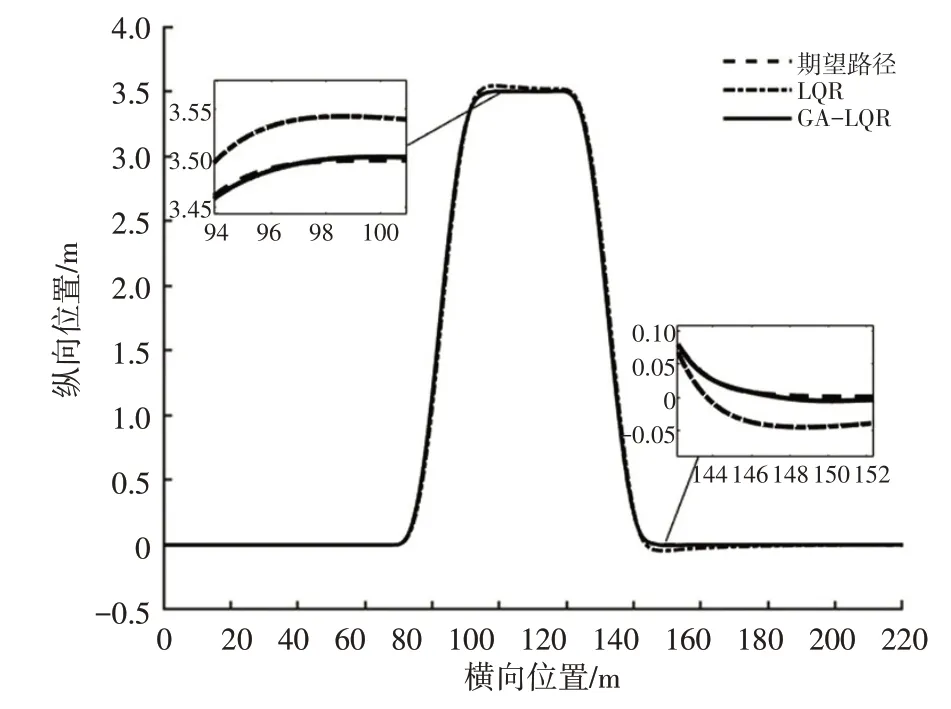
图9 优化前后路径跟踪对比
在双移线工况下,权重系数优化前后的车辆路径如图9所示,当横向位置分别为95 m和145 m时,相比于LQR车辆路径,优化后的GA_LQR控制车辆路径更趋近期望路径。通过图10、图11 分析得出,GA_LQR控制车辆的横向误差峰值控制在0.0105 m,航向误差峰值控制在0.048 rad。相比于固定权重LQR 控制,GA_LQR 控制车辆的横向误差和航向误差峰值分别减小了86.6%和17.7%。由于在遗传算法优化时,将横向误差、航向误差和前轮转角均考虑在优化目标中,且横向误差占比权重最大,优化后的GA_LQR控制器提高了车辆横向和航向的跟踪能力。图12 为计算的车辆前轮转角,优化前后的权重矩阵R接近且较大,车辆以较小的前轮转角进行路径跟踪,保证车辆路径跟踪的行驶稳定性。双移线路径跟踪的评价指标如表2所示。

表2 双移线路径跟踪的评价指标

图10 优化前后横向误差对比
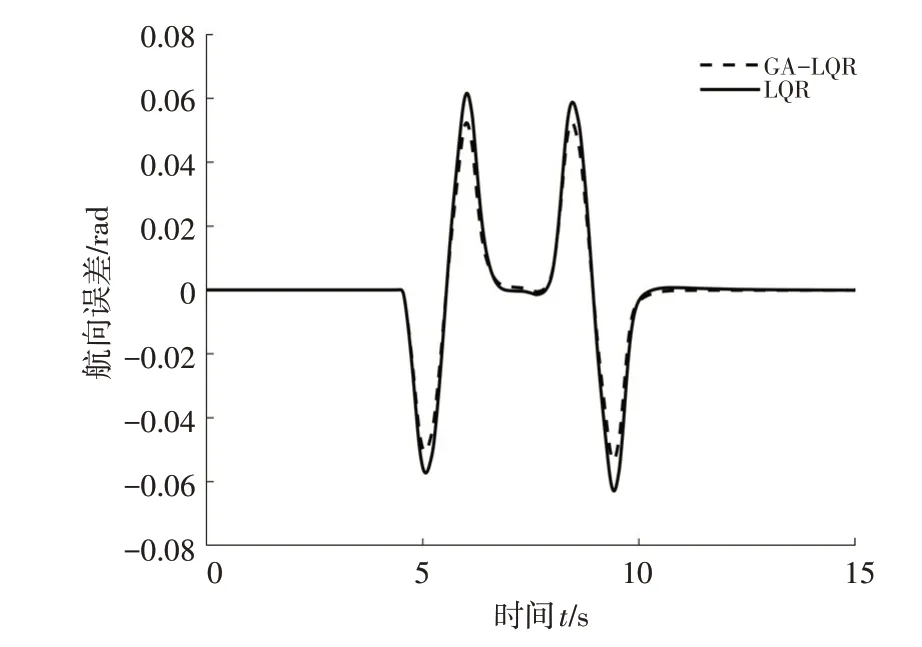
图11 优化前后航向误差对比
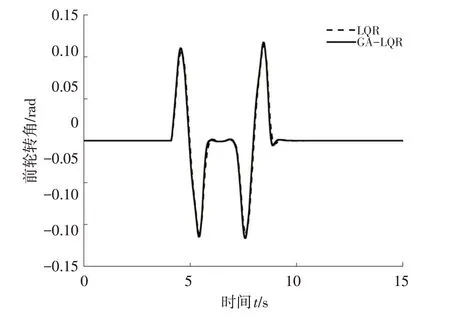
图12 车辆前轮转角
3.2 连续换道路径跟踪仿真分析
在车辆进行连续换道仿真测试时,连续换道的道路方程为:
式中,c为换道的横向位移,d为换道的纵向位移。
在车速为90 km/h的连续换道工况下,分别对优化前和优化后的LQR控制器进行车辆路径跟踪仿真验证。
采用同样遗传操作,优化前的Q和R权重矩阵为Q=diag[1,1,1,1],R=80。优化后的权重矩阵为Q=diag[99.47,1.34,77.26,1.06],R=80.13。优化对比结果如图13~图16所示。

图13 优化前后路径跟踪对比
在连续换道工况下,权重系数优化前后的车辆路径如图13所示,LQR和GA_LQR控制均能够跟踪上期望路径,但在横向位置分别为23 m和100 m处均能看出,GA_LQR 控制优化后的车辆路径更加贴合期望路径。从图14、图15 可以看出,GA_LQR 车辆横向误差峰值控制在0.0177 rad,航向误差峰值控制在0.0088 rad。相比于固定权重系数的LQR 车辆,遗传算法优化权重系数的GA_LQR 车辆横向误差和航向误差峰值分别减小84.2%和14.6%,优化后控制器提高了车辆在连续换道工况下的横向路径跟踪和航向角跟踪能力。图16 为车辆跟踪连续换道路径计算的车辆前轮转角,车辆前轮转角均在较小的范围,保证了车辆在路径跟踪时的行驶稳定性。连续换道路径跟踪的评价指标如表3。

表3 连续换道路径跟踪的评价指标

图14 优化前后横向误差对比

图15 优化前后航向误差对比

图16 车辆前轮转角
3.3 不同车速下路径跟踪仿真分析
为验证车辆纵向速度跟踪控制器和横向路径跟踪GA_LQR控制器的鲁棒性。车辆在不同速度下,车辆速度误差、横向误差和航向误差都应较小。分别在车速为36 km/h、72 km/h、108 km/h 下,进行车辆双移线工况速度跟踪与路径跟踪仿真,仿真结果如图17~图20。
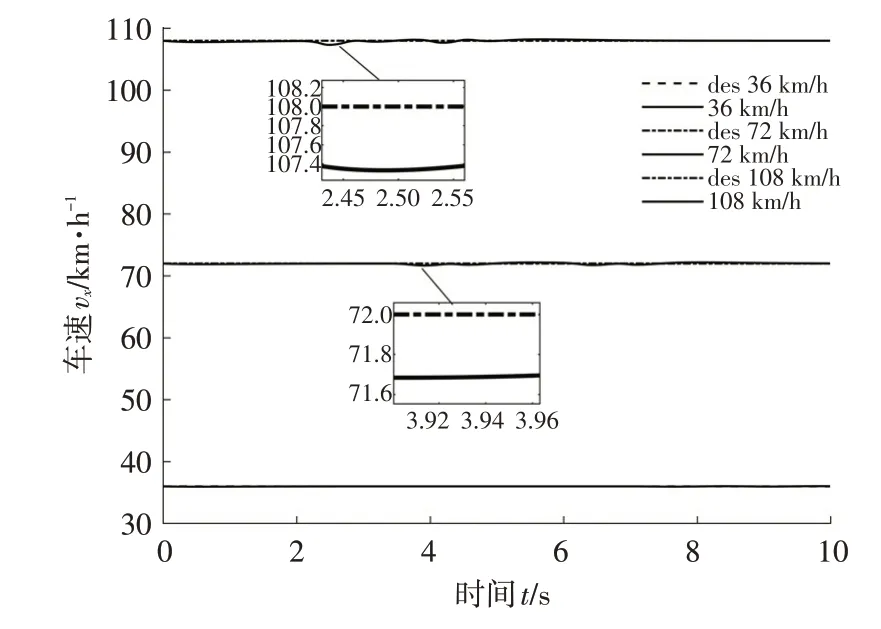
图17 纵向速度跟踪
由图17可看出,车辆纵向设计的PID速度跟踪控制器,在低速、中速、高速下均能较好跟踪上车辆期望速度,且速度误差的最大值不超过1 km/h,验证了纵向速度控制器在不同速度下均具有较好的速度跟踪能力。
试验结果标明,在车辆低速行驶状态下,GA_LQR路径跟踪控制器展现出良好的跟踪性能;在中速和高速行驶状态下,由于车辆换道速度较快,为确保车辆能够有效地跟踪上期望路径,有必要在路径跟踪控制器中引入预瞄控制机制。在车辆以72 km/h和108 km/h行驶状态下,设定预瞄时间分别为0.2 s 和0.4 s,可以确保车辆对路径变化提前做出判断。从图18 的车辆路径图中可知,在车辆加入预瞄的GA_LQR 控制后,车辆在低速、中速和高速行驶状态下均能够很好地跟踪期望路径。从车辆横向误差图19 中看出,在不同速度的双移线路径跟踪仿真工况下,车辆的横向误差均在一个较小范围内,且随着车速的提高,车辆的横向误差增大,当车速为108 km/h 时,车辆横向误差达到峰值0.4 m,此时车辆仍能保持较好的路径跟踪能力。从车辆的航向误差图20 中看出,在车速为108 km/h时车辆的航向误差达到峰值0.07 rad,车辆速度在36 km/h、72 km/h、108 km/h 时,航向误差均保持在较小的范围,验证了车辆在不同速度下的横向路径和航向角跟踪能力,说明设计的车辆横纵向控制器在不同速度下均有较好的鲁棒性。
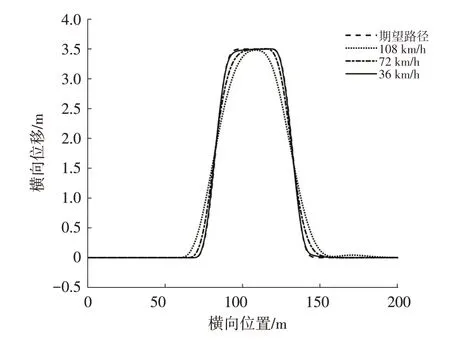
图18 不同速度路径跟踪
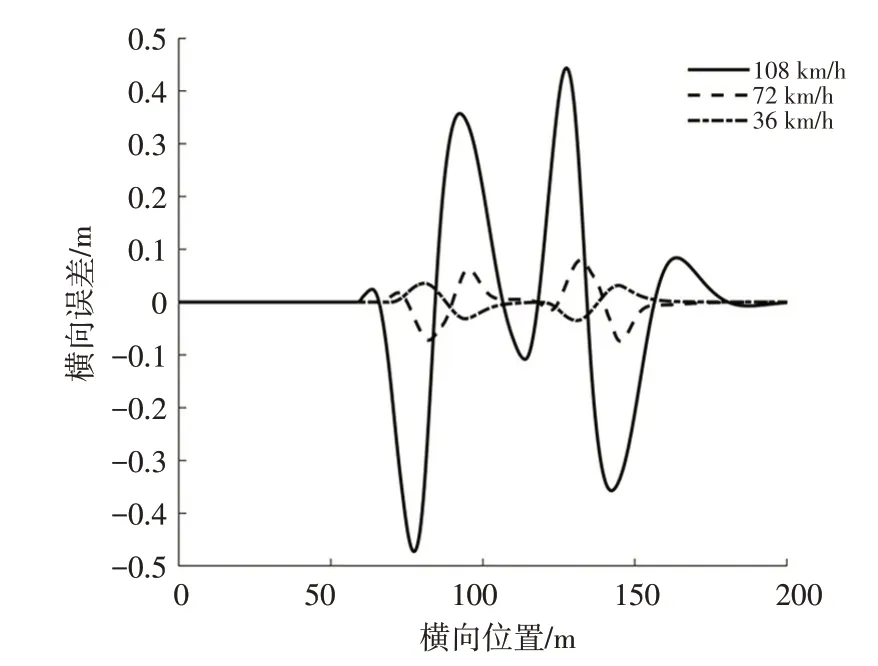
图19 横向误差
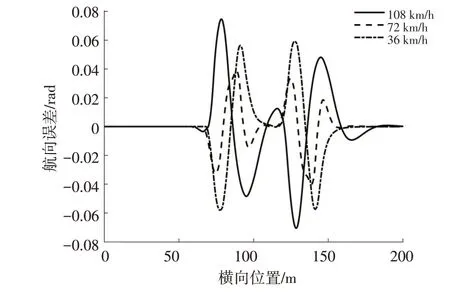
图20 航向误差
4 结束语
针对智能汽车路径跟踪问题,建立车辆路径跟踪误差动力学模型,横向上设计带有预瞄的LQR路径跟踪控制器,纵向上设计速度跟踪控制器,保证车辆横纵向的跟踪效果。针对横向LQR 控制器参数的不确定性,采用遗传算法,设计适应度函数,优化控制器的权重矩阵。在联合仿真环境下进行双移线和连续换道工况测试,结果表明车辆的横向误差和航向误差均比优化前的车辆误差值小。GA_LQR 控制器在低、中、高速下进行双移线的路径跟踪和速度跟踪,均有较好的跟踪控制效果,验证了所设计控制器算法的鲁棒性。
猜你喜欢
装备制造技术(2021年4期)2021-08-05 07:39:40
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
统计与决策(2017年2期)2017-03-20 15:25:24
电子制作(2017年24期)2017-02-02 07:14:16
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
智能系统学报(2015年4期)2015-12-27 09:38:39
法大研究生(2015年2期)2015-02-27 10:13:55