
自动巡航消毒机器人的设计与实现
2024-01-24 10:58张印叶春兰周经欣刘茂龙王鸿翔石宝金储德锋
电脑知识与技术 2023年34期
张印 叶春兰 周经欣 刘茂龙 王鸿翔 石宝金 储德锋

摘要:自动巡航消毒机器人能够适应室内外复杂环境,消毒全过程无人值守,节省医护资源。文章基于视觉树莓派智能车,在Linux操作系统下训练TensorFlow模型,进行深度AI学习,并开发完成端手机App,实现远程监控、自动消毒和自动巡航三大功能。
关键词:自动巡航;消毒;深度AI学习;远程监控
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2023)34-0112-04
开放科学(资源服务)标识码(OSID)
0 引言
随着时代的发展,大家对公共卫生安全越来越重视。对于学校、医院、商场等场景固定的场所,较之于传统的消毒方式来说,机器人作业则具有更高的工作效率。特殊时期下,机器人自动消毒不仅减轻了医护人员的压力而且还降低了医护人员感染的风险;另一方面,节省下来宝贵的医护资源,更有利于社会的统筹安排、集中力量办大事救急事。
当前,机器人自动消毒常用的杀菌手段主要有:雾化消毒过氧化氢、紫外线杀菌、激光超干杀菌、离子凈化消毒等。机器人自动消毒可以用环境形式,准确地认准需要消毒的地方,自动进行杀菌消毒。
1 系统整体设计
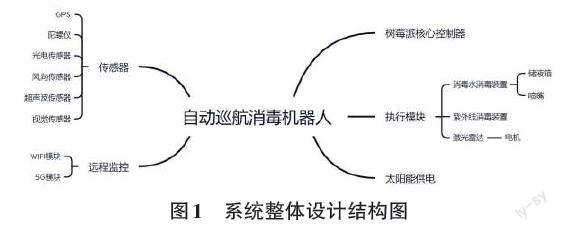
自动巡航消毒机器人系统整体设计如图1所示,系统由传感器、远程监控、树莓派核心控制器、执行模块以及太阳能供电五个部分组成。通过太阳能为整个消毒机器人供电,各个传感器实时实地检测环境信息、机器人的自身状态,检测好后将信息传送到核心控制器,核心控制器将信息处理后,将执行命令传送给实施单元,实施单元负责机器人的消毒工作[1]。远程遥控模块可以实现机器人和手机App之间的互传,机器人可远程传送信息到App,同时可以控制机器人的运作。自动巡航消毒机器人系统基于Linux OS和TensorFlow深度学习框架,基于 OS远程开发监控App,在这个基础上完成机器的视觉、手机监控和自动巡航这3种功能。
2 传感器设计
2.1 卷积神经网络目标检测
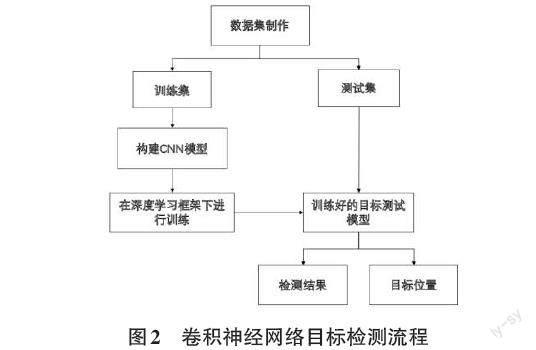
基于广度的学习方法——卷积神经网络(Convolutional Neural Network,CNN) 的基础,通过广度学习获得非线性基础较高的语法,分类准确度的提高,具体检测流程如图2所示。
2.1.1 卷积神经网络构建
按照实际要求,需要机器人对视野目标进行判断,并在图像中标记大小与位置的信息。Faster R-CNN(Faster Regions with Convolutional Neural Network)检测法在速度和精确度都有较明显优势[1]。先提取目标区域,再使用应用卷积神经网络对候选区域进行分类,再通过非极大值抑制这个方法得出图像中的目标的类别与边界。
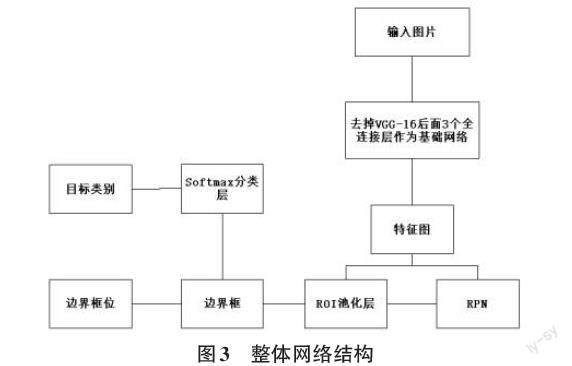
本文使用VGG16作为基础网络对图片特征信息进行提取,将VGG16之后的3个连接层全部删除,通过增加一个分组无线网在输出特征图后完成目标区域和候选区域的生成工作。
将特征图、目标区域、候选区域传送至池化层,网络使用的是Faster R-CNN内容。池化层ROI接收到VGG16提取的特征图、目标区域、候选区域后,将特征图中对应目标区域和候选区域特征转变为向量和长度固定。网络被分两层即是Softmax分类层和边界框回归层,完成识别对象和修正边界框的工作,细化精度去预测对象位置,具体网络结构如图3所示。
Faster R-CNN先确定目标区域和候选区域,再对各个区域进行识别,通过回归算法来修正目标边界。RPN层为目标区域和候选区域,损失函数为目标概率损失叠加边界框位置损失,其表达式为:
[L({P},{t})=1NclsiLcls(Pi,P*i)+λ1Nreg×iP*iLreg(ti,ti∗)]
在上述方程中i是为RPN中的序列号;Pi为锚框对象概率,当锚框有对象的时候,pi*为1,如果锚框没有对象的时候pi*就为0;其中ti和ti*两个分别是预测中的位置的预测参数和边界回归层的偏移坐标;Lcls和Lreg分别是各分类层面上的交叉熵的损失函数及各回归层之上损失函数。
[Lreg=R(ti-t*i)][L({P},{t})]
上式中R(x)为绝对损失函数smoothL1,其表达式为:
[R(x)=][0.5x2,|x|≤1|x|≤1,|x|>1]
若锚框中有相对应的对象,则回归的损失是用pi*Lreg表明,平衡分类损失Ncls和预测损失Nreg,则对这两个损失项进行标准化。
[tx=(x-xa)wa,ty=(y-ya)hatw=lg(wwa),th=lg(h*ha)]
[t*x=(x*-xa)wa,t*y=(y*-ya)hatw=lg(wwa),t*h=lg(h*ha)]
表达式中:x、y和w、h分别作为区域框的坐标及其尺寸;变量xa和x*作为锚框以及窗口回归层区域框。由区域框与锚框的相对位置得出最终区域位置。
2.1.2 迁移学习
深度卷积神经网络有很多参数,为了避免出现适应现状,可以通过增加训练数据集的范围来进行网络训练。来实现深度卷积神经网络识别效果的要求,可用迁移学习训练方法,先在另外大规模数据集上训练,得到训练后的模型参数,用初始化本网络的参数值并再次训练,得到原参数的调优值,反复迭代后得到更加优化的网络模型。训练期间,可实时观测整个训练过程中损失函数的收敛情况。
2.2 滚动窗口和人工势场路径规划
利用机器人所装配的电子监控镜头取得部分信息,得到升级后的目标,在滑动窗口内规划部分路径并实现当前方法,通过不间断地移动窗口,取得新的环境信息资源,从而实现了升级和融合反馈。并且使用算法简化了二维路径使之为一维路径,使用滑动窗口全覆盖地面搜索。当前视野若无待消毒区域,机器人则由风向传感数据继续待消毒区域作业。追踪流程如图4所示。
另外,若检测到区域内无障碍或者障碍物在安全距离外,机器人直接直线行进至目标点;若检测到路面有障碍,则躲避障碍。本文使用人工势场算法VFF(Virtual Field Force),在寻找目标的时候,机器人规避障碍,得到最易到达的路线:将机器人的实际环境变成人为创造场地,使得对象会对机器人形成一种引力作用;同样的障碍物对机器人的作用相似于斥力场中的斥力,机器人运动轨迹由引力与斥力的合力控制。
[Uat(X)=12η(X-Xgoal)2]
[Uat(X)=12k(1p-1p0)2,p≤p00,p>p0]
引、斥力场的表达式,如下所示:
根据负梯度理论,产生的引、斥力分别为:
[Fat=-grad[Uat(X)]=η(X-Xgoal)]
[Fre=-grad[Ure(X)]=k(1p-1p0)]
表达式中:η、X分别为增加引力和运动体坐标;Xgoal为对象坐标(矢量、大小为X-Xgoal、方向为运动实物指向兑现的方位);k、p、p0分别为斥力增益系数、移动物体和障碍间的距離、障碍物的影响范围(正常数)。移动物体运动所受合力及其大小为引、斥力的矢量求和:
[Fsum=Fre+Fat]
2.3 导航定位设计
ATGM3325D-5N方位导航模块可支持北斗系统和GPS导航系统。运作时,定位模块输出数据由串行端口传输到主要控制芯片,并完成经纬度信息的剖析,作为机器人自动巡航、路径规划以及自动返航的基础;实时定位方向使用陀螺加速度计和地磁传感器;中部集合成解算器,可以精准地输出环境下的模块姿态。
2.4 避障模块设计
探测功能使用HC-SR04传感器实现,通过舵机和超声波实现避障[2]。舵机转动使得超声波传感器能够实现多方位的检测。规避障碍采用了输出口并使用TRIG进行测量距离,同时要求至少10μs信号提供,电子线路模块输送40kHz的方形波号,并且需要自动进行检验来返回信号,输入输出端口ECHO 输出一个高电平信号,所探机器人和物体的间距离为高电平持续的时长与速度的乘积,超过最低接触距离后,小车自动后退,舵机转动进行其他方位探测。
2.5 自动巡航设计
自主导航的构建方向主要使用了惯性雷达探测技术,通过两个不同的摄影角度,确定机器人的相对位置,设计工作环境的图形并且记录路线。行进过程中,通过三维激光雷达完成精度小于1厘米的环境定位探索,相对于单独使用视觉特征所构建的地图,其误差小,优化度高,避障更精确[3]。
3 远程监控
手机与智能消毒机器人之间使用TCP/IP协议进行Socket通信,机器人可将视频信息传送到手机,App可通过指令完成对机器人的操作控制。一方面,通过手机App操控机器人时,机器人为S端,App端为C端;另一方面,在通过手机App查看机器人所摄视频时,App端为S端,机器人则为C端[1]。
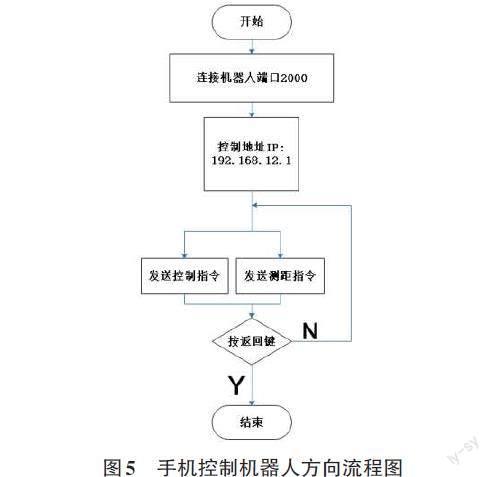
在idea软件平台上,使用机器人的思维流程来完成客户端的代码编写。如图5所示,测试接通机器端口2000号和相应的IP地址,通过得到Socket所展示的IO流向机器人S端获得信息(如机器人的返回数据)或者发送数据,并且用Handler来输出数据。输入网址,进行HTTP连接并验证后,可以查看视频。
4 RPi核心控制器
Raspberry Pi(RPi) 基于Linux OS,多应用于软件编程、教育工业,体积小巧且功能强大。本文主控中构造消毒学习、控制、构建地图、连接无线网、上传数据、缺水报警、报告统计等功能均基于RPi 4b。RPi 4b拥有4个核心CPU和多媒体控制功能强大。为了实现与外设数据的连接与传输,为RPi 4b引入了 USB 2.0 和 3.0 端口以及Type-C 充电端口[4]。
5 消毒执行系统
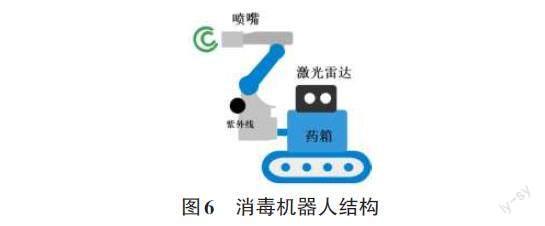
通过内置的配备药剂喷头与紫外线灯的可升降收缩杆,完成消毒机器人的高度调节,完成对目标物体表面的紫外线照射和消毒剂喷洒作业。组件内层使用驱动器,接通控制器的输出口,设备驱动程序电机的转动,使得其能接收处理器的PWM信号,完成对直流电机速度的调节。消毒剂可选取75%的酒精、H2O2溶液等[3]。如图6所示。
6 太阳能供电系统
太阳能电池板能够将太阳能源转化为电能,用于负载或将电能存储于铅酸电池中。铅酸电池运行稳定、循环度高,温度不敏感等优点。太阳能控制能够管理铅酸电池的充放电,优化使用效率、智能负载等[5]。
7 结束语
本文完成了RPi智能车之上采用ATGM3325D-5N定位导航模块、HC-SR04 超声波测距模块并搭载舵机,在Linux OS下训练TensorFlow模型并进行深度AI学习,具备消毒执行系统、太阳能控制系统及手机远程控制系统的自动巡航消毒机器人的设计与实现。经测试消毒机器人能够利用机器视觉技术自动识别目标物体并进行紫外线杀菌及喷洒消毒溶液,能够独立完成规划巡航线路,适应不同环境。
参考文献:
[1] 汤伟,高涵,刘思洋.基于树莓派的小型水域智能垃圾清理机器人系统设计与实现[J].科学技术与工程,2019,19(34):239-247.
[2] 张铮,张江宁,薛竹村,等.循迹避障灭火功能智能小车设计[J].实验室研究与探索,2016,35(11):141-145,205.
[3] 沈家礼,蒋其友,杨环,等.基于树莓派的固定路线巡航消毒机器人设计[J].无线互联科技,2021,18(23):57-58.
[4] 冯三槐,陶文华,张华峰,等.树莓派自动避障小车的消防应用[J].物联网技术,2023,13(4):144-146,149.
[5] 曾升伍,向超,刘波.太阳能供电系统设计与分析[J].中国新通信,2020,22(3):157.
【通联编辑:谢媛媛】
猜你喜欢
中老年保健(2022年4期)2022-11-25
纺织科学研究(2021年1期)2021-12-03
中老年保健(2021年3期)2021-08-22
今日农业(2021年6期)2021-06-09
学生天地(2020年32期)2020-06-09
