基于多传感信息融合的高速公路机电设备智能运维监控方法
2024-02-02 13:26牛朋超
交通工程 2024年1期
牛朋超
(中南勘察设计院集团有限公司, 武汉 430073)
0 引言
我国的土地面积非常宽广,因此电力基础设备的分布范围也相对较广. 目前,电力行业中的基础设备与设施在行业中基本上实现了全覆盖,要想实现对其进行远程监控、统一管理,就需要大量的人力、物力与财力. 在对电力系统进行建设的过程中,机电设备的智能化、信息化已经成为电力系统在未来发展的必然结果. 针对机电设备进行智能运维监控是保证电力网络正常运行的基本环节. 因此,国内有相关专业领域的学者针对机电设备设计了对应的监控方法.
郭东明[1]提出基于CAN总线的变电所过程层设备运行状态智能监控方法. 利用CAN信息采集卡采集设备运行数据,计算CAN总线通信波特率,引入BP神经网络模型对运行数据进行深入挖掘,实现对变电所过程层设备运行状态的智能监控. 虽然该方法能对机电设备进行有效监控,但是监控过程中消耗的能量较多,性能还有待提高. 江子立[2]提出了基于物联网技术的高速公路机电设备用电异常监测方法,构建参数共享模型,通过用电数据质量分析方法分析传感器采集数据,通过物联网技术建立监测中心对机电设备用电异常变化记性监测. 虽然该方法的监测结果较为准确,但是由于算法复杂,增加了整体的监控的时延,在监控的实时性上还有一定的进步空间.
智能的运行维护监控系统,不仅能提升整个系统的安全性、稳定性与可靠性,而且可在减少人力所带来负担的同时,也减少了管理成本. 为了能让高速公路机电设备运行维护监控系统中智能化的程度得以提升,就需要在多传感信息融合的基础上,实现对机电设备的智能运维监控. 为此,本文提出基于多传感信息融合的高速公路机电设备智能运维监控方法. 对现场机电设备产生的数据进行实时地传输感应,将所得到的数据信息进行有效融合,及时并准确地发现机电设备存在的问题与隐患,掌握现场状况,并及时通知运维部门进行处理,保障高速公路机电设备运行安全.
1 挖掘机电设备中多传感器信息数据
采用多种不同类型的传感器装置,对高速公路机电设备运行过程中的状态信息进行采集,其中包括光纤测温传感器、电流传感器、SF6气体传感器、振动传感器.
光纤测温传感器型号为SR-C2022,分辨率0.1 ℃,测量精度±1%℃,1~32路多通道测温,测量范围-40~200.0 ℃. 电流传感器型号为ACS712ELCTR-30A-T,灵敏度66 mV/A,精度±1.5%,线性度±1.5%,响应时间5 μs,电源电压5 V. SF6气体传感器型号为SC-10,精度SF6≤5%FS,电源电压9~24 V,工作电流≤50 mA,浓度报警点≥1 000ppm,波特率2 400 bit/s,抗电强度>2 000 V. 振动传感器型号为TX9,灵敏度50 mV/mm/s±5%,频率响应(0~25)kHz,测量间距0~4.0 mm,电源电压5~24 V.
为了提高机电设备运行数据传输的实时性,本文选取BC-S5单向光纤光栅应变计作为无线传感装置,实现传感数据的实时传输. 该传感器量程能达到±5 000με,在对高速公路机电设备运行状态进行监控的过程中,能实现更大量程和更大范围数据的采集,并且有效提高数据采集精度.
在实现多传感器联网监控与实时反馈的工作流程中,网站的建设和维护工作一般是由VPN服务来承担的,其内部的管理程序则是先使用经过审计的数据库、工作流程中的行为日志和管理接口来收集传感器信号,然后再使用WebUI对其进行激活、修改和后续管理,对多个传感器产生的信号做出精确分类. 系统内所有传感器的信息数据,都可通过多维度数据来实现收集,并通过CACTI的周期性实现对历史数据和当前信息的监测数据之间的比较. 根据收集到的信息,如果收集到的信息在不在阈值范围内,就可触发报警系统,把不在阈值内的数据及时传递给系统管理者.
想要使机电设备实际反映出来的数据能更为精确,就必须对所监控的数据信号进行更为深入的发掘,现有的挖掘方法较多,包括回归分析、关联规则、多尺度分析等. 回归方法在分析多因素模型时比较便捷,但是可能会受到因子的不确定性的影响而降低数据分析的准确性. 关联规则可计算间接数据之间的关联,实现数据挖掘的目的,但是对于较为稀有的数据可能会出现自动忽略的情况. 多尺度的分析,主要是从小波函数中二进制的伸缩和平移来描述它所反映出来的函数思想,而把研究重点放到处理整个函数思想的子空间中. 因此,本文采用多尺度分析对机电设备实际反映的数据进行更深入发掘.
将K2(E)、Ch和Qh设置为机电设备进行运维监控过程中,实时反映出的平方可积函数空间中的子空间,其中h∈Z,Z代表着平方可积函数空间,Ch代表该函数空间中所包含的尺度空间,Qh代表该函数空间中所包含的小波空间[3-4].其中逼近空间也可用Ch来表示.而小波空间中就能用于描述Ch与Ch-1之间产生的数据差异.可用φ(r)描述多种传感器采集数据信息中的平滑函数,φh0(r)表示将其平滑操作到h之后对其进行数据挖掘的函数,而j代表着已有传感数据尺度变化过程中所产生的平移且j,h∈Z.
将多尺度的分析方法作为此次研究的基础理论,再通过小波分解以及快速构成算法,对所采集的多传感数据进行重新构成[5].d(r)代表所有输入信息的函数关系,Lh代表尺度空间Chj中内部权重的系数,如果符合了Lhd(r)∈Ch相应关系时,就能得出如下关系:
(1)
式中,xn(h)为尺度空间内部的最大权重系数;φhn(r)为进在进行了尺度与位移变换之后的最大函数关系,并且当h=0时,则就会满足:
(2)
式中,L0d(r)为逼近尺度函数方向上产生的最大信号;xn(0)为在线性组合过程中产生的最大权重,这样就一定会使xn(0)=〈L0d(r),φ0n(r)〉.通过上面的关系说明,在尺度空间中h=0时,其最小波函数满足了离散状态下的无限逼近,那就得:
xn(1)=〈L0d(r)-V1d(r),φ1n(r)〉
(3)
式中,V1为小波空间内部权重的系数.
当满足h→0时,可得到关于尺度空间的平滑信息以及关于小波空间的离散信息[6-7].利用多传感器的网络学习方式对已有多传感数据信息进行挖掘的过程中,因为存在Ch-1=Ch⊕Qh,那么就可获取被挖掘出的多传感数据:
Ch-1d(r)=Lhd(r)+Vhd(r)
(4)
式中,当h→∞时,就可获取挖掘后的多传感数据信息,实现高速公路机电设备中多传感器信息数据的完整采集.
2 多传感数据信息融合
在获取多传感器采集的高速公路机电设备运行数据后,对传感器中所输出的数值进行特征提取和转换,实现多传感数据信息融合.首先根据相同的数据信息进行分类并形成关联,然后计算多传感数据校正因子和修正后的权重,最后通过加权融合算法对所有机电设备的传感器信息进行融合.
对数据类型进行分组,根据每组数据的平均值p1、标准差p2,计算融合权值p3:
(5)
式中,v为需要融合的多传感数据总量.根据得到的多传感数据融合权值,计算各组数据的校正因子和修正权重:
(6)
(7)
式中,g1为校正因子;gp为修正权重;go为相对方差;gy为特征矢量.
采用修正后的权重gp,结合校正因子g1,对多传感数据进行二次加权融合,得到最终的融合结果po:
(8)
至此,通过加权算法实现了高速公路机电设备多传感数据的融合.
在多传感信息融合对数据进行处理的过程中,会存在非常多不同的层次,通过多传感数据整合的每个阶段都可看出,每个局部数据整合空间内,都可通过任务自定义的启动来确认不同的管理信息,其中在任务协调的子系统中,可对整合实施阶段前的信息和整合后的信息实现有效管理;在实施具体任务的阶段流程中,实现具体任务协同功能的子系统也能实现数据信息的共享、通信数据的协同、冲突数据的解决等;具有全局功能的信息中心,通过对局部信息与空间资源进行集成后得到结果,主要体现的层次就是在信息发布的层级中,但在实际操作的实践中,管理与决策都是由整个网络的管理者来完成的[8]. 因此将多传感信息融合后,可提高管理者对高速公路机电设备运行状态的监控效率,有利于下一步工作的开展.
3 多传感融合下智能优化运维监控
在完成多传感器数据信息融合后可开展进行对应的运维工作. 实施集中地监测并实现方案性的解决,如此才可更准确和有效地掌握设备的实际工作状况,并找出运行中的机电设备存在哪些问题,及时进行检修,保障机电设备的安全运行[9].
可结合云计算技术,构建以多传感数据为基础的,集设备运行状态管理、控制、诊断、告警、分析等功能于一体化智能运维监控平台,能监控外接设备的实时电压、流量、功率状态、通讯情况,一旦发生运行异常或故障等情况,可实现及时告警[10]. 通过获取的多传感数据,快速获取高速公路各个机电设备的运行状态,从中识别出异常状态信息,发出检修告警,通知维修部门快速到达告警点位的设备处,检查设备运行情况和异常情况,实现快速抢修.
一体化智能运维监控平台能实现对高速公路各隧道、收费站、线路的机电设备运行的实时监控,通过集中监测、事故预报、问题分析、及时排障,保证高速公路机电设备运行安全,提升运维工作质量,减少管理运维时间. 提高机电设备的在线率、安全性的同时,减少因设备损坏带来的经济损失,避免受设备故障影响而出现交通拥堵、高速公路滞留等情况. 智能运维箱能准确判断故障原因并通过后备电源和后备无线传输及时上传监控中心通知运维人员处理,可降低整体运维成本,提高维护工作效率,有利于维护工作的系统化和规范化管理[11].
4 应用测试与分析
为了测试此次提出高速公路机电设备智能运维监控方法的可靠程度和实际使用效果,选择某高速公路的机电设备作为测试对象,代替实际高速公路机电设备,降低应用测试风险. 使用Intel P6 8G处理器,将MATLAB 2020a作为此次测试的模拟平台,本次测试将本文的方法与两种传统方法(CAN总线技术与物联网技术)进行对比测试,对不同方法下监控实时反馈的及时性与能耗进行比较,具体变化曲线如图1和图2所示.
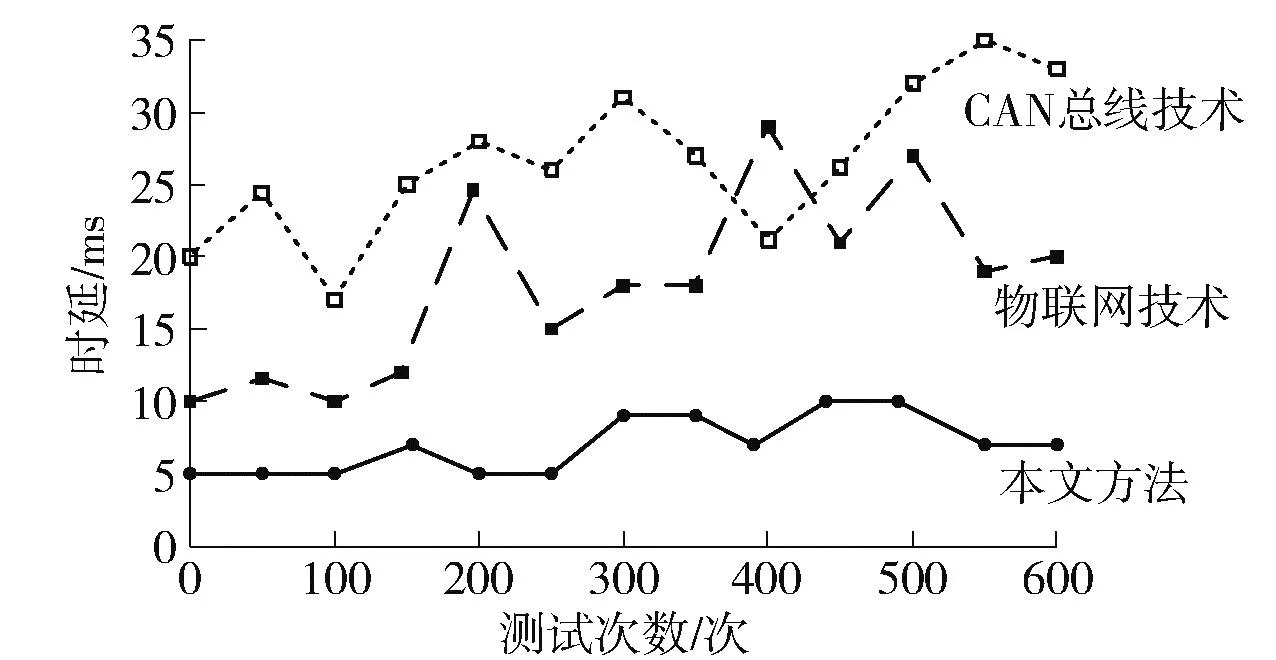
图1 不同方法下监控实时反馈时延对比结果
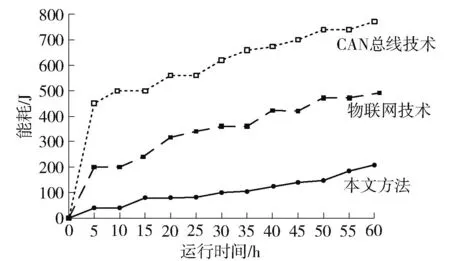
图2 不同方法下监控实时反馈能耗对比结果
由图1和图2可看出:基于CAN总线技术的运维监控方法,当测试次数在0~600次时,时延范围为17~34 s之间,平均时延为26 s;当运行时间为5 h时,其能耗就已经达到450 J,而当运行时间为60 h时,其能耗就已经达到770 J. 基于物联网技术的运维监控方法,当测试次数在0~600次时,时延范围在10~28 s之间,平均时延为17.62 s;当运行时间为5 h时,其能耗为200 J,而当运行时间为60 h时,其能耗达到440 J. 而基于多传感信息融合的运维监控方法,当测试次数在0~600次时,时延范围只维持在5~12 s之间,平均时延却只有8 s;当运行时间为5 h时,其能耗只有45 J,而当运行时间为60 h时,其能耗达到最高却只有180 J. 综上所述,本文方法不论是监控实时反馈的及时性还是能耗,都远远优于2种传统方法,证明设计方法具有较好的实用性.
因此将本文设计方法应用至武阳高速金山段中,应用时间为2022-04-01—06-30. 在此期间,用设计的方法对高速公路机电设备进行监控,监测出2次机电设备的异常运行,分别为设备高温运行和设备电流异常,两次实时反馈的时延都在6 s左右,并及时发出故障预警,通知维修人员迅速到场处理. 从发出预警至维修结束仅用时1.2 h,实际应用效果较好.
5 结束语
针对传统机电设备智能运维监控方法在进行日常运维时,存在人力消耗大,遇到突发事件无法及时处理,造成财产损失的问题,提出采用多传感信息融合的基础优化高速公路机电设备智能运维监控方法. 实验结果表明,本文方法在对高速公路机电设备进行智能运维监控时,当测试次数在0~600次时,时延范围只维持在5~12 s,平均时延只有8 s;当运行时间为5 h时,其能耗只有45 J,而当运行时间为60 h时,其能耗达到最高却只有180 J,比较适用于当今时代下机电设备的智能运维监控.
猜你喜欢
中国交通信息化(2024年1期)2024-03-28
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年11期)2021-07-28
中国交通信息化(2019年5期)2019-08-30
经济技术协作信息(2018年8期)2019-01-14
能源(2018年8期)2018-09-21
能源(2017年11期)2017-12-13
现代工业经济和信息化(2016年8期)2016-05-17