
水轮机调速器控制方法一次调频性能分析
2024-02-01 06:29程远楚普碧才蔡天富肖惠民
水电站机电技术 2024年1期
程远楚,普碧才,蔡天富,肖惠民
(1.武汉大学动力与机械学院,湖北 武汉 430072;2.云南电网有限责任公司怒江供电局,云南 泸水 673100)
水电机组是电力系统重要的可调节电源,水电机组应根据电网调度要求和电网频率变化情况,及时快速地调整水电机组的输出功率,以满足电网有功功率平衡和频率调节的需要。为评价水电机组的调频性能,在《水轮机调节系统并网运行技术导则》[1]和各电网调度部门的两个细则中,对AGC的目标功率与调节速度、一次调频的响应速度与目标功率、一次调频积分电量均给出了详细的考核要求。为了提高水电机组的调节性能与调频能力,对水轮机调速器的调节模式、控制算法、参数优化等方面开展了大量的研究[2-5]。甄文喜 等[6]探讨了基于“两个细则”考核下的水电机组一次调频与AGC调节性能提升方法。马睿 等[7]提出了在监控系统中采用一次调频功率叠加的方法来协调一次调频与AGC的矛盾。马小雯 等[8]采用变参数的方法来解决功率调节模式下不同水头的参数适应性问题。张培 等[9]采用前馈控制方法来提高提高积分电量的贡献率,减少一次调频被考核情况的发生。罗倚天等[10]通过分析功率-频率综合控制的动态调节特性,提出了一种具有参考模型的功率-频率的控制方法。胡翔 等[11]讨论了异步互联送端电网中水电机组调速器PID参数的整定问题。以上研究均在一定程度上了提高水电机组的一次调频性能。
根据水电机组并网运行导则与各区域电网“两个细则”的要求,容量10 MW及以上的水电机组均需经过有关涉网试验单位检验合格后才能并入电网运行。但由于水轮机的非线性特性、水电站引水系统的惯性与压力脉动,在实际电站中大量经一次调频试验合格的水电机组存在并网运行中一次调频考核指标不合格的现象。为分析其形成的原因,本文通过建立与真实机组特性相符的非线性模型,分析不同水轮机调速器控制方法对一次调频性能的影响。
1 水轮机调速器常用控制方法
通常水轮机调速器的控制逻辑框图如图1所示。其有频率调节模式、开度调节模式、功率调节模式三种调节模式。空载时通常采用频率调节模式,此时,模式选择开关S切向上方。频率死区设为0,bP取较小值,以保证机组频率f与频率给定Cf的跟踪精度。并网运行时采用开度调节模式和功率调节模式。

图1 通用水轮机调速器控制框图
1.1 开度调节模式
模式选择开关S切向上方时为开度调节模式。由于积分环节的存在,当调节稳定时,有:
式中:
这里,Cf为频率给定值,f为机组频率,Cy为导叶开度给定值,yc为调速器控制输出,e1为经频率人工死区后的控制误差,df为频率死区设定值,bP为永态差值系数。上述各量均为相对值,后面所述各量类同。
开度调节模式以开度为反馈控制量,而水轮机输出功率不仅与导叶开度 (通过转轮的水流流量Q)有关,还与水轮机的工作水头H有关,当水头不同时,相同开度下机组的实际输出功率不同。简化的水轮机数学模型可表示(以水轮机力矩特性简化代表机组功率特性):
由于水轮机的非线性,随着工况点变化,其ey会发生变化。即不同的工况点,相同的开度变化导致的功率变化不同。因此,导致机组输出功率不能与AGC设定的功率一致。
1.2 功率调节模式
如图1,当模式选择开关S切至下方时为功率调节模式。该模式下监控系统只需下发功率给定值CP,调速器接受下发的功率设定值后,由调速器根据发电机有功功率反馈P进行调整,直到机组有功功率达到给定值。在该模式下,由调速器自动完成功率闭环调节,具有调节性能好并且能够实现一次调频与AGC协调控制的优点。
由式(3)可知,在不同的工况点,要改变相同的功率,所需的开度变化量不一样。这样就导致PID控制参数难以整定。当水头变化或导叶开度变化时相同PID调节参数的AGC和一次调频动态过程差异[8]。为了取得较好的一次调频效果,需根据运行工况的不同采用不同的PID控制参数。
此外,由于水压脉动等因素的存在,当导叶开度不变时,机组功率P会在一定范围内波动,为避免频繁的不必要调节,如图1所示,设置有功率调节死区dP。
对于图1所示的功率调节,由于积分环节的存在,当调节稳定时,有:
即当电网频率变化超过一次调频死区范围,有频率差e1存在时,若CP=P,e1/eP值小于功率死区设定值时(eP为功率差值系数),水电机组不会参与一次调频。最严重情况是当CP=P+dP,e1<0时,此时e1/eP幅值需小于2倍dP时才会参与一次调频。这样就会出现小频差下一次调频不动作或积分电量不够的情况。
2 水轮机调速器改进控制方法
为了改善水电机组的一次调频特性,多种改进控制方法被提出。本节介绍两种方法。
2.1 功率前馈控制方法
使不同运行工况均具有较好的调节性能,功率前馈控制方法被提出,并在部分电站得到了应用[10]。该方法实质是一种变前馈+反馈控制的调节模式,如图2所示。

图2 变前馈的功率调节模式控制框图
在新的调节模式中,当电网频率与给定频率的差值超过一次调频死区时,将当前频差折算成理论调节目标功率,与AGC下发的给定功率综合进行功率调节。由于一次调频与AGC采用同一控制器且为相同的调节过程,因此,AGC与一次调频可以共用一组参数,使得AGC和一次调频均有较好的动静态特性。此外,由于功率前馈的作用,其具有对不同水头与不同开度输出不同控制量的作用,即具有非线性调节作用。使得PID控制参数对工况变化的敏感性降低,采用固定的PID控制参数即可满足不同运行工况下的AGC和一次调频考核性能要求。
在该方法中,前馈控制为主导控制,根据当前运行水头和目标功率,依据水电机组的功率特性计算出当前的所应对应的接力器行程,直接用于控制输出。其能保证不同工况下均具有较快的调整速度和较小的超调。由于前馈控制为开环控制,为提高控制的稳态精度,引入反馈控制来校正稳态误差。当前馈控制较为精准时,反馈控制仅需进行少量的校正控制。为避免反馈控制与前馈控制叠加导致出现过大的超调,反馈控制的积分系数应取较小的值。
2.2 功率与开度双PID控制方法
根据开度调节模式和功率调节模式各自的优缺点,本文提出了一种功率与开度的双PID控制方法。其控制框图如图3。
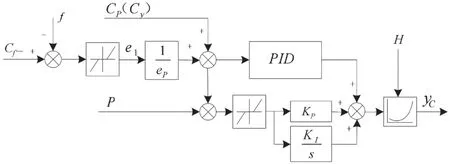
图3 功率与开度双PID控制框图
与图2所示的控制方法相比,采用开度PID控制代替了变前馈控制,可通过PID控制参数有效地提高控制系统的稳定。此外,为了改善开度控制时功率控制不精准的问题,在控制器输出增加了一个工况自适应环节,该环节应根据不同的机组特性进行相应设置。
在该调节模式下,调速器输出量yc为开度(位置)PID与功率PI控制的综合,其中以开度(位置)PID控制为主。当位置PID控制较为精准时,功率PI基本不参与控制。只有当位置PID控制有一定误差时,功率PI才参与控制以提高功率的调节精度。从图3可以看出当有频率差e1存在时,必会有相应的一次调频控制输出存在。
3 验证分析平台
为验证本文方法的正确性与有效性,基于某电站700 MW混流式水轮机搭建了仿真分析平台。
水轮机采用非线性模型:
水轮机单位流量单位力矩特性如图4。
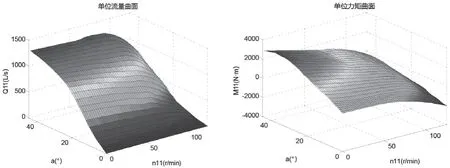
图4 水轮机单位流量和单位力矩特性
其中:n11=,由此,可计算出水轮机流量和水轮机力矩。
对于分析的电站,水轮机的额定力矩M11r=1 262.8 N·m,额定单位流量Q11r=1.167 3 m3/s,水轮机额定单位转速n11r=74.377 6 r/min。
所分析电站为坝后式电站,引水系统采用刚性水击数学模型,Tw=2.32 s。
随动系统采用两阶惯性环节,考虑接力器的分段关闭与分段开启速度特性。其中:接力器全程开启时间这65 s,第一段关闭时间为7.82 s,接力器从100%关到第一转折点73.73%(对应导叶开度为71.31%)用时2.2 s;第二段关闭时间为51.5 s,接力器从第一转折点73.73%(对应导叶开度为71.31%)关到第二转折点5%(对应导叶开度为2.961%)用时35.39 s;第三段关闭时间为80.92 s,接力器从第二转折点5%(对应导叶开度为2.961%)到0用时5.28 s。
4 不同控制方法的一次调频性能分析
《水轮机调节系统并网运行技术导则》及各区域电网的发电厂并网运行管理实施细则对水电机组一次调频给出了具体规定,主要考核指标有:①响应速度:自频差超出一次调频死区开始至有功功率达到90%目标值的上升时间不大于15 s。②调整幅度:在电网频率变化超过机组一次调频死区开始至60 s或至频率变化回到一次调频死区时止,机组实际出力与响应目标偏差的平均值应在理论调整负荷最大值的±25%内。③贡献电量:在电网频率变化超过机组一次调频死区开始~60 s或至频率变化回到一次调频死区时止,机组一次调频的实际加权积分电量与理论积分电量之比满足考核要求。
为了分析不同控制方法的一次调频性能,分两种情况进行了仿真分析。
4.1 电站水头变化时的一次调频性能
取电站水头为90 m,机组负荷为80%,频差取0.1 Hz和-0.1 Hz进行一次调频试验,eP=4%。对于开度模式,由于对应工况下ey值较大,按一次调频调节功率与理论调节功率相近取bP=7%。由于不同控制方法时PID调节参数对一次调频动态响应过程的影响不同,为保持比较的客观性,按自频差超出一次调频死区开始至有功功率达到90%稳态值的上升时间为10 s整定各控制方法的调节参数。不同控制方法的一次调频性能指标如表1所示。表中:YPID为开度调节模式,PPID为功率调节模式,FPID为前馈+反馈控制方法,DPID为开度与功率双PID控制方法。不同控制方法下的一次调频动态过程如图5。频率下降时,功率调节模式的一次调频功率未达到理论目标功率的90%,故表1中未给出响应时间。
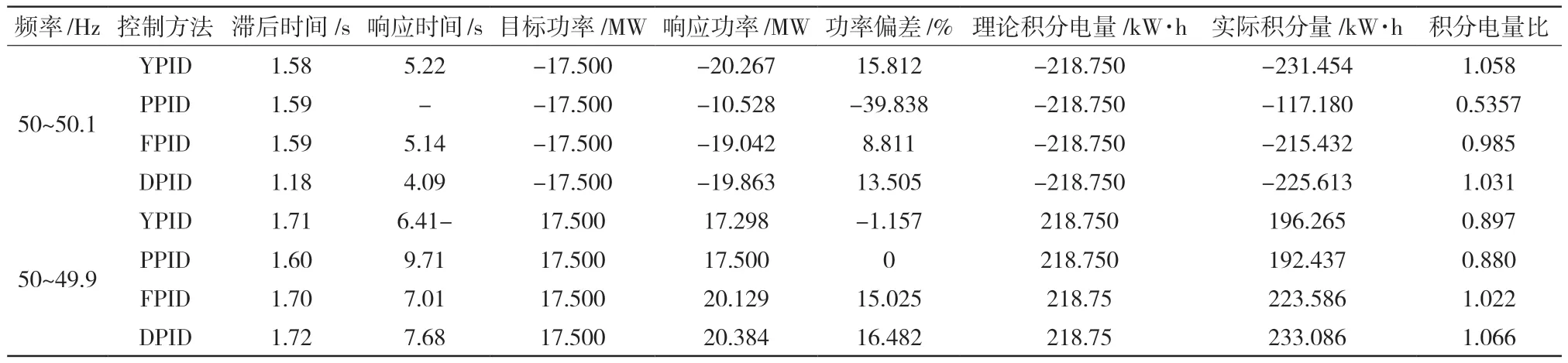
表1 90 m水头时不同控制方法的一次调频性能指标
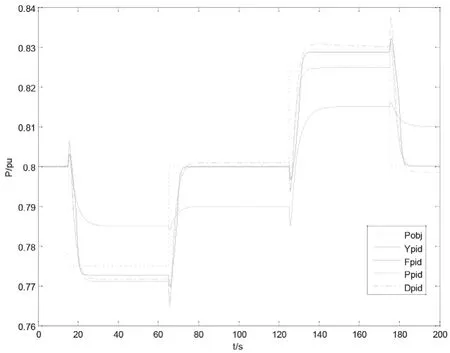
图5 90 m水头时不同控制方法一次调频过程
扰动情况不变,控制参数不变,电站水头为75 m时和电站水头为110 m时不同控制方法的一次调频性能指标分别如表2和表3所示。

表2 75 m水头时不同控制方法的一次调频性能指标
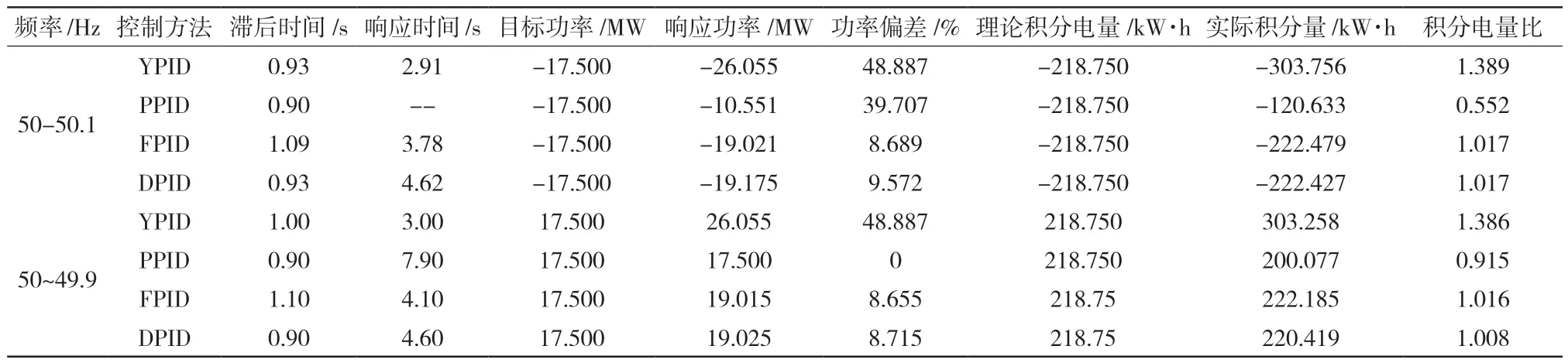
表3 110 m水头时不同控制方法的一次调频性能指标
当水头为75 m时,开度调节模式与功率调节模式的一次调频功率未达到理论调节功率的90%,积分电量与功率调节偏差均不合格。当水头为110 m时,功率调节模式与开度调节模式的功率调节偏差不合格,开度调节模式的积分电量合格,但功率调节量过大。
4.2 频差不同时的一次调频性能分析
为检验新调节模式在小频差下一次调频的性能,进行了频差为0.055 Hz、0.075 Hz时不同控制方法的一次调频试验。试验水头为90 m,机组初始功率为80%,功率死区为1%,其它参数与上一小节相同。
0.055 Hz时的试验结果如表4,0.075 Hz时的试验结果如表5。

表4 频差0.055 Hz时不同控制方法的一次调频性能指标
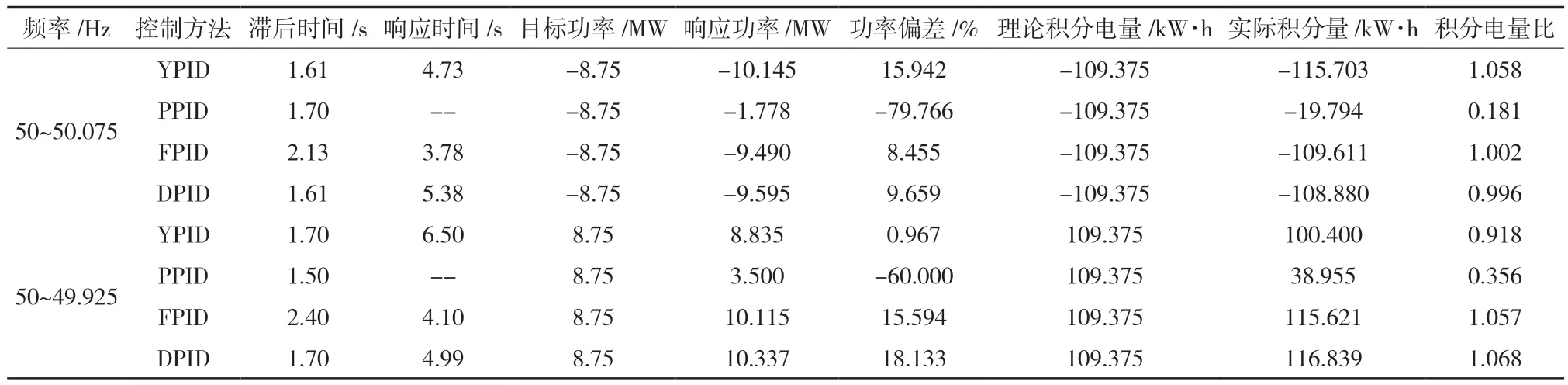
表5 频差0.075 Hz时不同控制方法的一次调频性能指标
从表4和表5可知,对于功率调节模式,频差越小,功率响应比和积分电量贡献比越小,甚至无响应。而其它控制方法对不同频差时的功率响应比和积分电量贡献比基本一致。但当频差较小时,理论调整负荷最大值较小,此时,机组实际出力与响应目标偏差较小,按理论调整负荷最大值作为基本值计算的功率调节偏差可能超出±25%的范围。
5 结论
通过对比分析,有如下结论:
(1)开度调节方式在各种频率偏差的情况下,均能快速调节。但随着水头等运行工况的变化,调节量可能偏大,积分电量合格,但功率调节偏差不合格。也可能调节量过小,导致积分电量与功率调节偏差不合格。
(2)功率调节模式下,由于功率死区的存在,会使一次调频的功率调节量不足。当频差较小时,一次调频可能不动作或调节功率偏小,导致功率调节偏差过大和积分电量不合格。
(3)变前馈加反馈的功率控制方法和开度与功率双PID控制方法能适应运行工况的变化,在不同运行水头和不同系统频差的情况下,一次调频性能指标均合格。
(4)计算调整幅度的偏差时,应取相对固定的基准值,不能按理论调整负荷最大值作为基准进行计算。否则,当频差较小,理论调整负荷最大值较小时,可能会误考核。
猜你喜欢
大电机技术(2022年3期)2022-08-06
小水电(2021年6期)2021-12-15
能源工程(2021年5期)2021-11-20
大电机技术(2021年3期)2021-07-16
装备制造技术(2020年4期)2020-12-25
中华建设(2019年3期)2019-07-24
水电站机电技术(2016年1期)2016-02-28
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18
海军航空大学学报(2015年4期)2015-02-27
