玉米播种机智能控制系统设计与试验
2024-02-03 03:11:00侯亚娟
农机使用与维修 2024年1期
侯亚娟
(焦作技师学院,河南 焦作 454000)
0 引言
玉米作为世界上重要的粮食作物之一,是一种多用途的作物,不仅为人类提供主要食物来源,还用于饲料、工业原料和生物能源的生产[1-3]。玉米在全球粮食供应中占有显著地位,在农业经济的可持续发展中起到了重要作用。
在传统玉米种植过程中,播种深度不均匀可能导致作物生长不一致,进而影响产量和质量[4]。此外,农民在操作传统播种机时人工劳动强度大[5-6]。劳动密集型农业生产不仅增加了劳动力成本,还会限制劳动力的吸纳,尤其是在一些地区,这可能导致农业生产规模和效率受到限制。
因此,基于PLC技术,设计一种玉米播种机电气控制系统,结合自动控制算法,进一步提高玉米播种机的作业效率,改善播种质量,并通过田间试验验证其有效性和可推广性。研究结果成为提高玉米播种机效率及产量提供新得发展思路。
1 总体设计方案
1.1 设计要求
玉米播种机相关行业标准对玉米播种作业要求如表1所示[7-8],玉米播种最佳间距通常为30~35 cm,间距合格率、漏播率和重播率的控制是确保播种精确性和效率的关键因素。合格的间距合格率表示绝大多数种子都被按照所需间距播种,而较低的漏播率和重播率则表明减少了种子的浪费和不均匀分布。这些要求有助于提高产量、降低生产成本,并促进玉米种植的可持续性。
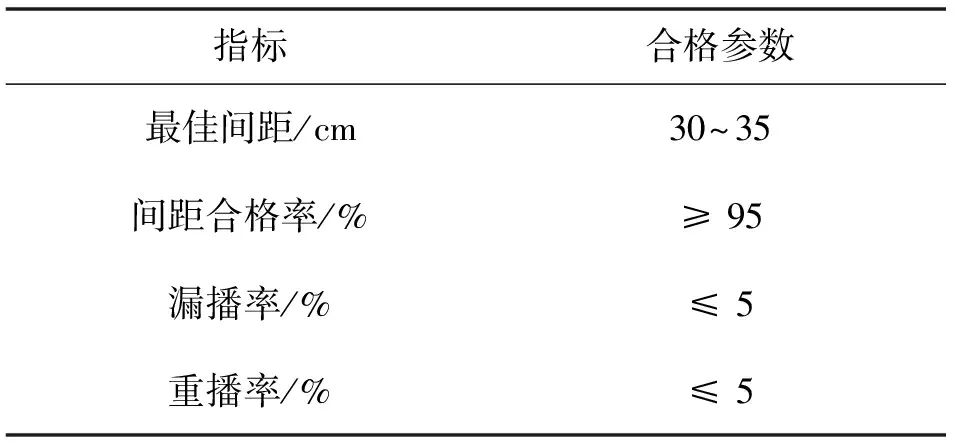
表1 玉米播种机性能指标
1.2 控制方案
针对玉米播种机控制要求,本文采用基于PLC技术的电气控制系统,主要分为玉米播种株距控制和振幅控制两个关键部分。
1.2.1 播种株距控制
播种株距是关键参数,直接控制玉米植株之间的间距,从而影响作物生长。在电气控制系统中,通过PLC技术自动调整播种机工作参数,实现所需的播种株距,同时,传感器可以监测播种株距,并将实时数据反馈给PLC控制器,以便及时调整和修正。主要控制原理如图1所示。

图1 基于PLC技术下玉米株距控制原理
1.2.2 播种振幅控制
振幅控制是确保种子均匀分布的关键因素,直接影响播种的均匀性和质量。在电气控制系统中,智能控制系统可以根据土壤特性和播种需求,自动调整播种机的振幅,以确保种子的均匀分布,同时,传感器可以实时监测振幅,并将数据反馈给PLC控制器,以便随时调整振幅参数,确保漏播率和重播率都控制在≤5%[9],控制原理如图2所示。

图2 基于PLC技术下玉米播种机振幅控制原理
2 硬件设计与选型
玉米播种机智能控制系统硬件部分以PLC为核心,通过采集工作速度、播种机振幅信息等完成对各个作业部分的控制,本文将硬件部分划分为主控系统、信息采集模块、报警电路模块。
2.1 主控系统
玉米播种机主控系统是智能控制系统的核心,负责监测、调整和协调各个部分,以确保播种机的正常运行和达到播种目标。主控系统负责收集来自各种传感器的数据,包括土壤特性、播种机状态、种子流量等信息,这些数据用于实时监测播种过程,并作为基础数据用于后续的控制决策;控制算法用于分析传感器数据、计算目标参数(如株距、振幅等)并制定控制策略,同时考虑土壤条件、作物需求和其他因素,以优化播种结果。主控系统通过执行器控制播种机各个部分,以调整播种株距、振幅和其他参数。可实时监测播种过程,并根据传感器反馈的信息不断调整播种机的操作,确保播种精确性和一致性,主控系统会提供友好的用户界面,使操作员能够监控播种机的状态,设置参数并进行故障排除。主控系统负责记录播种过程的数据,包括播种数量、株距、振幅和其他关键参数,以便用于后续分析、报告和管理,自动化功能允许播种机在不需要人工干预的情况下自主进行操作,以提高生产效率并减轻操作员的工作负担。
S7-200是西门子(Siemens)公司生产的一款PLC控制器,广泛用于工业自动化和控制系统中,具有稳定性高、可靠性好、性能优越以及丰富的通信和扩展能力等特点,适用于各种自动化控制应用。因此,本文选择西门子S7-200作为主处理器[10]。
2.2 信息采集模块
信息采集模块允许控制系统实时监测和处理来自不同传感器和设备的信息,以支持自动控制和决策,通常与PLC、SCADA系统或其他控制器一起使用,用于实现数据采集和处理的功能。本研究信息采集模块传感器类型、布置方案及物理连接方式如表2所示。
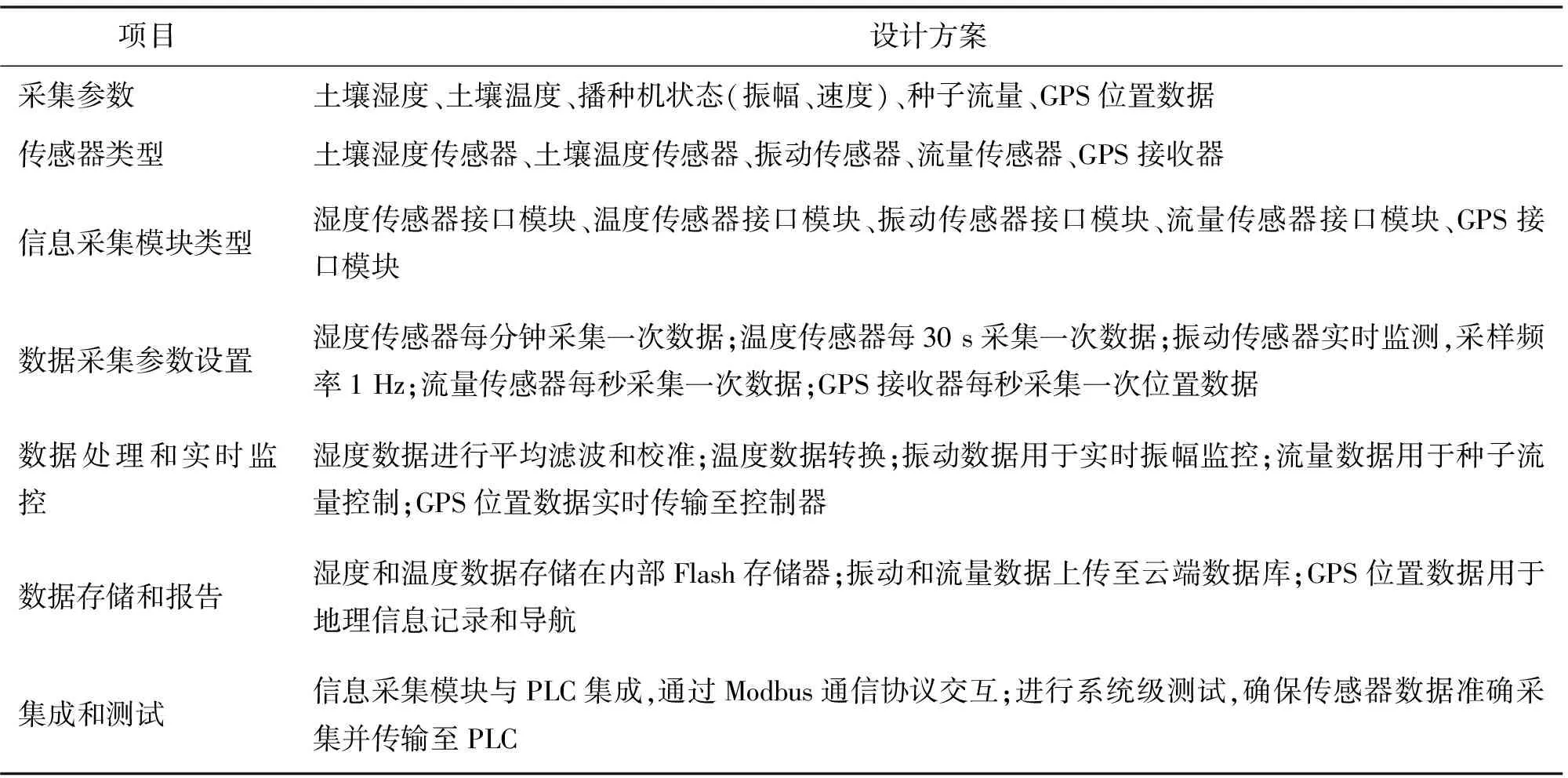
表2 基于PLC玉米播种机信息采集模块的设计
2.3 报警电路模块
报警电路模块是玉米播种机智能控制系统中重要的一部分,用于监测和报警关键事件或异常情况。电路设计关键技术如表3所示。
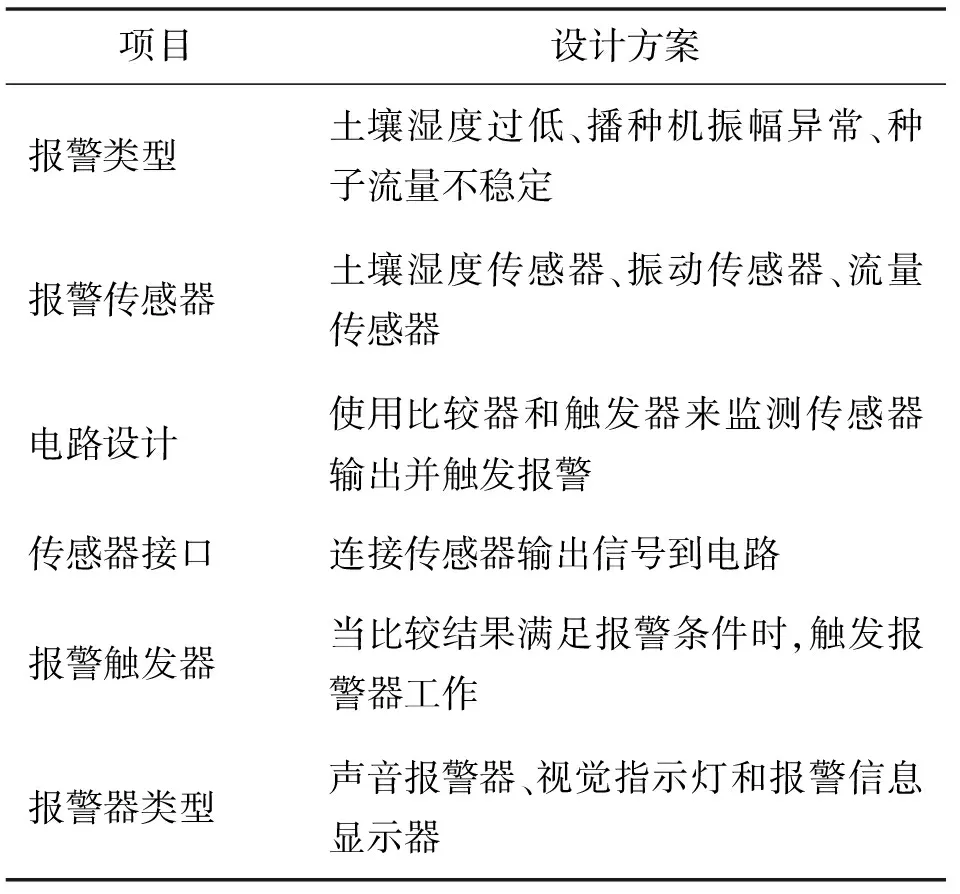
表3 报警电路设计方案
3 自动控制算法的实现
本文使用Python的matplotlib库编写控制算法程序,结果在控制显示台进行显示,控制算法控制逻辑和操作代码如下,“record_state”用于记录每个时间步的播种机状态,然后plot_results使用“matplotlib库”在控制台中绘制图形,表示电机速度和播种机状态的变化。播种机的状态通过时间的步骤进行记录,最后在程序运行结束后,调用plot_results来显示图形。
3 自动控制算法的实现
本文使用Python的matplotlib库编写控制算法程序,结果在控制显示台进行显示,控制算法控制逻辑和操作代码如下,“record_state”用于记录每个时间步的播种机状态,然后plot_results使用“matplotlib库”在控制台中绘制图形,表示电机速度和播种机状态的变化。播种机的状态通过时间的步骤进行记录,最后在程序运行结束后,调用plot_results来显示图形。
import time
import matplotlib.pyplot as plt
class CornSeeder:
def __init__(self):
self.motor_speed = 0
self.seed_dispenser = False
def start_motor(self,speed):
print(f"启动电机,速度:{speed}")
self.motor_speed = speed
def stop_motor(self):
print("停止电机")
self.motor_speed = 0
def dispense_seed(self):
print("播种")
self.seed_dispenser = True
def stop_dispenser(self):
print("停止播种")
self.seed_dispenser = False
class ControlSystem:
def __init__(self,seeder):
self.seeder = seeder
self.time_steps =[]
self.motor_speeds =[]
self.seed_dispenser_status =[]
def record_state(self,time_step):
self.time_steps.append(time_step)
self.motor_speeds.append(self.seeder.motor_speed)
self.seed_dispenser_status.append(self.seeder.seed_dispenser)
def plot_results(self):
plt.figure(figsize=(10,5))
plt.subplot(2,1,1)
plt.plot(self.time_steps,self.motor_speeds,label='Motor Speed')
plt.xlabel('Time (s)')
plt.ylabel('Motor Speed')
plt.legend()
plt.subplot(2,1,2)
2000级曼巴扎仓第一届医学生久麦多杰,32岁,梳着一个略显花白的小辫子,他在共和县开了一家藏医诊所,当曼巴扎仓的病人太多时他就回来分担活佛压力。他回顾10年的学医生涯时说:
plt.step(self.time_steps,self.seed_dispenser_status,where='post',label='Seed Dispenser')
plt.xlabel('Time (s)')
plt.ylabel('Seed Dispenser Status')
plt.legend()
plt.tight_layout()
plt.show()
def run(self):
print("启动播种机控制系统")
self.seeder.start_motor(100)
self.record_state(0)
time.sleep(2)
# 模拟播种过程
self.seeder.dispense_seed()
self.record_state(2)
time.sleep(5)
self.seeder.stop_dispenser()
self.record_state(7)
# 停止播种机
self.seeder.stop_motor()
self.record_state(12)
print("播种机控制系统停止")
self.plot_results()
# 实例化播种机和控制系统
seeder = CornSeeder()
control_system = ControlSystem(seeder)
# 运行控制系统
control_system.run()
-结束播种操作
4 田间试验
基于电气自动化的玉米播种机智能控制系统性能测试结果如表4所示,表明系统能够满足设计和性能要求,具备高度的稳定性和可靠性,以确保高效的播种操作。
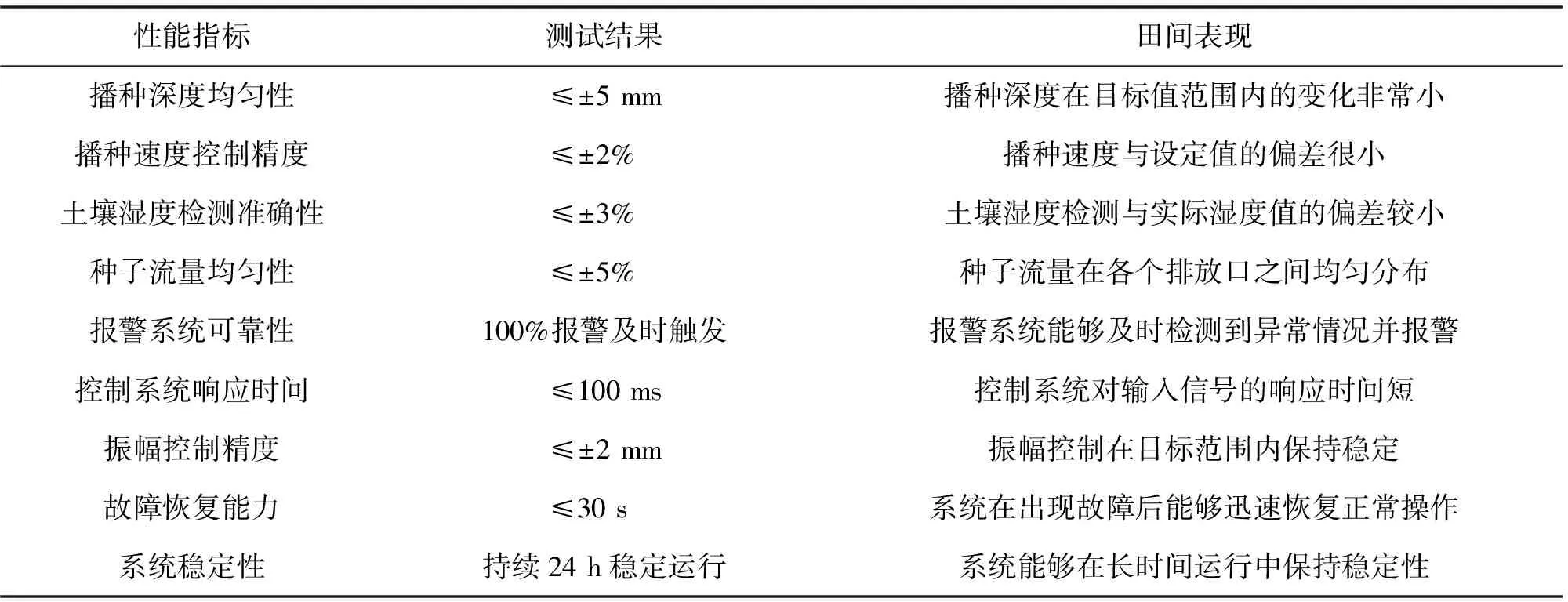
表4 性能测试结果
5 结论
通过对传统玉米播种机存在的播种深度不均匀、人工劳动强度大等问题的分析,本文提出了一种基于电气自动化技术的玉米智能播种机控制方案,该方案采用了传感器技术、嵌入式系统和自动化控制算法,以改善播种机的性能和效率。选择西门子S7-200PLC控制器作为核心控制单元,配备了各种传感器和执行器,以实现对播种深度、播种速度、土壤湿度、种子流量和振幅等参数的智能控制。
性能测试结果表明,玉米播种机智能控制系统在播种深度均匀性、控制精度、湿度检测准确性、流量均匀性、报警可靠性、响应时间、振幅控制等关键性能方面表现出色。系统不仅提高了播种机的自动化水平,还减轻了农民的劳动负担,从而提高了玉米生产的质量和效率。
猜你喜欢
农业与技术(2022年9期)2022-05-17 07:45:48
农机质量与监督(2021年5期)2021-07-02 09:26:20
今日农业(2020年22期)2020-12-14 16:45:58
农民致富之友(2017年12期)2018-01-31 19:54:33
制造技术与机床(2017年6期)2018-01-19 02:41:07
学苑创造·B版(2015年12期)2016-06-23 09:36:36
雷锋(2016年4期)2016-05-30 02:09:48
学习月刊(2015年10期)2015-07-09 03:35:12
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54