
机电一体化系统在机器人智能控制中的应用
2024-01-27 04:00王金文
中国新技术新产品 2023年24期
王金文
(益阳职业技术学院,湖南 益阳 413000)
在深入研究中发现,智能控制涉及专家控制系统、遗传与演化计算系统、人工网络控制系统、智能组合系统以及层次转移控制系统等。目前,随着我国经济高速发展,智能控制系统已经被应用到各方面,与常规的控制手段相比,智能控制可以简化生产流程,提高工人生产效率,降低工程作业对机械的依赖性[1]。在今后的社会发展过程中,智能化将是一个重要的组成部分,并可以对机电一体化技术的发展起到积极的推动作用。为了对该内容进行深入研究,带动机器人产业的发展,该文将引进机电一体化系统并对其在机器人智能控制中的应用进行研究,从而激发机器人在工业领域的效能。
1 基于机电一体化系统的机器人动力学建模
为了满足机器人智能控制需求,在设计方法前,引进机电一体化系统,根据机器人的运动过程和行为进行机器人动力学建模[2]。在该过程中,用机电一体化系统中的交流伺服程序对机器人运动过程反馈的电力信号进行变换,通过该方式实现机器人机械运动和持续运行的功能。为了进一步提高机器人动力学行为转换的准确度,应结合机电一体化系统中的智能控制技术对机器人的集成数字模型系统进行转换[2]。但是考虑到在该过程中交流伺服程序在运行中会受到多种因素的影响,且部分工业机器人的运行状态非常复杂,例如会出现负载扰动、参数变化和强耦合等,很难保证控制后机器人处于稳定运行状态。因此,可以在控制前用机电一体化系统中的伺服程序反馈数据,建立机器人动力学方程,如公式(1)所示。
式中:H(q)为机器人动力学方程;q为机电一体化系统中的伺服程序反馈数据;C为机器人的广义加速度;G为机器人在行进过程中的重力项;τ为机器人动作杆上的驱动作用力。
在上述内容的基础上,根据动力学的空间运动方式设计机器人运动中的角速度,根据机器人基础模型中的关节数量、最大动作范围以及重复定位精准度等参数集成动力学方程。通过该方式实现基于机电一体化系统的机器人动力学建模。
2 机器人局部平衡控制
在上述内容的基础上,对机器人的运动过程进行局部平衡控制,在该过程中,应明确机器人局部平衡控制需要底层进化的支持,而机器人的底层进化对应机器人硬件执行器的控制软件程序,只有确保硬件设备与软件程序、功能存在对照关系,才能保证机器人运动行为的合理性[3]。在运动中,控制终端程序相当于机器人的“大脑”,“大脑”对机器人关节之间的相互配合起非常重要的作用。“大脑”向机器人发出控制命令,以控制“脚”的步态,“眼睛(集成在机器人上的传感器)”通过判断“脚”的步态并将其偏差信息反馈至“大脑”,再根据反馈信息对“脚”的步态进行调整,从而使“眼睛”“脚”在“大脑”的协调下形成一套智能化的步态反馈体系,以保证机器人步态的平衡。该过程如公式(2)所示[4]。
式中:w为机器人局部平衡控制方程;ε为集成在机器人上的传感器反馈的实时数据;B为机器人“大脑”控制模型;λ为广义算子。
通过广义算子驱动机器人上的多个执行关节机构,从而完成机器人的多种行走任务,确保对机器人的局部进行平衡控制。
3 机器人运动补偿与模糊智能控制
完成上述设计后,为了确保机器人运动智能控制的高精度,引进解耦控制器,设计机器人运动行为的补偿与模糊智能控制。机器人运动补偿与模糊智能控制是一种应用于机器人运动控制领域的技术。该技术通过综合利用运动补偿和模糊智能控制方法来提高机器人在复杂环境下的运动性能和精度。机器人运动补偿技术对机器人系统进行建模和分析,预测系统中可能发生的误差和存在的不确定性。然后,在运动控制中加入补偿算法,根据实时测量数据对误差进行修正和补偿,从而实现更精确、更稳定的运动控制。模糊智能控制技术也被应用于机器人运动控制中。模糊控制是一种基于模糊逻辑推理的控制方法,可以处理不确定性和模糊性的问题。通过构建模糊规则库,将不确定的输入量映射到输出量,模糊控制算法可以根据当前的运动状态和环境条件生成相应的控制信号,从而实现对机器人运动进行智能调节和响应的功能。
在该过程中,计算机器人运动行为的偏差如公式(3)所示。
式中:F为机器人运动行为的偏差;M为控制输入函数;l为机器人运动轨迹长度;α为机器人运动中的关节比例系数。
根据计算结果对其运动过程中的位移进行补偿。完成补偿后,对机器人的运动行为进行模糊智能控制,控制过程中将根据现场工作人员以及有关专家的经验和知识,以模糊规则的形式存储在模糊数据库中[5]。将反馈信号与所需的信号进行比较,从而得出准确的输入控制信号。在对该信号进行模糊化后,就可以进行模糊推理[6],在模糊推理结束后,可以得出1个机器人运动行为的输出量,将该输出量去模糊化就可以得到准确的输出控制信号。该过程如公式(4)所示。
式中:f为机器人模糊智能控制;n为输出控制信号;e为模糊规则;δ为模糊数据库。
机器人运动补偿与模糊智能控制技术的结合可以使机器人在面对复杂环境和不确定性时具有更高的运动精度和鲁棒性,可以根据不同的任务和环境条件自动调整自身的运动规划和控制策略。运动补偿技术可以消除或减少由系统因素引起的误差和不稳定性,模糊智能控制技术则可以处理机器人在运动过程中的模糊性和复杂性,使机器人可以自适应地进行运动规划和控制,满足各种工作环境和任务的需求,提高自身的工作效率和性能。根据上述方式实现机器人运动补偿与模糊智能控制功能,完成基于机电一体化系统的机器人智能控制方法设计。
4 对比试验
在深入市场的调研中发现,现阶段,智能机器人广泛应用于很多领域,其独特的构造、灵活的关节使其具有很多其他机器人没有的优势,但是也使其难以实现准确控制。为了推动我国工业机器人的生产制造快速发展,全面提高机器人的智能控制水平,该文引进机电一体化系统进行机器人的智能控制作业。尽管机器人设计与开发的工作已进入了白热化阶段,但是要在真正意义上对该类机器人进行推广,还需要在现有研究成果的基础上,根据产业发展的具体需求进行机器人智能控制方法应用效果的测试。
为了满足测试需求,以某地区大型机器人生产制造科研单位作为试点,在机器人控制终端辅助MATLAB软件,以搭建Stewart测试平台并集成传感器,对机器人在运动过程中的关节活动、轨迹生成以及综合运动等情况进行仿真、反馈,通过该方式实时感知机器人在运动中的工况。测试平台框架如图1所示。
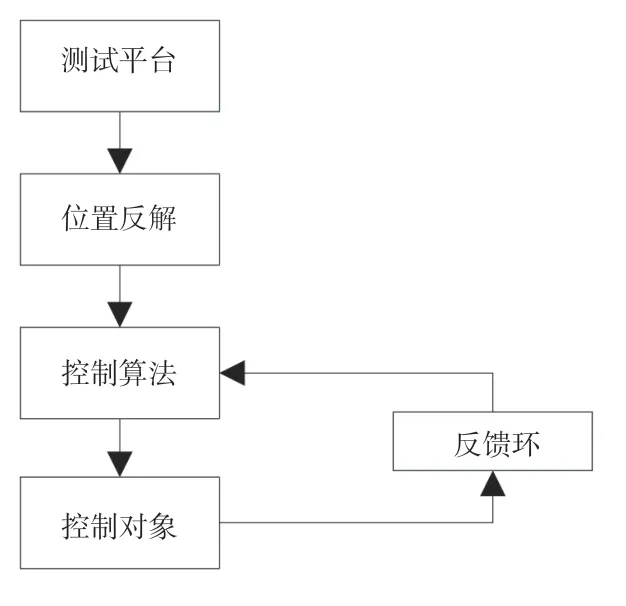
图1 测试平台框架结构
为了确保构建的测试平台可以在试验中具有预期的效果,实现对机器人运动中相关数据的即时反馈和感知,在完成上述内容的设计后,还需要设计Stewart测试平台参数,见表1。
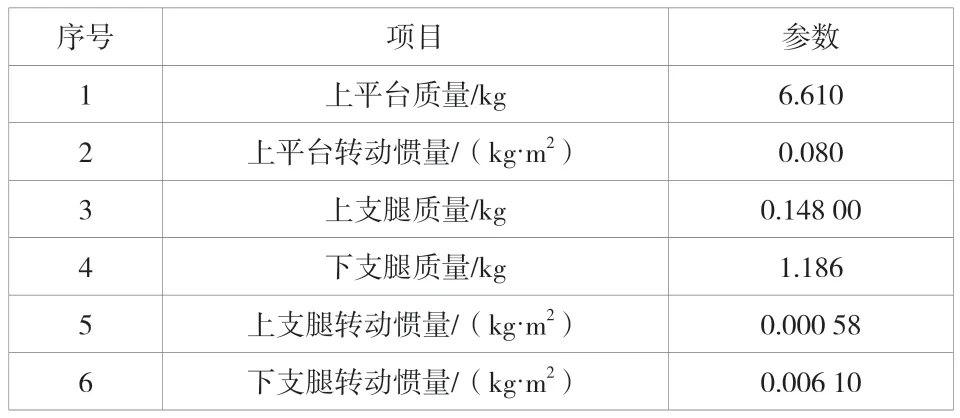
表1 Stewart测试平台参数设计
在上述内容的基础上,选择由科研单位提供的川崎机器人作为研究对象,对该机器人在运动过程中的具体参数进行分析,相关内容见表2。
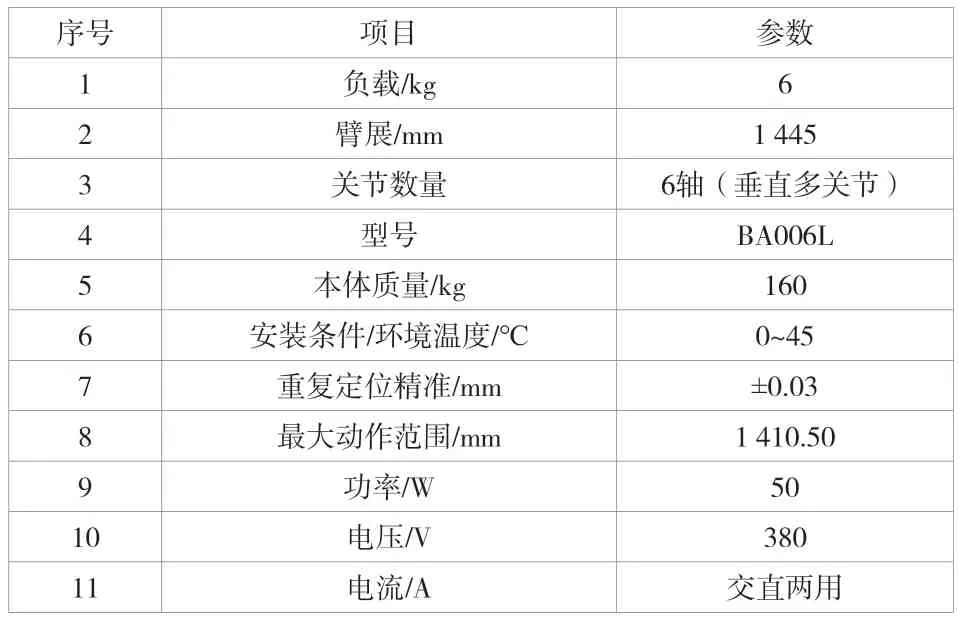
表2 川崎机器人运动中的具体参数分析
在上述内容的基础上,建立机器人的运动方程。在该方程的基础上,采用该文设计的方法进行机器人智能控制。在控制过程中,引进机电一体化系统对机器人进行动力学建模。同时,设计机器人在运动过程中的局部平衡控制,对机器人进行运动补偿与模糊智能控制,从而完成该文设计方法在测试环境中的应用。
为了保证试验结果具有对比性,完成测试环境的构建和该文方法的应用后,引进基于PSO优化模糊算法的机器人智能控制方法和基于STM32微控制器的机器人智能控制方法[7],将其作为试验中的传统方法一、传统方法二,采用该文设计的方法和传统方法根据操作规范进行机器人智能控制。
完成上述设计后,为了对测试结果进行检验,根据试验需求,在Stewart测试平台上设计机器人行进轨迹,使用3种方法对机器人的运动行为进行控制。在Stewart测试平台中记录用3种方法进行智能控制后的机器人行进轨迹,将记录的机器人行进轨迹与设计的机器人行进轨迹进行对比,如图2所示。
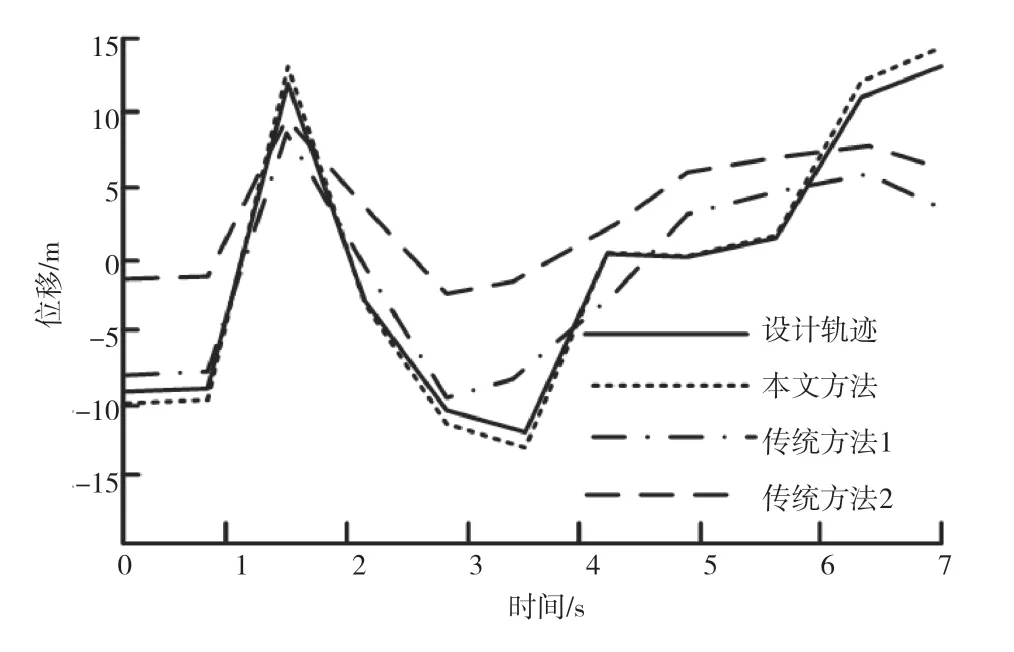
图2 智能控制后机器人的行进轨迹与设计的机器人行进轨迹对比
由图2可知,采用该文设计的方法进行机器人行进轨迹智能控制,控制后的机器人行进轨迹与设计的机器人行进轨迹几乎完全重合。而采用传统方法一、传统方法二进行机器人行进轨迹智能控制,控制后的机器人行进轨迹与设计的机器人行进轨迹存在一定偏差[8],即无法达到预期的控制精度。由此可以证明,采用该文设计的方法进行机器人智能控制的效果最佳。
完成3种方法的测试后,对3种方法控制后的机器人运动参数与设计参数进行对比,将控制后机器人的运动结果与设计运动条件的偏差作为检验该方法应用效果的关键指标,试验结果见表3。
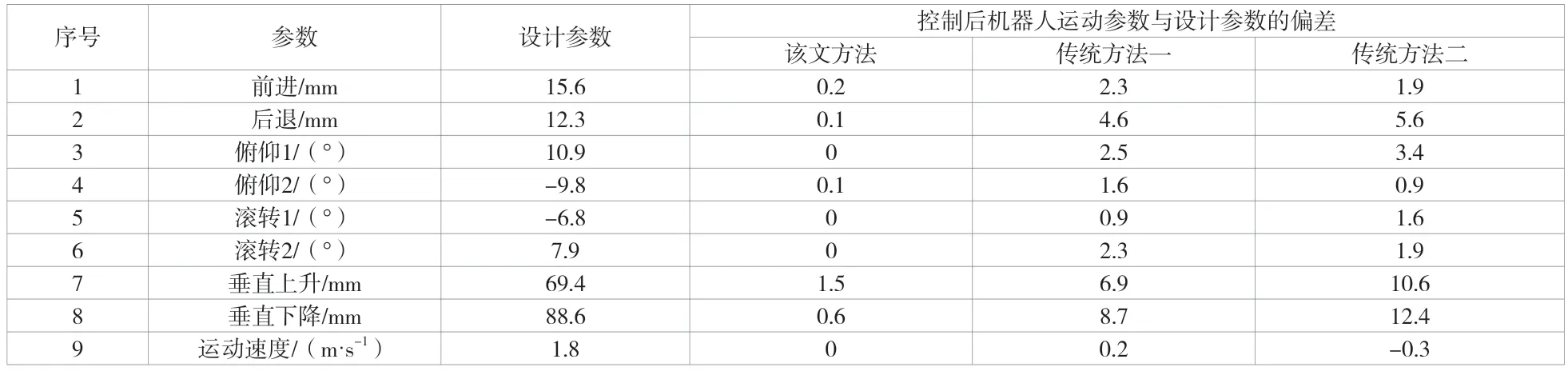
表3 智能控制后机器人运动参数与设计参数的偏差
由表3可知,采用该文设计的方法对机器人运动进行智能控制,控制后机器人运动参数与设计参数的偏差较小,不会对机器人的整体运行过程造成影响。而使用传统方法一与传统方法二进行机器人运动的智能控制,控制后机器人运动参数与设计参数的偏差较大,根据技术部门的评估,会对机器人的整体行进路线或轨迹造成影响。因此,在完成上述研究后,综合试验结果可以得到以下结论:与传统方法相比,该文设计的基于机电一体化系统的控制方法应用效果良好,按照规范采用该文设计的方法进行智能机器人在运动中的智能控制,不仅可以使机器人按照设计轨迹进行运动,而且还可以控制机器人运动参数与设计参数的偏差,通过该方式可以提高机器人的控制精度,发挥工业机器人在市场经济中的价值和效能。
5 结语
为了全面提高机器人的运行效率、运动稳定性以及整体运行水平,该文引进机电一体化系统,通过机器人动力学建模、机器人局部平衡控制以及机器人运动补偿与模糊智能控制进行机器人智能控制方法的设计与研究。通过对比试验可知,该文设计的方法不仅可以使机器人按照设计轨迹进行运动,而且还可以控制机器人运动参数与设计参数的偏差。
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
山东冶金(2019年5期)2019-11-16
建材发展导向(2019年10期)2019-08-24
中国交通信息化(2019年6期)2019-08-23
电子制作(2018年10期)2018-08-04
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
人生十六七(2016年14期)2016-12-01
现代农业(2015年1期)2015-02-28
