基于自主算法的智能工厂低速无人物流车系统研究
2024-01-16 12:40李姗姗陈小波石冬剑
科学技术创新 2024年1期
李姗姗,陈小波,石冬剑
(1.江苏航运职业技术学院 智能制造与信息学院,江苏 南通;2.江苏力德尔电子信息技术有限公司,江苏 南通)
前言
物联网算法的普及和应用首先来自于物流行业,它用更低的成本、更高的效率,更少的误差,对人工作业方式形成了代差优势,是行业未来发展变革的主要方向。因此,做好基于自主算法的无人控制物流系统的前瞻性研究,对把握行业的发展先机至关重要。
1 低速无人物流车运转的必要条件
1.1 车辆控制算法的应用
目前得到应用的主要控制算法都是结合了汽车制造业中,单个工艺设备实体、工序机组或流水生产线的理论生产能力进行效率评估,并以此为依据形成的算法架构,被称之为JPH 设定逻辑(算法)。这种算法贴合实际生产,具有更加精益的物料配送时间窗口、高度柔性化的产品排产需求,能够满足终始端的自动化对接方案等方面的综合要求[1]。通过这种算法作为延伸,定制开发的适用于无人物流车调度系统E100,拥有自动调度数字座舱的控制能力,同时自动匹配站点地图,以停车位为原点,自动运算所有处于正常工作状态的车辆位置,并计算其运输时间,整个系统根据堆栈原则,对待分配的运输任务,按照“排队式”的发车承载逻辑处理运力不足等情况下的优先级排序。然后根据“占位”申请顺序自动推荐无人物流车通过各关联停车位的优先顺序[1]。特殊情况下,也可以以拨码开关或优先标志位占用的方式人为插入自动或手动优先级顺序。当发生突发车辆故障、出现无法逾越障碍物等情况时,将激活控制算法中的应急程序,触发对故障车辆的运输任务再分配,当运输路径不通时,则关闭数据地图中的关联运营并转达通知其他车辆,实现信息互通,确保整个系统互不干扰的稳定运行[1]。
1.2 车辆调度指挥系统
与其他交通专业的调度指挥系统类似,低速无人物流车辆的调度指挥系统也起着调配运输资源、保障运输安全及系统正常运转的作用。依托于核心控制算法,车辆调度指挥系统根据现有的运力计算出相匹配的线路,在人机交互界面形成图形化点阵(或矩阵),车辆调度指挥系统用来管理控制车辆的原则主要包含以下几点:第一,自动调度算法的触发存在一个人工干涉的前置条件,即该算法只针对常规人工调度指令生效(移动指令只能由强制人工调度指令和自动调度算法发出)[1];第二,每一个点阵单元对应一台车辆初始位,且一台车辆初始位只能被一台车辆占用,在自动调度算法激活情况下,点阵占用检测周期为5秒,通过配置参数
可修改周期时长;第三,系统定期清空运行temp 信息,但运行日志将被保存(通常保存一年);第四,系统允许人工指令干涉算法指令,且优先级最高,当识别系统到人工指令时将中断算法,并根据识别标志位发起车辆移动指令,强制人工调度指令车辆可跨越所有站点直达终点[1]。
刑事印证证明准确达成的逻辑反思 逻辑 创新的逻辑 《调度集中系统(CTC)/列车调度指挥系统(TDCS)维护手册》正式出版 一种基于负载均衡的Kubernetes调度改进算法 虚拟机实时迁移调度算法 无人战士无人车 反击无人机 女人买买买的神逻辑 诗到无人爱处工
2 无人车辆控制系统的组成部分
2.1 控制系统软件代码的逻辑架构
在无人车辆控制系统中,控车程序代码相当于普通车辆中的“驾驶员”,上文中提到,雷达、声呐、传感器和摄像头为控车系统提供了外部信息,而处理信息、根据信息做出合理动作与判断这依托于处理器,或者说依托于控制代码的逻辑结构。首先是车控系统的监控与遥调,它依托于嵌入式单片机运行控制代码,以E 系列智能无人车系统为例,该系列无人车操控系统所采用的CPU 为德州仪器产MSP 家族单片机,通过结合其他辅助逻辑芯片等外围电路设计,让各个机能模块彼此分散独立。使用者可以根据不同的用途更换不同的模块,在出现故障时,可以快速更换模块排除故障。这样设计既增强了整个系统的组织灵活性,也降低了其维护难度。一般的模块组合有模拟控制、数字控制、开关控制、C 总线控制、I2C/SPI/UART数字采集、50Am 模拟小电流采集等。不仅如此,通过自研的扩展协议可以支持多路并联扩展,使得该系统可以实时采集各传感器状态和实时控制车辆控制器,以达到预定的控制率目标,并且可以弹性地适配不同的车辆配置[2]。在性能允许的情况下,控制代码会关闭不必要的传感器以降低功耗,其总体逻辑结构如图1所示。
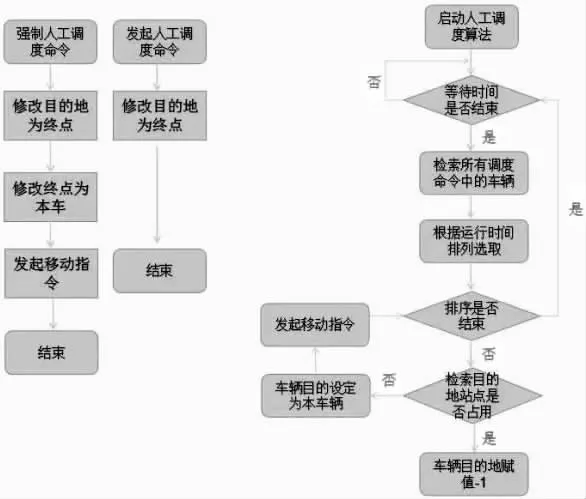
图1 E200 无人物流车辆控制系统逻辑架构
上述逻辑的基本运行原则取自蜂群无人机的工作机制,包括车辆与障碍物间距离控制、自动导航、路况信息及地图信息共享等等。整个代码程序的逻辑原理是利用迪杰斯特拉算法通过蜂群计算提高规划收敛速度,增强系统摆脱局部最优解的能力,同时允许任务在无人车群内部的二次实时调度[2]。
2.2 环境识别和数据库匹配
为了实现对物体高分辨率成像,车辆对环境的识别还需要合成孔径雷达的帮助,再利用运动物体的多普勒效应,获取复杂微波辐射背景下的清晰雷达图像,为车辆识别物体做出控制判别提供可靠依据。另一方面利用上述算法还可以做到对规则运动物体轨迹的识别预判。类似于多障碍物运动趋势预测的计算方法,其运算逻辑封装仍然是输入- 输出模式,将数据自动输入逻辑链条顶端,计算其二维运行轨迹,在此基础上,需要增加自身威胁的评估,其依据的是与地图数据库的匹配、物体的速度和轨迹、物体规模的大小,判定不同运动物体的威胁程度。为自主路径规划提供了底层支撑。该方法对于平台发送的任务具有智能分流、快速响应调度、用户体验良好和能效比高的特点[2]。
图2 是E200 无人车辆利用数据库匹配发现识别障碍物的实例图像。

图2 E200 无人车辆障碍物识别
3 运动定位与立体视距功能的实现
3.1 运输目标与障碍物的识别
在无人驾驶车行驶过程中,运用的是精简版的蜂群车辆避让算法,通过去掉其中的三维变量变成二维模型即可运用与智能工厂场景来识别车载摄像机图像中不同的物体信息,也称之为模糊算法。目标或障碍物的识别方法主要采用罗盘式方向划分,一车辆头部传感器为中心,其正前方为默认为正北向,识别步长为15 度,即一点钟方向、二点钟方向...直到十二点方向。其与障碍物的距离定义为dl、df、dr,车辆运动方向与目标方向的夹角定义为ic,该变量作为模糊控制的输入,通过步长控制速度进行反馈,将无人车运动的角度变化cc 作为模糊控制的输出[3]。假设车辆转轴最大范围为正负180°,量化之后其对应语言变量记为{1 点向,2 点向,3 点向,....}{LB,LS,Z,RS,RB};输入系统之后形成的模糊控制规则如表1 所示。
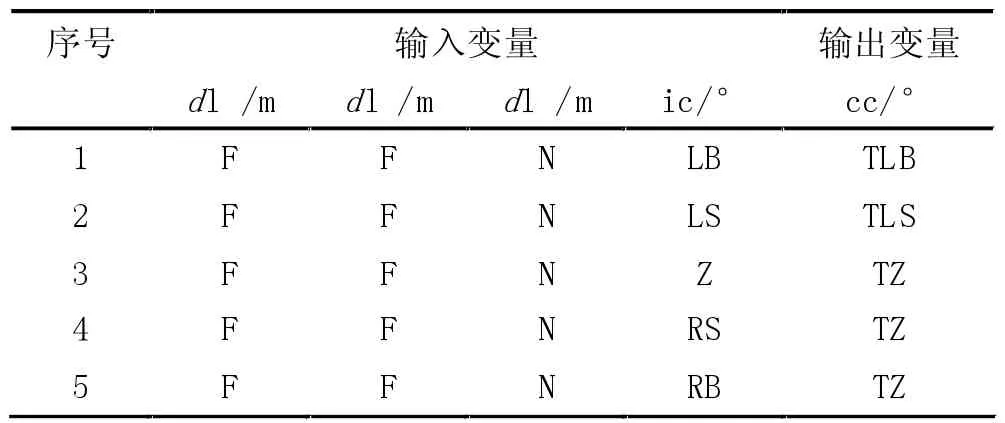
表1 模糊控制规则库(部分)
3.2 定位系统与工作路径规划及目标搜寻
车辆定位系统与目标搜寻功能主要依靠车辆调度指挥系统所分配的运输任务起始目标参数来实现,从算法角度来说,则依靠对场地的环境建模与车辆路径规划决定。假设根据计算发现的最优安全无碰撞路径P1,P2,…,Pn。在路径规划模型中,无人车i 的路径Pi 由一组向量表示Pi=(pi1,pi2,…,pil),则路径总长度为min(Pi1,Pi2,…,Pil)D=∑k=1k=lPikl。该公式中:Pik 表示无人车i 行走第k 步的路径长度。假设Pik 表示任务点(xi,yi)和任务点(x'i,y'i)的距离,那么Pik 可通过(xi,yi)与(x'i,y'i)之间的欧式距离衡量,即Pik =(x'i-xi)2+(y'i-yi)2[4],此处规定无人车只能进行平面运动|Xa-Xa-1|-2≤l,∀a>1|Ya-Ya-1|≤l,∀a>1,l 为常数(Xa-Xa-1)2+(Ya-Ya)-2≤l,∀a>1,式中:a 为无人车行走至第a 步;Xa、Ya 分别为无人车第a 步时的横坐标值和纵坐标值。为保证无人车之间可保持安全距离,设另一无人车坐标为L(a0,b0)[4],则(Xa-a0)2+(Ya-b0)2≥l,∀a>1。在此基础上进行的路径规划,将加重对周期考量的权重,根据实际实验数据分析比对,其具体情况如表2 所示。
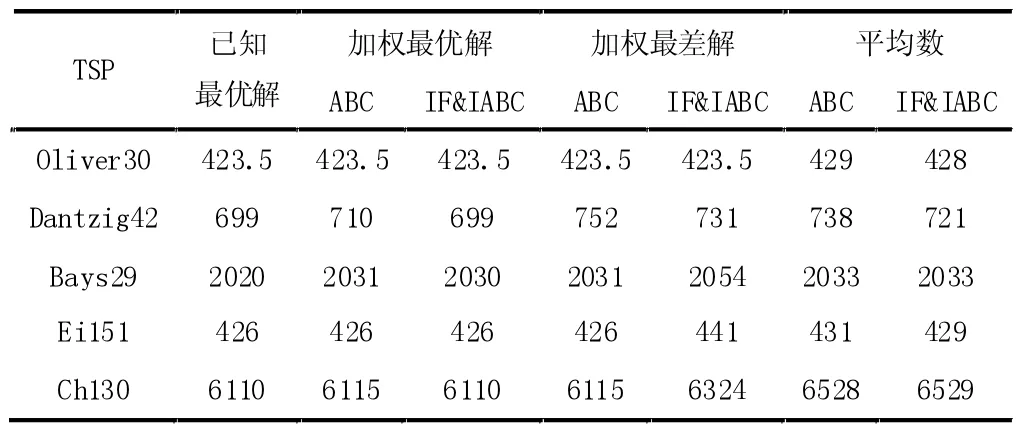
表2 TSP路径规划计算结果
其计算生成的环境与车辆建模关系如图3 所示。
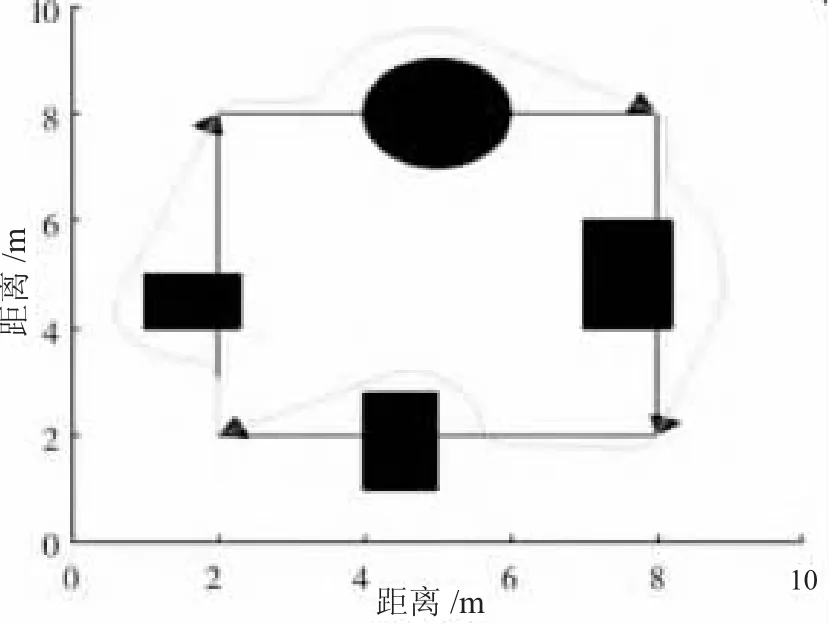
图3 环境简模与车辆轨迹关系
3.3 无人车辆控制系统地图数据库的运用
同很多场景类电子游戏的架构相类似,无人车辆控制系统数据库是整个系统运行不可或缺的组成部分,更是系统软件运行的主框架。数据库中包含了很多可能运用到的算法工具,除去上文中提到的任务分配、路径规划算法及环境识别功能等,还有地图库模型数据;地图模型的构建首先是确定边界,硬件方面一般是由车辆传感器识别紫外光来终止移动,从而形成虚拟围栏,对于地图内部部分无法进入的区域,也采用类似办法对“黑域”进行闭合,假设车辆通信半径为R,根据地图的具体情况,可以用无线紫外光将虚拟围栏划分为:链路建立区1(0) 图4 虚拟围栏算法环境下的避让关系 智能化无人物流车的应用可以有效满足我国运输业的发展需求,缓解相关行业人力资源紧张的矛盾,提高物流行业的工作效率。本文简要介绍了整个系统的组织架构和运用算法,希望可以通过互相之间的交流与探讨,促进彼此共同进步。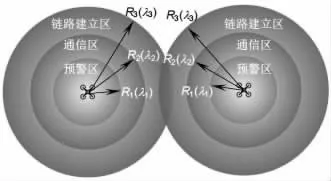
结束语
猜你喜欢
法律方法(2022年2期)2022-10-20
中学生百科·大语文(2021年11期)2021-12-05
纺织科学研究(2021年7期)2021-08-14
铁道通信信号(2020年10期)2020-02-07
成都信息工程大学学报(2019年3期)2019-09-25
三门峡职业技术学院学报(2019年1期)2019-06-27
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
37°女人(2017年11期)2017-11-14
岷峨诗稿(2017年4期)2017-04-20