
基于直角坐标法的V-2RPa⊥R⊕2RSS 并联机构正逆解分析
2024-02-03 02:52:26邵国为
机电产品开发与创新 2024年1期
邵国为
(常州纺织服装职业技术学院, 江苏常州 213016)
0 引言
近几年, 学者们对四自由度或五自由度并联机构进行了大量的结构综合研究,并确定了其运动的可行性。众所周知, 具有SchÖnflies 运动的机器人 (也称为SCARA运动或3T1R 运动)可用于各种工业任务,如取放、装配、包装和喷漆等。 但相对于三平移的Delta 机构[1-4]要更加的复杂,而相较于六自由度并联机器人,随着3T1R 型并联机构运动学等分析支链数的减少, 并联机构的工作空间增大,奇异构型减少。 因此有必要对3T1R 型并联机构进行理论研究。
Delta 并联机构构型综合后,相关学者对其位置求解问题展开了广泛的研究[5-7]。 已知Delta 型并联机构输入,求输出的问题的解决方法(正解)有两种:解析法和数字法。 Romdhane[8]采用解析方法,对一类3 自由度机构的正解进行了计算, 并得出了输入与输出之间的位置关系方程。 赵杰等[9]运用几何和向量代数的方法,实现Delta 机构运动学正解的快速、直观的推导,避免了并联机构运动学多正解选择的难题。 张利敏[10]对其进行了深入研究,并给出了相应的运动学模型。 对于一些较为复杂的并联机构,其正解通常是不能得到的,所以常用的算法是牛顿迭代算法,但是这些算法得到的结果并不包括全部的结果,选择起来也很麻烦。
在3T1R 并联机构的运动分析方面,Mahboubkhah[11]等提出了一种可用于加工的高刚度并联机构。 Wu 等[12]采用几何投影法,同时运用闭环矢量法对具有3T1R 运动的4PPa-2PaR 并联机构进行瞬时运动分析。Li 等[13]利用组态演绎法设计了一种创新的3T1R 并联机构,并对其位置进行了深入分析。 Zhang 等[14]提出了一种通用的解决方案,用于求解3T1R 过约束并联机构雅可比矩阵和约束海塞矩阵的统一公式。
本文提出一种基于方位特征集的V-2RPa⊥R⊕2RSS并联机构运动学分析设计方法。 在此基础上,利用一维搜寻法,构建一种只有1 个虚拟变量的方位一致性模型,基于直角坐标法, 从而方便地给出了该正解的一个解析式,并给出了逆解求解结果来证明该正解的正确性。这为优化并联机构的参数以及研发原型机提供了一些理论支持。
1 机构结构分析
1.1 机构描述
参照图1,该机械装置包含了一个运动平台1 (位于图1 底部方框内) ,一个静止平台0,两个RSS 支臂和两个V 型方位布置的混合支臂V-2RPa⊥R。 两个混合支臂均是由四个球状(球副)连接点(Sa,Sb,Sc,Sd)形成的一个平行四边形组成,我们称之为Pa 部分(即“parallel”)。
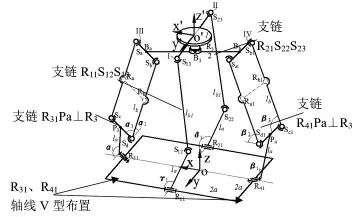
图1 V-2RPa⊥R⊕2RSS 并联机构及位置求解模型
两个由(Ra、Rb)的组成的杆安装在Pa 部件中平行四边形结构中间位置,平台1 上R3的轴必须与静平台0 垂直,从而得到3T1R 输出的混合支链V-2RPa⊥R。 静止平台0 上的4 个驱动副R11||R21、R31⊥R41,其中,R31与R41呈V 型布置。 动平台1 能够进行三移动和绕R3 轴线旋转(3T1R)运动。
1.2 计算耦合度κ
(1)确定混合支链HSOC1及其约束度△1。
由文献[15],HSOC1有两种选择方案:
①若选V-2RPa⊥R 支链构成HSOC1,即
HSOC1{R31||P(4s)-P(4s)-R(4s)-P(4s)-P(4s)-R(4s)||R41⊥R3-S13-S12-R11-}
由文献[15]有
②若2RSS 构成SOC1,即
SOC1{-R11-S12-S13-S23-S22-R21-}
则
应选择方案①
(2)确定及其约束度
SOC2由支链R21S22S23组成,即
SOC2{-S23-S22-R21-}
由式(1)有
(3)由此可得
结构只包含一个BKC,其耦合程度为1,能够获得所有的数值解[15]。
2 位置分析
2.1 位置正解分析
2.1.1 坐标系建立及符号标注
V-2RPa⊥R⊕2RSS 并联机构的正解问题可表示为:给定主动杆的输入参数α1,β1,γ1,δ1, 求解末端执行件1(动平台1)的输出参数(x,y,z)(三平移)和γ(一转动)。
如图1 所示, 直角坐标系统O-XYZ 的OX 与OY 轴均位于静态台的中心位置,该系统的X 轴、Y 轴及Z 轴分别对应于一条固定的线段,且通过使用右手定律来定义Z 轴。动坐标系统O'-X'Y'Z'的原点设在了S13S23的中部,当动平台开始移动时,X'轴、Y'轴和Z'轴沿着相应的方向运动。
图2 为V-2RPa⊥R⊕2RSS 机构展开图,静态平台长度设定为2a,宽度2b,而(末端执行平台)动态平台1 是一个等腰直角三角形,其边长为2m2。

图2 V-2RPa⊥R⊕2RSS 并联机构展开图
动平台1 围绕旋转副R3的旋转角度是动平台1 的输出姿态角γ,可表示为S13O'与OX 轴的所夹锐角,逆时针取正。
设定R3与B3的连接长度为q1,Ba与Bb连接长度为l,初始位置时,Ba和Bb的连线与Sa和Sb的连线、Sa1和Sb1的连线的夹角均为φ,此时设定R11与S12的连线,R21与S22的连线长度均为la1,S12与S13的连线长度、S22与S23的连线长度均为lb1;R31与P3的连线长度、R41与P4的连线长度均为la,P3与Ba的连线长度、P4与Bb的连线长度均为lb。
根据图1 和图3,Ш 和Ⅳ分支的输入角分别为R31与P3的连线(la)与XOY 平面的夹角(α1)以及R41与P4的连线(lb)与XOY 平面的夹角 (β1), 两个Pa 部分的平面分别与XOY 平面之间的夹角分别是α2,β2,Pa 部分的内夹角锐角分别为α3,β3,设定逆时针方向为正。

图3 III 支链与IV 支链的运动位置模型
I、 II 分支的主动输入角度是γ1,δ1,以相对于静坐标系OXY 的X、Y、Z轴线的角度来代表连接杆S13S12、S23S22在空间中的位置; 也就是γ2,γ3,γ4以及γ5,γ6,γ7的角度,见图4。

图4 I、II 支链计算模型
2.1.2 基于SOC 的位置建模分析
2.1.2.1 在△1>0 的条件下对HSOC1的运动位置建模
(1)由HSOC1(III、IV)支链,分别可得O’坐标值
由式(1)、(2)可得,

β3为中间值,可以消除,首先令
从而得到

解方程可得:
(2)由第一条支链(I 支链),得到R11S12S13支链上球副S12、S13点的坐标为:
进一步,由S12与S13两点之间的长度等于lb1,有
A1sinγ+B1cosγ+C1=0其中,
令
解之有:
得到输出角(γ*)的函数表达式,同样也是一个关于α3*的函数
即γ*=f2(α3*)
2.1.2.2 在△2<0 条件下的SOC2支链运动位置数学模型
由II 支链,得R21S22S23支链中的球副S22、S23点坐标为:
进一步,由S22与S23两点之间连线的长度等于S12与S13两点之间连线的长度,均为,建立其支链II 的位置方程,即
设定变量α3*在(0°,360°)范围内改变数值,在满足f()=0 的情况下,即可求解对应α3的数值解,由式(2)、(4)、(5)即可求得动平台位置解o'(x,y,z);代入式(7),即可求得动平台绕Z 轴旋转角度γ。
2.2 位置反解求解
V-2RPa⊥R⊕2RSS 并联机构的反解问题可描述为:给定动平台1(末端执行器)的位置、姿态参数(x,y,z)(三平移)和γ(一转动),求解主动杆相对于XOY 平面的输入角度参数α1,β1,γ1,δ1。
2.2.1 基于直角坐标法求V-2RPa⊥R⊕2RSS 机构中各位置坐标
由2.1.2 可知,
Ba点在静坐标下矢量方程
Ba点在静坐标下矢量方程
则S13的绝对坐标为:
即
同理可得R21S22S23支链中的球副S23的在静平台坐标系O-XYZ 下的坐标为:
2.2.2 建立位置方程
根据连杆约束条件可得:
2.2.3 求输入角α1,β1,γ1,δ1
由(14)式可得R31Pa⊥R3支链主动输入角α1:
其中,A1=2(z-q1)la
由式(15)可得R41Pa⊥R3支链主动输入角β1:
其中,A2=2(z-q1)la
由式(16)可得R11S12S13支链主动输入角γ1:
其中,A3=-2zla
由式(17)可得R21S22S23支链主动输入角δ1:
其中,A4=-2zla
当输出参数和已知时,α1,β1,γ1,δ1分别有两组解。 故位置逆解数为2×2×2×2=16, 因此,V-2RPa⊥R⊕2RSS 并联机构动平台可输出有16 种构型。
2.3 实例验算
2.3.1 正解算例
因V-2RPa⊥R⊕2RSS 机构与H4(I4R)均含有Pa 复杂支链,为便于后续性能对比,取与产业用H4 并联机构相同的尺寸,即,
令相应杆长尺寸数据为:la=375,lb=800,la1=375,lb1=880,a=400,b=400,m2=200; 其余还参数包括:l=350mm,q1=40mm,φ=45°。 对主动杆输入角进行赋值,

依据式(1)~式(9),通过使用一维搜寻方法[15],可以从两组角度中得到V-2RPa⊥R⊕2RSS 机构末端执行器的四个位置,如表1 所示。

表1 V-2RPa⊥R⊕2RSS 并联机构的末端位置
2.3.2 逆解算例

3 样机CAD 建模
图5 展示了V-2RPa⊥R⊕2RSS 并联机构的虚拟样品设计总图,其中包括静态平台0、动态平台1、动态平台2、RSS 支链3、复杂支链(含Pa)4 和驱动系统5 这六个主要部分。

图5 V-2RPa⊥R⊕2RSS 并联机构的虚拟样机图
3.1 支链设计
V-2RPa⊥R⊕2RSS 并联机构由四条支链并联耦合而成, 为动平台传递运动、末端执行件承受载荷,支链的结构须在满足工况的前提下,质量尽量轻。 因此,四个支链中的主动臂和从动臂都使用了碳纤维编织管状结构, 这种结构具有轻量化、高强度和高模型等优点。RSS 支链与复杂支链(含Pa)的3D 结构如图6 所示。
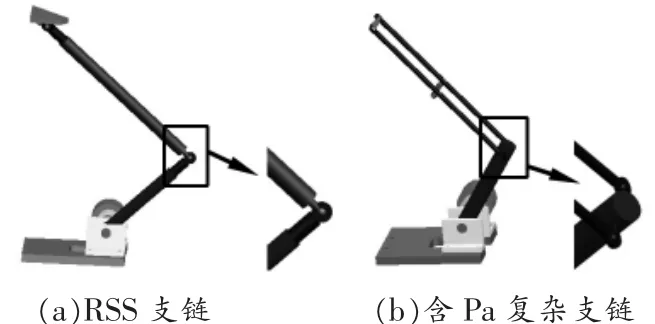
图6 支链结构图
3.2 动、静平台的设计
子动平台1和子动平台2是相互垂直并且通过转动副连接,进而实现V-2RPa⊥R⊕2RSS 并联机构末端的绕Z 轴的旋转运动,同时通过球关节(S13 或S23)分别连接两个RSS 支链,从而构成了可实现三平移一转动输出运动的V-2RPa⊥R⊕2RSS 机构的结构。同时,该并联机构的静平台0 安装有4 块电机安装板,4 台伺服电机,结构如图7 所示。

图7 静平台结构设计
4 结论
提出了一种四自由度V-2RPa⊥R⊕2RSS 并联机构, 结构比H4、I4R 机构更为简单、动平台装配结构更为容易。
利用一维搜索计算出了V-2RPa⊥R⊕2RSS 并联机构的耦合度,并得到四组机构末端位置数值解。进一步求解后,我们得出了机构位置反解的解析式。
这个结构设计简洁,为后期的动力学分析奠定了基础。
猜你喜欢
快乐语文(2021年27期)2021-11-24 01:29:24
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
快乐语文(2021年11期)2021-07-20 07:41:48
快乐语文(2020年36期)2021-01-14 01:10:44
快乐语文(2019年12期)2019-06-12 08:41:56
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
实用手外科杂志(2015年2期)2015-08-28 09:50:56
饲料博览(2015年4期)2015-04-05 10:34:14
