一种基于功能安全的座椅系统防夹方案*
2024-02-01 17:23伍伊军张小波
汽车电器 2024年1期
伍伊军,张小波,张 强,刘 钦
(江铃汽车股份有限公司,江西 南昌 330001)
座椅系统是汽车的重要组成部分,但在使用过程中,乘客在调整座椅时可能会发生夹伤事故,给乘客带来伤害和不便。因此,如何设计一种基于功能安全的座椅系统防夹方案,已成为汽车制造商和设计师们亟需解决的问题。近年来,随着ISO 26262标准的出台,座椅系统的安全性得到了更高的重视。基于功能安全的座椅系统防夹方案应该考虑如何在座椅调节时避免夹伤,如何在发生夹伤时及时停止调节,以及在设计座椅时充分考虑乘客的安全和舒适度等因素。本文将探讨基于功能安全的座椅系统防夹方案的设计思路和实现方法。
1 座椅系统基本设计
汽车座椅调节系统是汽车座椅的一个重要部分,用于调整座椅的高度、角度和前后位置等,以适应不同身高和体型的乘客,提高乘坐舒适度和安全性。下文将对汽车座椅调节系统的主要调节方式进行介绍。如图1所示。
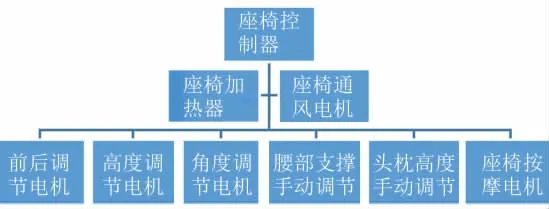
图1 座椅调节系统主要调节方式
1)前后调节:前后调节是汽车座椅最基本的调节方式,用于调整座椅与踏板之间的距离。
2)高度调节:高度调节是调节座椅高度的一种方式,用于适应不同身高的乘客。
3)角度调节:角度调节是调节座椅倾斜角度的一种方式,用于适应不同乘客的坐姿需求。
4)腰部支撑调节:腰部支撑调节是调节座椅腰部支撑的一种方式,用于提高乘客的舒适度和健康性。考虑到乘客的身体特征和座椅调节方式等因素,腰部支撑调节通过机械手动手柄来实现,机械手动手柄位于座椅侧面。
5)头枕高度调节:头枕高度调节是调节座椅头枕高度的一种方式,用于适应不同身高的乘客。考虑到乘客的身体特征和座椅调节方式等因素,头枕高度调节采用机械手动手柄来实现,机械手动手柄位于头枕后面。
6)座椅加热、通风和按摩等功能:一些高端汽车座椅还可能配备加热、通风和按摩等功能,以提高乘客的舒适度和健康性。这些功能通常通过按键或中控台上的控制面板来实现。
前后调节、高度调节和角度调节通常通过手柄或按键来实现,手柄通常位于座椅下方或侧面,按键则位于座椅侧面或中控台上。本项目采用按键方案。
总之,汽车座椅调节系统是现代汽车中不可或缺的一个部分,通过多种调节方式来适应不同的乘客需求,提高乘坐舒适度和安全性。限于篇幅,本文选取座椅角度调节功能做进一步阐述。
2 座椅安全分析
2.1 座椅安全风险分析
通过对座椅系统进行风险评估,确定潜在的安全风险和可能的危害是当务之急。HAZOP(危险与操作性分析)和HARA(危害分析和风险评估)都是针对系统安全的分析方法,但它们的重点和应用场景有所不同。
HAZOP分析通过引导词,如过大、反向、缺失和锁死等引导风险识别的过程,以系统功能为分析对象,旨在尽可能全地覆盖功能故障或失效状态下的危害场景,以提供系统安全性能改进基础条件。
HARA分析将基于系统具体运行条件和HAZOP分析的结果,推导出可能导致的危害事件,并基于标准规范内对暴露度、危害度和可控度的定义,通过参考实测数据、理论模型仿真数据和经验值等,对危害事件进行打分,由此判断系统功能应达到的安全完整度等级,进一步分析对应的安全状态和故障容错时间,从而为后续系统安全设计提供数据。
通过对座椅系统安全性能进行分析(HAZOP分析、HARA分析),可输出SG(安全目标),进而确定系统的SR(安全性要求)。
2.2 座椅安全需求目标分解
按照ISO 26262流程,座椅的功能安全目标(SR)进一步地分解成FSR、TSR和HSR。如图2所示。
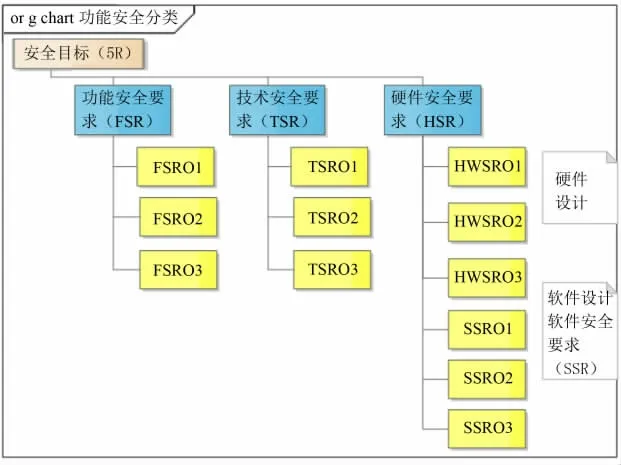
图2 安全目标分解
1)FSR(Functional Safety Requirements,功能安全要求):主要关注系统的功能安全要求,确保系统在功能异常情况下能够维持相应等级的安全性能。FSR的目标是确保系统在设计、开发、测试和验证过程中满足功能安全要求。
2)TSR(Technical Safety Requirements,技术安全要求):主要关注系统的技术安全要求,包括硬件、软件和通信等技术方面的要求。TSR的目标是确保系统的技术安全性能达到要求,以满足FSR的要求。
3)HSR(Hardware Safety Requirements,硬件安全要求):主要关注系统的硬件安全要求,包括硬件设计、硬件测试和硬件验证等方面。HSR的目标是确保系统的硬件安全性能达到要求,以满足FSR和TSR的要求。
2.3 系统功能安全要求FSR
ANSYS medini analyze可以有效地帮助汽车OEM厂商在系统的全产品生命周期中进行功能安全分析和验证,从而确保系统的安全性能达到要求。
结合ANSYS medini analyze软件从4个方面分析功能安全要求(FSR):①输入系统座椅角度调节异常的功能安全要求(检测,判定和确认异常);②处理计算系统座椅角度调节异常的功能安全要求(检测,判定和确认异常);③输出系统座椅角度调节异常功能安全要求(检测,判定和确认异常);④当出现违背安全的异常时的处理方式(处理异常)。
3 座椅系统安全设计
座椅系统角度调节安全设计是汽车安全设计中的一个重要组成部分。座椅系统角度调节的安全设计需要考虑乘客在发生碰撞事故时的安全,以及乘客在长时间乘坐时的舒适度。
角度调节机构指可以调节物体角度的机构,例如座椅的角度调节机构可以调节座椅的前后倾斜角度。角度调节机构的工作原理通常是通过杠杆原理或齿轮传动实现,通过操作手柄或按钮来控制机构的运动,从而达到调节角度的目的。在使用角度调节机构时,需要注意机构的稳定性和可靠性,避免因机构失效而导致的安全隐患。同时,需要根据机构的使用环境和使用目的进行调节,以确保机构的调节角度符合使用要求。
3.1 座椅角度调节功能安全架构(图3)
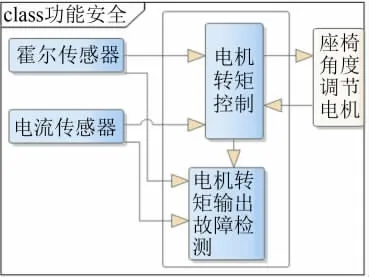
图3 座椅角度调节功能架构
座椅角度调节结合霍尔信号和电流信号进行夹持判断。具体来说,使用霍尔信号的脉冲个数来描述车窗的位置,以此确定座椅是否处于夹持区域内,同时,比较当前电机电流与设定的电流阈值的大小,来判断座椅是否受到过大的力,最终完成夹持识别。
具体为建立座椅角 度调节电机的位置坐标系,以座椅角度调节电机向下运动所能达到的极限位置作为位置的零点,即座椅角度调节电机底部。相应的,上止点为座椅角度调节电机高度,即座椅角度调节电机顶部,以Ha表示。座椅角度调节电机每转一圈,霍尔传感器会输出固定个数的霍尔脉冲,可以以座椅角度调节电机处于下止点时为变量p的零点。当座椅角度调节电机上升时,传感器发出的脉冲高电平个数增大p;当座椅角度调节电机下降时,类似地减小p。因此,p的数值可以衡量座椅角度调节电机相对于下止点的距离,将其定义为座椅角度调节电机的位置。如果座椅角度调节电机由下止点无中断到达上止点,则此时的脉冲个数可以代表座椅角度调节电机的最大行程,将其赋给Ha并记录下来。通过比较实时的p值与Ha,可以判断座椅角度调节电机是否处于防夹区。Ha即为防夹参数中的位置参数。
3.2 座椅控制器状态迁移
座椅角度调节电机状态迁移过程指座椅角度调节电机从一种状态转变为另一种状态的过程。在功能安全方面,座椅角度调节电机状态迁移是一个重要的问题,因为座椅角度调节电机状态的变化可能会导致潜在的危险或故障。因此,需要对座椅角度调节电机状态迁移过程进行设计,如图4所示,以确保电机在状态转移过程中的安全性和可靠性。其状态说明如下。
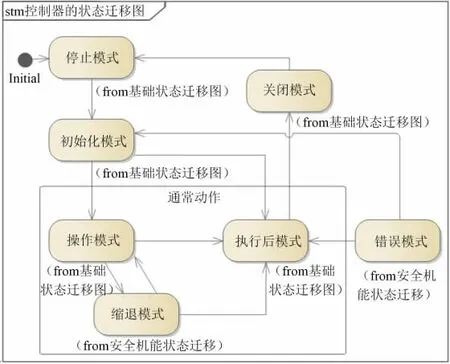
图4 座椅控制器状态迁移
1)停止模式是指电机控制器处于无电源输出状态,所有功能都停止运行,只有当控制器接收到开启信号ON时,才会启动并进入初始化模式。
2)初始化模式是电机控制器在接收到开启信号ON后进入的自检模式,主要包括软件运行环境准备和检测、硬件检测、电压检测等。在这个模式下,电机控制器会检查自身的各项参数和功能是否正常,以确保在操作模式下能够正常工作。
3)操作模式是电机控制器的工作模式之一,此时转矩输出处于激活状态。电机控制器会根据输入的转矩或转速要求,计算电机所需的电流并输出相应的转矩或转速。在操作模式下,电机控制器会持续监测电机的运行状态,并根据需要调整输出的转矩或转速,以满足系统的要求。
4)执行后模式是电机控制器的一种工作模式,此时转矩输出功能处于不激活状态,控制器会保存相关的参数,并反馈执行结果等。在执行后模式下,电机控制器不会输出转矩或转速信号,但会记录相关的参数,以便后续的分析和处理。此模式常用于测试、校准和调试等场合。
5)关闭模式是电机控制器的一种安全模式,此时转矩输出和通信等都不激活。在经过一定的延时后,控制器会进入停止模式。关闭模式常用于紧急情况下的安全停机,或者在电机控制器长时间不使用时的自动关机。这种模式可以保证电机控制器在不需要工作时能够停止运行,避免不必要的电源消耗和潜在的安全隐患。
6)错误模式是电机控制器的一种工作模式,此时转矩输出不被激活。当处理完成后或收到控制器OFF信号时,电机控制器会进入执行后模式。错误模式常出现在电机控制器故障或异常情况时,为了保护电机和系统安全而采取的措施。在错误模式下,电机控制器会停止输出转矩或转速信号,以避免进一步的损坏。
7)缩退模式是电机控制器的另一种工作模式,当出现某些不理想的环境条件时,比如回采的电压偏低或偏高,电机控制器会进入缩退模式。在缩退模式下,转矩输出仍处于激活状态,但输出会受到限制。当不理想的环境条件移除或消失时,电机控制器会迁移到操作模式。缩退模式常用于保护电机和系统安全,以避免在不良环境下夹伤后排人体。
4 结论
基于功能安全的座椅调节设计是汽车座椅设计中的一个重要方面。经过多年的研究和实践,得出了以下结论。
1)座椅调节功能应符合ISO 26262标准中的安全要求,以确保在发生故障时能够保证乘客的安全。
2)座椅调节功能具备故障检测和故障处理等功能,以确保在发生故障时能够及时采取措施。
总之,基于功能安全的座椅调节设计是汽车座椅设计中不可或缺的一个组成部分,通过符合ISO 26262标准中的安全要求,以及与其它系统相互协调,具备稳定性和耐久性等多种措施,可以提高乘客的安全性和舒适度,保障乘客的生命安全。
猜你喜欢
作文小学高年级(2022年3期)2022-04-20
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
今日农业(2019年16期)2019-01-03
福建中学数学(2018年1期)2018-11-29
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
数学小灵通(1-2年级)(2016年3期)2016-11-15
公民与法治(2016年2期)2016-05-17
故事作文·低年级(2016年7期)2016-05-14
工业设计(2016年5期)2016-05-04