
基于时序图推理的设备剩余使用寿命预测
2024-02-03 10:41刘雨蒙王宏安
自动化学报 2024年1期
刘雨蒙 郑 旭 田 玲 王宏安
随着高新技术的发展和生产工艺的进步,一大批科技含量高、结构复杂的设备已经投入到我国工业和国防等领域.但设备中某些部件在运行过程中由于疲劳磨损、腐蚀、老化等原因,设备性能的退化将无法避免,一旦因性能退化造成设备失效,可能会引起事故和不必要的人员伤亡,造成灾难性的后果以及重大的经济损失[1-2].剩余使用寿命(Remaining useful life,RUL)预测作为设备故障预测与健康管理(Prognostics and health management,PHM)的关键技术之一[3-5],可以在设备性能退化初期对其RUL 进行精确的预测,为运维人员的预防性维修和备件订购等活动提供指导性依据[6],较大程度上减少不必要的停机时间,避免事故的发生,进而有效保障设备的安全性和可靠性,并提高任务的完成率[4,6].
当前,对RUL 预测技术的分类包括基于机理模型的预测方法、基于数据驱动的预测方法以及基于机理模型和数据混合驱动的预测方法[7-8].传统的以专家经验为主的机理模型RUL 预测方法通过设备的失效机理,结合设备先验知识构建数学模型,并利用实时采集的监测数据,实现对设备的RUL预估[9].常见的用于RUL 预测的机理模型包括Paris 模型、Forman 模型以及在两个模型基础上进行各种改进的模型[10].但随着设备或系统的结构复杂性变高以及设备运行环境的多样性,故障模式和失效机理也变得更为复杂,导致难以建立精确的机理模型.
近年来,随着传感器技术的革新,获取设备的状态监测数据变得愈发容易[11-12].这也给数据驱动的RUL 预测方法提供了契机,可以缓解机理模型对复杂设备建模困难的问题[13-14].同时,由于深度学习技术迅速发展,在各个领域的数据分析任务中都展示出超越性.采用深度学习的RUL 预测方法可以不依赖设备或系统的机理知识,实现退化特征的自动提取,进而实现端到端的RUL 预测[15].目前,普遍采用的深度学习方法进行RUL 预测主要包括以下几类: 卷积神经网络(Convolutional neural network,CNN)、循环神经网络(Recurrent neural network,RNN)、时间卷积网络(Temporal convolutional network,TCN)及Transformer 模型[16].
具体而言,卷积神经网络基于不同大小的感受野组合,学习同一时间段内不同感知节点间的关联关系,从中发现设备退化状态,进而预测其RUL[17].Babu 等[18]首次提出基于CNN 的RUL 预测模型,通过卷积层和池化层来捕获传感器信号特征,结合多层感知机(Multilayer perceptron,MLP) 对轴承RUL 进行预测.Li 等[19]进一步采用时间维度的卷积层和池化层自动学习多维时间序列特征,并利用前馈神经网络对RUL 进行预测.卷积神经网络能够关注不同传感器节点间的关联关系,发现其退化特征信息,但对时序特征的提取能力不足,不利于预测设备RUL 这一具有显著时序特性的任务.
为此,大量研究人员[20-21]采用RNN 模型或长短时记忆网络 (Long short-term memory,LSTM)[22-25]等改进方法进行设备的RUL 预测.例如,Zheng 等[22]提出了LSTM-FNN 模型用于预测航空发动机RUL,模型在LSTM 层上新增了一个前馈神经网络用于提升模型预测性能.康守强等[25]提出了SAE-LSTM 滚动轴承RUL 预测模型,利用改进SAE 对滚动轴承振动信号实现无监督的特征提取,并将提取出的深层特征作为滚动轴承的性能退化特征.同时,通过引入Bi-LSTM 以实现滚动轴承过去和未来信息的充分利用,从而完成滚动轴承当前寿命预测.然而,LSTM 或者门控循环单元 (Gated recurrent unit,GRU)等循环神经网络模型处理较长历史数据效率较低.针对此类问题,部分研究人员[26-28]利用TCN 中的因果卷积来学习更深层的特征,获得更大的感受野,以便模型能够更好地学习序列的时间相关性.如Chen 等[26]采用TCN 对航空发动机RUL 进行预测,性能得到了提升.
为了更好捕获时间序列数据中的长期依赖关系,并自主发现设备发生退化的关键时间点,部分学者[29-31]采用Transformer 模型实现对设备的RUL预测.例如,Mo 等[29]提出了一种基于预训练模型的预测框架,以Transformer 模型中的编码器作为模型主干,通过自注意力机制,挖掘不同传感器的感知数据规律关联,以及与RUL 的关联关系,实验结果表明该方法能够显著降低预测误差.然而,Transformer 模型仍未能利用设备在运行过程中的各部件的状态变化趋势,其具体体现为无法学习不同传感器关联关系的变化规律.从而为图神经网络特别是基于时序图神经网络的RUL 预测模型提供了动机.
综上所述,当前深度学习模型主要关注各传感器局部时间范围的关联,未考虑在一个较长周期内各传感器之间的关联关系模式及其影响、变化情况.实际上,不同传感器节点之间的感知数据存在一定的关联,如正关联、负关联、传递关联等.而在设备运行的不同阶段,关联性也会随之改变,预示着设备性能的退化.以飞行器工作为例,在其运行早期,相近的部件之间可以保持振动模式的一致性、传递性;而随着工作架次的累积、部件的老化和结合部的松动,这种一致性会逐步减弱,并预示着潜在的设备故障的出现.为此,利用不同传感器节点间关联关系的模式规律、演变趋势,同样能够反映出设备的稳定性变化,进而为设备RUL 预测提供更加充分的佐证.
为此,本文提出一种基于多变量分析的时序图推理模型(Multivariate similarity temporal knowledge graph,MSTKG),能够充分利用传感器运行状态耦合关系及其变化趋势,挖掘其中蕴含的设备性能退化信息,用于设备RUL 精确预测.通过构建多个连续时间切片内的传感器节点关系图,并基于连续的图结构进行表示学习,充分发现设备各部件间的状态时空关联,刻画不同传感器节点间关联关系的变化过程.该模型能够预测未来时刻的节点属性、关联以及整体信息,从而作为设备RUL 预测的分析依据.
本文主要贡献如下:
1) 提出一种基于图推理的剩余使用寿命预测框架,能够利用不同传感器关联关系的变化趋势,发现设备性能退化,从而预测RUL;
2) 设计一个时序图卷积神经网络,通过聚合不同传感器节点的特征值,实现节点关系的表征学习,该结果可以用于寿命预测、节点相关性预测等多个任务;
3) 基于基线数据的大量实验分析表明,所提出的方法能够更加准确地预测设备的RUL.
本文内容组织如下: 第1 节介绍RUL 预测的任务描述和问题定义;第2 节介绍用于感知数据表示和RUL 预测的多变量分析时序图推理模型;第3 节介绍实验设置与结果分析;第4 节为本文总结.
1 剩余使用寿命预测问题描述
本节对RUL 预测任务进行描述,包括运行设备的基础系统设定以及寿命预测的问题形式化定义.
1.1 设备工作状态感知系统基础设定
本文所提出的模型主要面向具备多种工况、在不同部件集成了多个传感器的设备进行剩余寿命预测.具体地,假设运行中的设备在不同部分共集成了N个传感器,定义为 {S1,S2,···,SN}.每个传感器以t0频率进行数据采集,记录其所在部件的工作状态参数,如振动幅度、温度、风速等.所有的感知数据形成数据集合{{d11,d12,···},{d21,d22,···},···,{di1,di2,···},···,{dN1,dN2,···}},其中,d ij表示第i个传感器在第j个运行时刻采集的感知数据.一般地,本文所提出的预测模型允许感知数据属于不同类型,也允许传感器节点拥有不同的采集频率.针对不同类型的感知数据、不同采集频率,采用归一化分析与数据对齐方法,实现数据预处理.
传感器节点将采集到的感知数据传输至中央节点,进行数据分析.具体地,假设设备在工作T个运行时刻后出现故障,则在任意轮次T0,设备的RUL记为 |T-T0|.
1.2 剩余寿命预测问题定义
RUL 预测问题定义为: 通过对多个传感器的感知数据进行分析,估计设备可以正常运行的时间长度.
2 基于多变量分析的时序图推理模型
本节创新性地提出了用于设备RUL 预测的多变量分析时序图推理模型,能够充分挖掘多传感器时序特征和传感器间关联关系的演变趋势.主要介绍传感器节点关联关系时序图构建、关联特征学习网络设计、感知数据时序特征编码以及RUL 预测损失函数设计.
2.1 模型概述
提出基于多变量分析的时序图推理模型,用于RUL 预测.模型整体结构如图1 所示,主要由3 个部分组成.时序图构建模块将每个传感器的感知数据划分为若干时间片,每个时间片对应一个关联图,图中节点间的关联关系由该时间片内的感知数据决定.多个时间片形成按时序排列的节点关联图序列.节点关联特征学习模块采用局部循环编码网络,分别针对传感器节点时空关联演变特征和原始感知数据信息进行建模与表示学习,从前一模块输出的关联图序列中学习设备的状态特征.最后,采用回归模型将设备状态特征映射到连续空间中,实现RUL 预测.

图1 MSTKG 模型结构图Fig.1 Structure of MSTKG model
2.2 时序图构建
布置在设备各部分的传感器节点,可以通过数据感知的方式,记录设备不同部分的运行状态.而不同时段、相近传感器节点的感知数据关联关系,能够刻画设备各部分间的耦合状态.这一状态本身及其变化,隐含着设备稳定性、性能退化情况,可以作为设备健康情况的评估依据.为此,设计时序图结构,实现不同时段下传感器节点的关联表示.具体而言,时序图结构定义如下:
定义1.假设G={G1,G2,···,GK}为一个时序图序列,其中,Gi={Vi,Ei}为对应第i个时段的时序图,Vi表示第i个时段的节点集合,记为Vi={vi1,···},Ei表示节点集合Vi间的关联,其中eijk∈Ei表示v ij与v ik间的关联类型.
时序图模型能够刻画节点在不同时段的关联关系,从而建模其变化趋势,为RUL 预测提供相关信息.具体构建过程如下: 将时序图中节点定义为各个传感器,即
为便于记录,略去时间段下标,简记为{v1,v2,···,vN}.时序图中边的定义方式如下:
假设任意两个节点间存在关联性,通过边的权值表示.具体地,针对e ijk,即第i个时间段内传感器vj与vk的关联,首先截取数据子序列
其中,P为一个时间段的时间长度.对于每一对数据子序列Dji与Dki,首先采用min-max 方法对感知数据进行归一化处理,并采用动态时间归整 (Dynamic time warping,DTW) 算法两两计算数据子序列之间的相似度,作为节点关联性度量
Sim是子序列之间的相似度,DTW 是一种常用的序列距离度量方法,能够衡量两个序列的模式相似度,并允许存在模式的偏移和拉伸.如图2 所示,DTW 方法会自适应地寻找两个序列的最佳匹配模式.
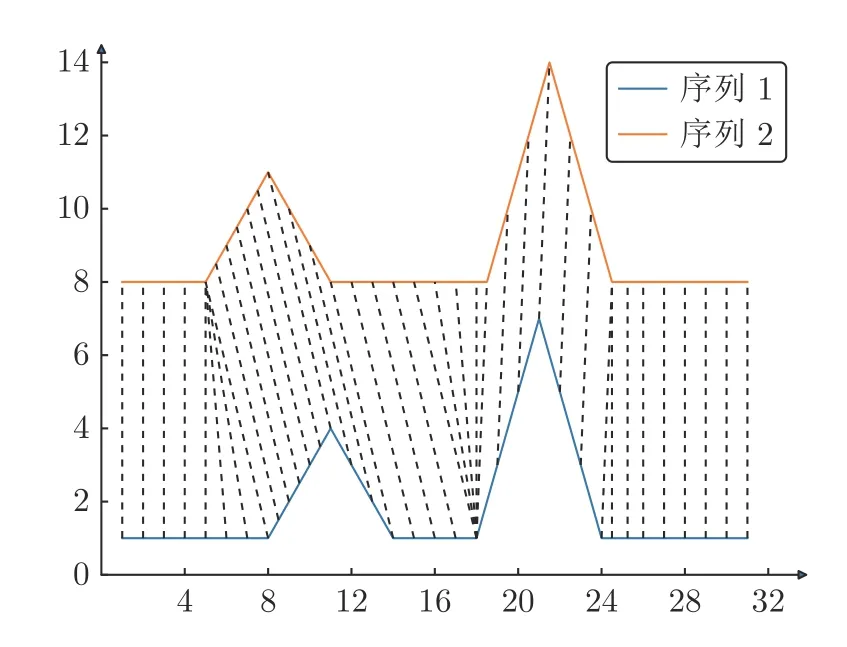
图2 DTW 示意图Fig.2 Illustration of DTW
DTW 度量方法能够刻画两个序列间的模式关联性,并且不受时间偏移的影响,能够更好地表示传感器节点间的状态关系,如振动在设备不同部分的传递情况以及振动周期变化等.同时,本文所提出的预测模型同样适用于余弦相似度等关联度量方法.具体计算过程中,DTW 通过动态规划方法,找到两个序列的最近距离匹配模式,并计算出距离,动态规划计算公式为
其中,D TWi,j代表时间序列 {x1,x2,···,xi}与{y1,y2,···,yj}之间的DTW 距离,对应于时序图中的Dji与Dki,abs 为绝对值函数.假设时间序列x的总长度为N,y的总长度为M,则x与y的DTW距离为 D TWN,M,该距离具有速度无关性,即不会受到时间序列形状伸缩的影响.
随后,对同一时间段内所有节点对计算其感知数据子序列的DTW 距离,并对相似度进行归一化处理.将相似度取值范围均匀划分为Nr个区间,分别标记为 {R1,R2,···,}.针对每一对传感器节点,通过将相似度归入相应的区间,并采用相应区间标识,实现从连续相似度到离散关系的转化.DTW相似度的归一化计算及关系类别转化公式如下
其中,N ormalizedSim为归一化后的相似度,T0为输入数据中的最后一个时刻,N为传感器个数;Nr为划分出的区间个数,即关系数目,为向下取整,eijk为第i个时间段内节点vj与vk之间的关系,max,min分别表示最大值和最小值函数.
基于上述方法,构建出用于RUL 预测的时序图序列G={G1,G2,···,GK},作为推理模型的输入.
2.3 节点关联特征学习网络
节点关联特征学习网络基于传感器感知数据和时序图结构进行特征学习,主要包含两个特征维度:传感器节点关联的时序特征和原始感知数据的时序特征,本节将分别针对这两个部分的模块设计进行介绍.
2.3.1 传感器节点关联特征编码
提出局部循环编码器,基于同一时段不同传感器、以及传感器在不同时段的状态关联关系,通过传感器节点状态表示,学习关联特征变化趋势,为RUL预测提供依据.其输入为前一步骤构建的时序图序列G={G1,G2,···,GK},以及图中各个节点的随机初始化特征.
采用图卷积网络(Graph convolutional network,GCN),从节点数据相关性角度对时序图中的信息进行聚合,并在多个时间片段之间使用GRU 进行演化,学习传感器节点不同时间段的关联关系变化.
首先,在每一个时间段内,GCN 通过如下公式聚合多个关系以及多跳传感器邻居节点的信息,形成目标传感器节点的特征表示
其次,在多个时间段之间使用两个GRU: 实体GRU 和关系GRU,进行演化特征的学习,刻画传感器节点在设备运行过程中的状态变化情况,即关联关系变化趋势.
GRU 是一种基于门控机制的循环神经网络,通过组合多种不同作用的门结构,对时序数据进行建模,能够支撑节点不同时段的状态特征传递.具体计算公式如下
针对实体GRU,其具体演化特征表示公式如下
通过上述GCN 和GRU 模块的计算,最终的输出为传感器节点特征矩阵和关联特征矩阵,实现基于时序图序列全面表示传感器节点之间在空间、时间上的状态变化及关联.
2.3.2 感知数据时序特征编码
时序图主要用于刻画传感器节点间的状态变化,重点利用了感知数据所蕴含的关联关系.然而,感知数据中固有的对设备运行状态变化趋势的记录,同样可以为RUL 预测提供依据.为此,在时序图推理的基础上,引入对原始感知数据的编码和时序特征学习.
具体地,在实体GRU 和关系GRU 对实体嵌入和关系嵌入进行演化学习时,引入原始传感器数据,扩充特征语义.实体GRU 的特征联合公式改进如下
基于上述编码,将原始感知数据融入特征表示,并结合GRU 充分学习其时间变化特性,支撑RUL 预测.
2.4 剩余使用寿命映射及损失函数
在RUL 映射部分,通过回归分析,利用时序图推理所得的传感器节点特征Ht和传感器关联特征Rt,获得对设备RUL 的预测.
回归分析主要包含两个步骤:
原始特征拼接: 将特征矩阵转化为一维向量,支持后续回归分析,其具体公式为
其中,f latten(·) 为向量扁平化操作.
RUL 估值分析: 将一维特征输入单层神经网络,输出RUL 预测值,其公式为
最后,RUL 预测任务的损失函数为均方根误差(Root mean square error,RMSE),损失函数如下
其中,Dtest为测试数据集.
3 实验分析
本节主要对所提出的模型进行实验分析.首先,对基线数据进行介绍,并结合数据特点进行数据预处理和特征选择.其次,介绍本实验的实验设置、对比算法和预测结果的评价指标.然后对本文提出的模型与对比算法的结果进行分析,并通过消融实验对模型中不同组合进行分析.最后,选取测试集中两个发动机单元进行案例分析,验证模型的有效性.
3.1 数据准备
在CMAPSS (Commercial modular aeropropulsion system simulation)数据集上进行实验测试,验证模型的有效性.CMAPSS 数据集来自于第一届PHM 国际会议[32],由名为C-MAPSS 的涡扇发动机仿真模型建立,通过仿真模型模拟涡扇发动机退化过程.其内部根据不同的设置可以分为FD001、FD002、FD003 和FD004 四个数据子集.每个数据子集包括训练数据集和测试数据集,训练集为发动机从初始状态运行到完全失效的数据集合,测试集为发动机的退化数据集合.
每个数据子集是由26 个参数构成,其中第一个参数为发动机编号,第二个参数为时间编号,第三个参数到第五个参数为运行状态,最后21 个参数为发动机重要的传感器监测数据,重点用于发动机RUL 预测,如表1 所示.

表1 CMAPSS 传感器数据描述Table 1 The description of CMAPSS sensor data
数据集涉及6 种运行状态和2 种故障模式,根据不同的运行状态和故障模式进行分类,如表2 所示.FD001 和FD003 分别只在一种状态下运行,FD002 和FD004 分别在6 种状态下运行.其中,FD001 和FD002 数据集中只包含高压压气机故障,FD003 和FD004 包含了两种故障模式,分别为高压压气机故障和发动机风扇故障.

表2 CMAPSS 数据集中4 个子集的细节信息Table 2 Detailed information of four subsets of CMAPSS dataset
在数据预处理阶段,由于传感器数据具有不同的取值范围,采用min-max 归一化方法对传感器数据进行归一化处理,其公式为
其中,d ij表示第i个传感器在第j个运行时刻采集的感知数据,表示归一化后的传感器数据,T为设备运行的最后一个时刻,N为传感器个数.
图3 为FD001 1 号发动机传感器监测数据归一化处理后的非零结果,由于部分传感器监测数据在归一化后数值为零,意味着这些监测数据在整个生命周期中非常稳定,甚至为常量,这些传感器在RUL 预测中没有提供有用的信息.因此,实验选取了14 个具有显著波动的传感器监测数据作为输入,包括编号为2、3、4、7、8、9、11、12、13、14、15、17、20 和21 的传感器.
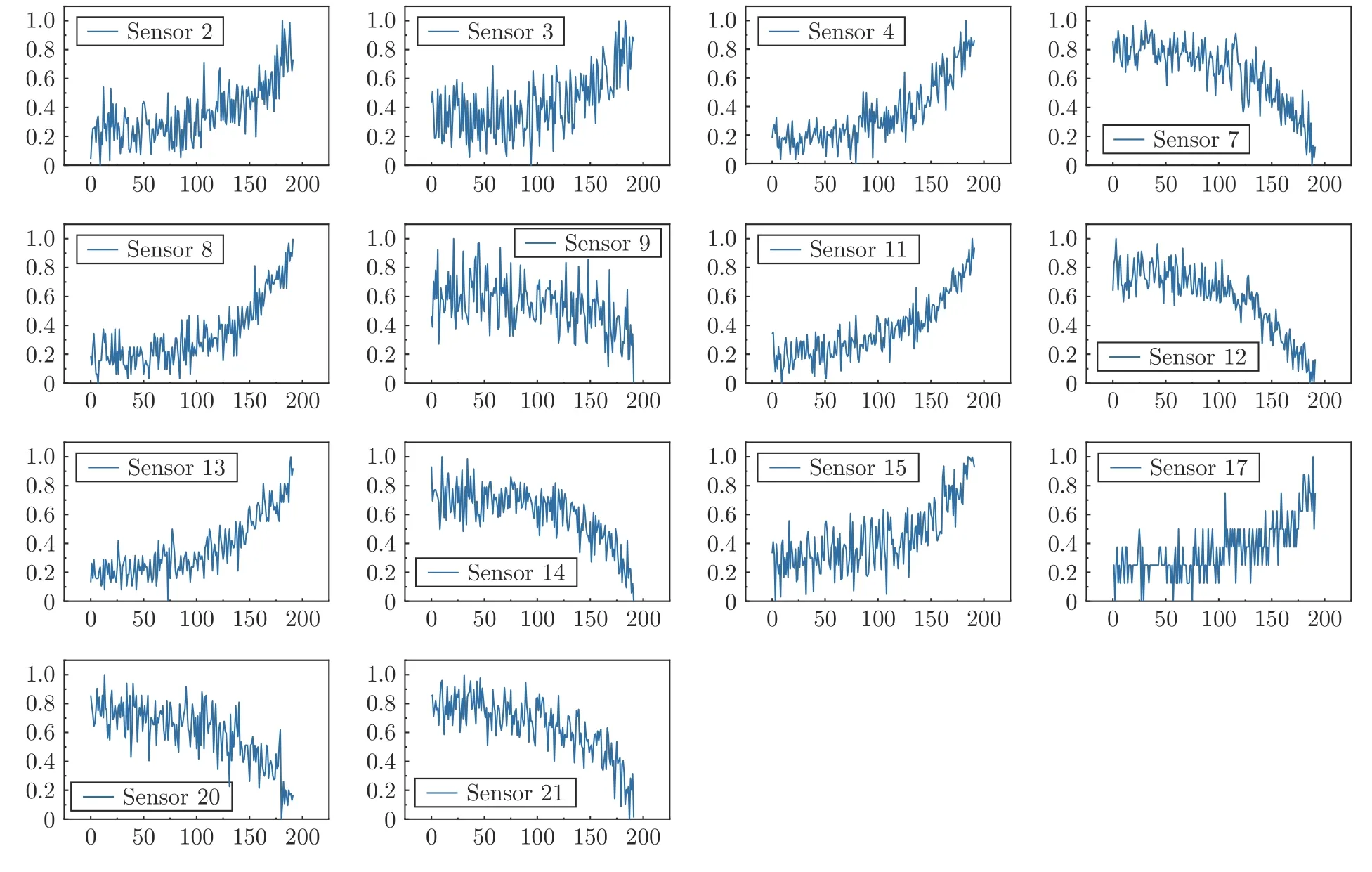
图3 FD001 1 号发动机传感器监测数据Fig.3 Sensor monitoring data for engine unit 1 of FD001
此外,与其他模型不同,本文所述模型需要对时序数据进行采样来构造时序图.采样窗口以固定的步长在每一个数据单元内滑动采样,并且将窗口内最后一个时间戳的RUL 作为生成的知识图谱快照的RUL 标签.
最后,由于系统在运行初期不会发生退化,故系统退化在其生命周期的早期阶段可以忽略不计,本文参照文献[4],采用分段线性模型为数据集打上RUL 标签,即对RUL 的最大上限值设定为125,(R ULmax=125).
3.2 实验设置及对比算法
3.2.1 实验设置
在PyTorch 1.6.0 和DGL 0.5.2 上实现了所提出的基于多变量分析的时序图推理模型.基于多组参数的测试结果择优选择,将采样窗口长度L设定为5,步长S设定为1,关系数目R设定为10,并将RULmax设定为125.随机选取数据集(FD001、FD002、FD003、FD004)的80%和20%分别作为训练集和测试集.
对于时序图编码部分,将嵌入维数d设定为100,GCN 中的层数设定为2,dropout 率设定为0.2,时序图历史的长度m设定为7,在演化过程中对梯度进行归一化处理.使用Adam 进行参数学习,其学习率设定为0.001,并且使用梯度裁剪来避免梯度爆炸.
最后,在回归分析阶段,使用一个单层的带偏置MLP 进行RUL 的预测.
3.2.2 对比算法
分别选取基于卷积网络、循环神经网络和编码解码机制的代表性模型作为对比算法.
CNN (2016)[18]、CNN-FNN[19]沿时间维度对传感器数据进行卷积操作,利用FNN 对RUL 进行预测.
DCNN-FNN[33]使用空洞卷积CNN 替换上述工作中的CNN,扩大卷积核的感受野来提高模型的预测精度.
LSTM-FNN[22]使用LSTM 直接对传感器数据进行建模,以自回归的方式训练模型,并且通过FNN 提高RUL 的预测精度.
RBM-LSTM-FNN[30]在LSTM 之前附加了一个受限玻尔兹曼机,以无监督的方式进行预训练,自动从未标记的原始训练数据中提取退化相关的特征.
Autoencoder[21]通过无监督的方式训练一个双向LSTM,对健康指数(Health index,HI)曲线进行建模,然后结合基于相似度的曲线匹配技术以及零中心规则来计算RUL.
GCU-Transformer[29]通过卷积门控提取局部特征,利用Transformer 的编码层对高维传感器数据以及局部特征进行编码,最后使用单层神经网络解码得到RUL.
3.2.3 评价指标
本实验采用RMSE 和Score 指标作为RUL 预测任务的性能指标.RMSE 定义如下
其中,N为测试单元的数目.Score 指标通过缩放,让偏向于预测更少剩余寿命的模型获得更好的评价,其定义如下
其中,ei表示第i个测试样本上的预测值与真实值的差值.考虑到剩余寿命预测时,偏小的预测结果可以供操作人员提前应对,引发的后果更轻,因此,Score 指标可以作为RMSE 的补充.
3.3 剩余使用寿命预测结果分析
表3 展示了本文模型MSTKG 以及对比算法在CMAPSS 的4 个子集上进行RUL 预测的结果.具体地,由于4 个数据子集规模不同,采用加权平均方法计算结果均值.结果表明,MSTKG 在FD002和FD004 上的性能优于最先进的模型.针对RMSE指标,性能在FD002 和FD004 上的提升分别为0.89 和1.29,并且在4 个子集的平均性能上提升了0.58.针对Score 指标,MSTKG 模型在FD002和FD004 上的提升分别为1 044.09 和455.4,并且在4 个子集的平均性能上提升了671.9.
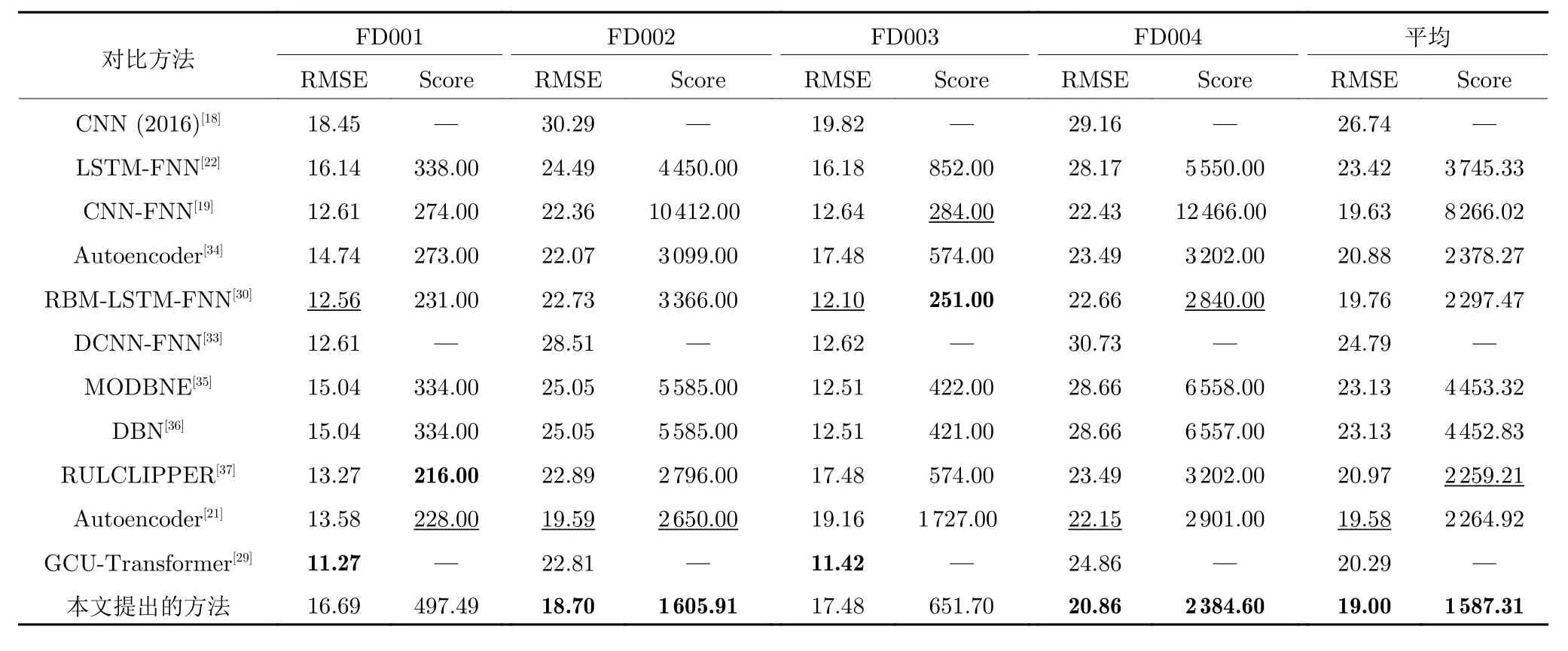
表3 CMAPSS 数据集实验性能对比Table 3 Comparison of experimental performance on the CMAPSS dataset
观察可知,与Autoencoder 类似,MSTKG 在工作条件复杂、发动机样本数量更多的数据子集上取得了更好的效果.对于最复杂的FD004 数据集,它共有12 种设置: 6 种运行工况以及2 种故障模式.所提出的模型通过时序图学习模块,隐式地表征学习设备各部件状态的关联变化,从而扩充了更多的特征维度,可以更加全面地表征设备的整体运行状态,进而在复杂的数据集上取得最佳表现.
此外,针对4 组数据子集,进一步将MSTKG对数据集中每一个发动机单元的RUL 预测值与真实RUL 值进行比较.RUL 预测结果如图4 所示,图4(a)~4(d) 分别为FD001、FD002、FD003、FD004 每个数据子集全部发动机单元的RUL 预测结果,其中发动机编号按照实际RUL 大小降序排列.

图4 FD001~FD004 RUL 预测结果Fig.4 Prediction results of RUL on FD001~FD004
通过观察分析可知,MSTKG 在4 个测试集上的结果类似: 针对RUL 较大的测试单元,预测的误差较大;而针对RUL 较小的发动机单元,预测的误差较小,预测结果更接近真实值.
具体而言,针对RUL 较大的测试单元,其运行时间较短,设备运转状态良好,传感器难以有效记录与设备退化相关联的特征,无法精确估计设备的RUL.但同时,MSTKG 的预测值与真实值的差值相对稳定 (在4 个测试集上均为25 左右),反映出MSTKG 模型在早期的预测稳定性较好.
针对 RUL 较小的测试单元,其运行时间较长,设备各部件出现退化,会体现在传感器节点的关联变化.而MSTKG 能够充分利用这一特点,提升预测精度,特别是针对FD002 和FD004 两组工况更加复杂的测试集,MSTKG 仍能维持稳定的预测精度,性能优于基于卷积神经网络及循环神经网络的方法[29].
为进一步比较MSTKG 针对不同测试单元的性能,在表4 中分组统计了针对4 个测试集前30%、后70% 测试单元的结果.可见,MSTKG 模型的RUL 预测性能表现有较大提升,RMSE 的变化分别为-4.27、-6.63、-3.48、-4.42,印证了MSTKG对感知数据中蕴含的设备各部件关联变化信息的利用能力.
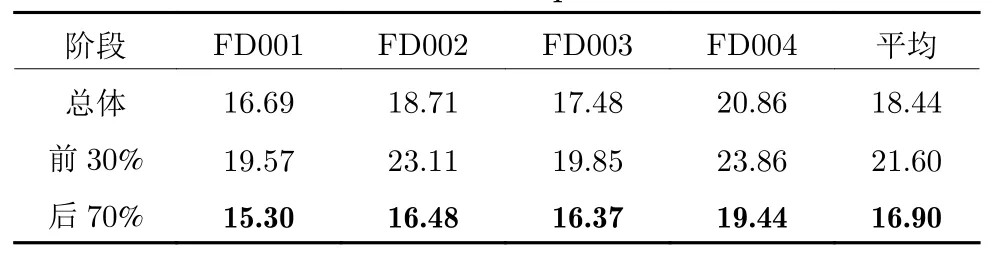
表4 阶段性RUL 预测均方根误差Table 4 Phased RUL prediction RMSE
3.4 消融实验
本节通过消融实验,验证分析节点关联特征学习模块中,各个特征维度对RUL 预测的贡献程度.具体而言,分别分析传感器关联关系的演变特征、传感器关联关系的静态特征、原始感知数据特征对寿命预测性能的影响.这三类特征分别刻画了传感器关联变化信息、关联关系语义信息、感知数据语义信息.表5 展示了在FD002 数据子集中的消融实验结果,可以得到如下结论:
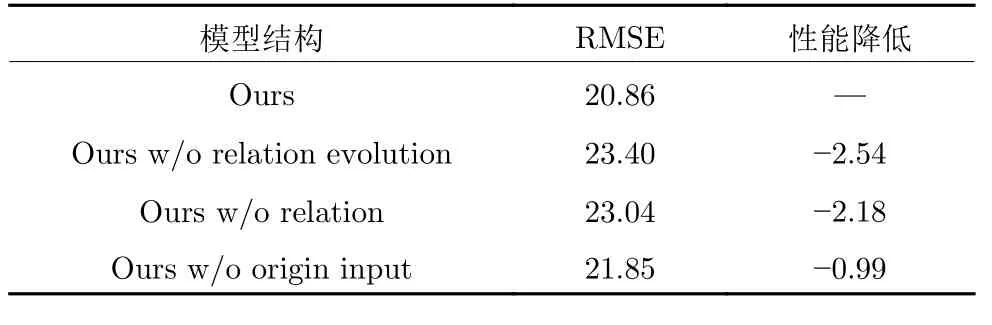
表5 FD002 数据子集上对不同结构的消融研究Table 5 Experimental ablation study on different structures on FD002
1) Ours w/o relation evolution,该消融结构移除了关系嵌入的演化模块,即仅使用静态关系嵌入.在FD002 数据子集上,RMSE 性能降低了2.54.这表明动态关系嵌入能够更好地捕获设备状态变化,亦即利用传感器的关联变化信息可以提升模型的寿命预测性能.
2) Ours w/o relation,该消融结构仅使用关系演变信息,忽略关联关系本身的语义信息,并且在回归层也不引入静态关系嵌入.在FD002 数据子集上,RMSE 性能降低了2.18.这验证了节点间关联关系固有的特征信息,对于RUL 预测同样有影响,并且其影响程度略低于关系的演变特征.
3) Ours w/o origin input,该消融结构不再将原始数据输入用于实体嵌入和关系嵌入演化的GRU,即不考虑感知数据中蕴含的语义信息.在FD002 数据子集上,RMSE 性能降低了0.99,反映出引入原始数据信息能够提升RUL 预测结果.
3.5 案例分析
分析传感器节点关联与设备RUL 的对应关系,分别选取FD003 测试子集中的39 号和47 号发动机单元进行分析,结果如图5 所示.

图5 FD003 中39 号和47 号发动机单元预测结果分析Fig.5 Prediction results analysis of unit 39 and unit 47 engines on FD003
FD003 测试子集中的39 号发动机单元的RUL 如图5(a)所示,RUL 的预测值由120 逐步下降至20,接近真实RUL.同时,可以发现传感器节点的关联关系逐步由高度相关向杂乱无关变化,即图中表示弱关联关系的比例逐渐增加(图5(b)中的0~4 和图5(c)中的0~3).因此,可以反映出设备各个部件随着性能退化,其紧密的耦合关系也难以维持.而MSTKG 模型能够充分利用这一信息,学习节点特征,进行RUL 预测.
FD003 测试子集中的47 号发动机单元的RUL如图5(d)所示,RUL 的预测值维持在105~110 之间,未出现显著的性能退化.同时,可以发现传感器节点的关联关系也维持在一个相对稳定的范围.例如图5(e)中,关联类型为5~9 的强关联节点对比例始终维持在0.6 左右.而图5(f)中,三种关联程度的占比同样较为稳定,弱、中、强关联的节点对比例接近3:4:3.而MSTKG 模型能够发现节点关联稳定性,进行较为平稳的RUL 预测.
此外,进一步进行测试分析,观察在发动机运行的不同阶段节点之间关联依赖的分布变化,以FD004 中的229 号发动机单元为例,其特征变化如图6 所示.在发动机运行的早期,无论是时间二阶段划分还是四阶段划分,传感器特征之间的依赖性较强,特征间的DTW 距离相对较小、比较平稳,趋近于平均分布.随着时间的推移和设备剩余寿命的下降,较小的关系,即较小的DTW 距离,数量逐渐变少,表明特征之间的依赖性逐渐减弱.与之相对,较大的关系逐渐增多,设备特征间整体关联趋向于无序.MSTKG 模型能够表征这种关系依赖变化,并将其应用于寿命预测中.
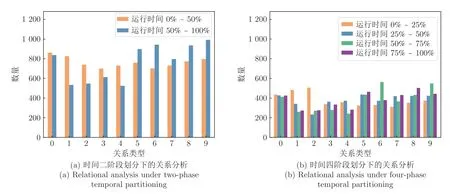
图6 FD004 229 号发动机单元关联依赖分析Fig.6 Association dependence analysis of unit 229 engine on FD004
综上,本文所提MSTKG 方法能够充分利用传感器节点状态关联关系及其演变情况,发现设备不同部件的退化情况,支撑RUL 预测,其精度在复杂工况下优于现有最佳方案.
3.6 参数分析
最后,测试并分析不同参数设置下预测模型的性能变化.具体地,以FD004 数据子集为对象,分别测试不同时间窗口长度(即单个窗口包含的感知数据序列长度)、相邻时间窗口的数据跨度以及时间窗口个数3 个参数对模型性能的影响,测试结果如表6 所示.可见,不同的参数设置会对模型的预测性能产生一定的影响.例如增加窗口的个数,会造成模型性能的先升后降,即RMSE 从24.32 改进到21.37、20.86,随后退化到22.06.这表明模型的特征表示能力存在上限,引入过多的时间窗口会造成特征空间无法充分刻画时序特征,需要进一步扩充特征向量的维度.同时,当序列长度设置为1 时,模型的输入数据未蕴含足够的时序特征信息,进而使得模型性能出现明显的下降,这也验证了模型能够有效利用感知数据的时序特征信息.此外,通过第3组和第5 组参数的比较,可见增加窗口的长度或者增加相邻窗口间的感知数据跨度,均会导致模型预测性能的下降.
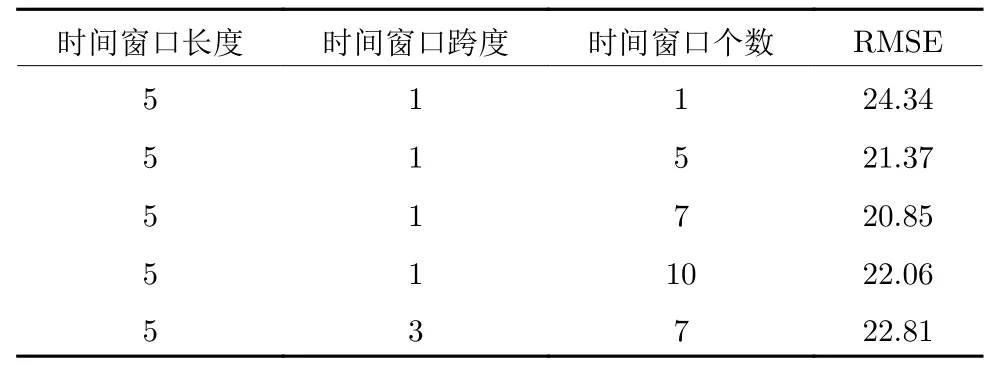
表6 不同参数设置的模型预测性能Table 6 Model prediction performance with different parameter settings
4 结论
本文提出了一种基于多变量分析的时序图推理模型的设备RUL 预测方法.该模型以设备各部分传感器节点的感知数据为输入,分别从传感器工作状态的关联及演化关系、传感器原始感知数据的变化趋势等角度,估计设备可以健康工作的剩余时长.模型首先将不同传感器的感知数据划入多个时间窗口,并针对每个窗口构建节点关联图,构成时序图序列.随后,采用图卷积神经网络学习传感器节点特征,并通过门控循环单元实现不同时间窗口间节点状态的传递.在预测部分,解码得到的时序图特征通过多层映射回归分析,预测其对应的RUL 估计值.基于基准数据的实验结果表明,所提出的模型能够提升预测的精度,特别是针对工况较复杂的设备.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
新世纪智能(数学备考)(2021年9期)2021-11-24
中国农业信息(2021年3期)2021-11-22
电子制作(2019年22期)2020-01-14
当代陕西(2019年15期)2019-09-02
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
学苑创造·A版(2018年11期)2018-02-01
电子制作(2017年13期)2017-12-15
读者(2017年5期)2017-02-15
