6- DOFs 机器臂在位置模式下追随运动意图的研究
2024-01-16 12:40刘环宇陈明祥高孟扬
科学技术创新 2024年1期
刘环宇,陈明祥,高孟扬,王 钰*
(青岛大学 机电工程学院,山东 青岛)
脑卒中是一种常见的神经系统疾病,患者在康复过程中面临着各种挑战[1]。传统的康复方法主要依赖医护人员的被动干预。随着康复医学的发展,主动康复[2]作为一种创新的康复模式受到越来越多的关注。主动康复强调患者在康复过程中的主动参与。其中的关键是通过提供合适的康复训练设备和技术[3]。这些设备和技术可以帮助患者改善肌力、平衡能力、协调性和运动控制等方面的功能[4]。研究表明,脑卒中患者的主动康复对于康复效果的提升起到积极的作用。主动康复能够促进大脑的可塑性和神经网络重构,改善受损区域的功能,并提高日常生活活动的独立性[5]。然而,目前康复设备依然存在着一些缺陷。它们主要以被动模式进行训练,机器人主导运动,患者被动接受,导致患者缺乏主动参与和积极性,无法充分发挥康复潜力。
本文提出了一种基于角度-速度映射的控制算法,通过判断合力与TCP 所在轨迹点处切线方向的夹角来实现相应的康复运动。
1 运动空间范围的确定
1.1 人机交互运动系统
建立人机交互系统,康复机器人与患者在主动康复模式下的位置关系如图1 所示。
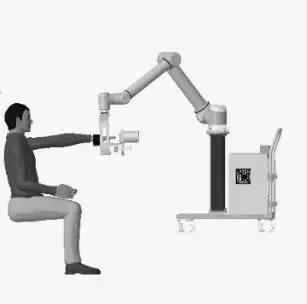
图1 人机交互系统
在运动的过程中,通过绑带的形式与患者进行固定,要求患者的患肢手掌心与协作机器人末端的TCP,在整个交互过程中始终保持重合。
1.2 空间平面轨迹的设定
首先,以TCP 的圆心位置为原点,建立机器人的机架坐标系Cb等效对齐的握手坐标系Ck,即空间平面轨迹Sk将相对于Ck建立,如图2 所示。利用D-H 法建立齐次变换矩阵,即可计算出握手坐标系Ck相对于机架坐标系Cb的坐标变换(见图2)。
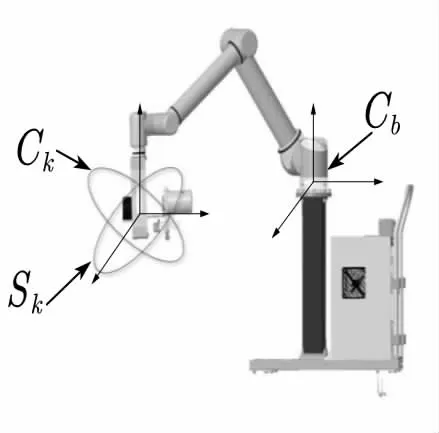
图2 坐标系关系
在串行机器人的理论下, 首先确定第一个关节到第二个关节的变换。依次通过这样的坐标系变换,最后就可以得出机器人的总变换矩阵。而相邻连杆坐标系n 相对于坐标系n-1 的齐次变换矩阵T 的通用表达式为:
变换到等效对齐的握手坐标系Ck的齐次变换矩阵为:
式中:r1和d1则代表Ck相对于Ct的旋转和平移变化;D代表Ck的原点相对于Cb原点的距离向量。
假设机架坐标系Cb中描述一个任意的空间平面方程为:
则该平面在握手坐标系Ck中,并且过原点的空间平面方程为:
则Ck的平面轨迹方程可描述为:
因此,在构建空间中平面轨迹时,先按照平面曲面构建,然后由上述坐标变换到空间中即可。
2 数据的滤波处理
传感器输出的测量信号中往往还包含许多噪声等无关的信号,从而影响测量精度。
二阶低通滤波器的功能在于对信号进行平滑处理,使得输出信号更加稳定,减少高频干扰。
二阶低通滤波频率表达式 Gs为:
式中: ωn为截止频率; ξ为阻尼比。
截取六维力传感器采集的一段合力数据, 通过MATLAB 中的Curve Fitting 工具箱对该数据进行8项sum of sine 拟合,其中各阶所对应的截止频率如表1 所示。

表1 拟合曲线各阶所对应的频率
待选定截止频率后,通过MATLAB 中的阶跃响应函数step 来确定该系统的阻尼比, 代入阻尼比0.6、0.7、0.707、0.8、1, 比对阶跃响应进入稳态范围所花费的最小时间以及最小波动,选择最佳阻尼比0.7。因此在阻尼比为0.7 时,各频率(选取第二、三、四项)对应滤波曲线如图3 所示。
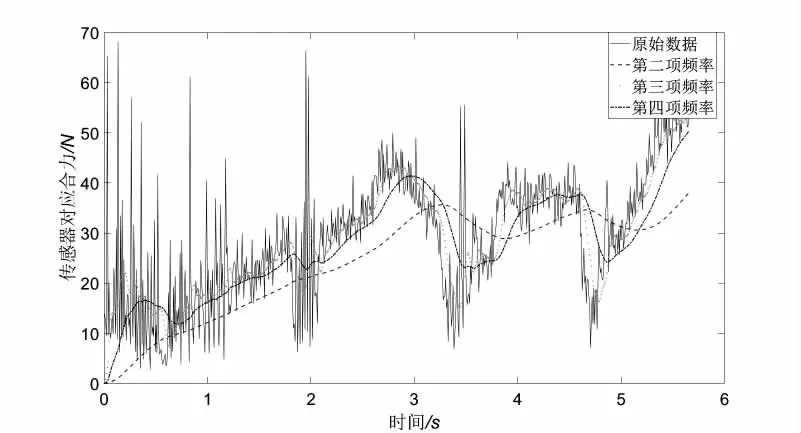
图3 第二、三、四阶频率对应滤波
由图3 可知, 当取第二项对应频率作为截止频率时,滤波数据具有较大的延时性,随着各项频率的增大,延时性减小,但是数据中所夹杂的噪音也逐渐增多,其中第四项所对应频率的滤波效果最佳。但是,低通滤波的截止频率除了衰减高频信号外, 也会在一定程度上衰减角频率临近截止频率的信号, 因此最后截止频率需要比第四项对应的频率稍微大一些, 即取截止频率为 ωn=1.7 rad/s。
3 实验与分析
3.1 主动运动算法的建立
主动算法是在机器人的位置模式下工作,因此,各个关节的电机应设置成位置模式。主动算法的控制流程如图4 所示。
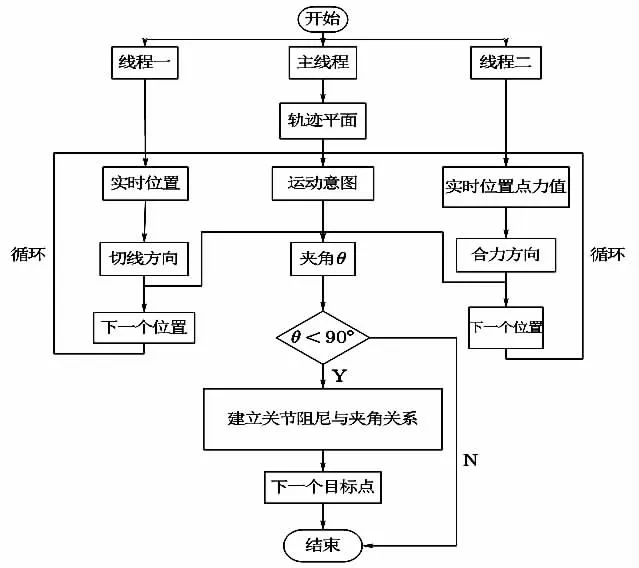
图4 主动控制算法
主动控制算法采用了多线程思想来实现机器人的运动控制。线程一实时获取机器人的位置点信息,计算其切线方向。线程二实时获取机器人受到的力的大小,并且进行合力方向计算。主线程计算合力方向和切线方向的夹角大小来判断机器人的运动速度。夹角较小时,表示机器人的运动方向与合力方向较为一致,此时可以施加较小的关节阻尼,使机器人以较快速度运动。反之,则运动速度减慢。
3.2 样机测试
通过设计了一个半圆形轨迹, 并要求患者在规定的轨迹上进行阶段性运动。实验过程中记录了手的运动数据,并将其导出到MATLAB 平台上,通过plot3 函数进行可视化绘图,如图5 所示。
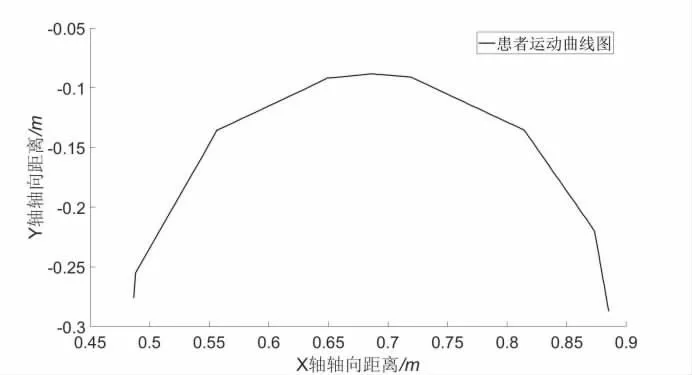
图5 患者实际运动位置
根据图5 所示, 共设定了6个节点,形成了7 段路程。在每个节点处, 机器人能够判断患者的运动意图, 并检查合力方向与圆弧切线方向之间的夹角大小,根据夹角大小设置不同的速度,并且当夹角大于或等于90°时,TCP末端速度为0,如图6 所示。可以看出患者能够按照预设的主动控制算法进行运动, 并且能够良好地掌握合力的方向。这表明实验基本上实现了研究的预期结果。
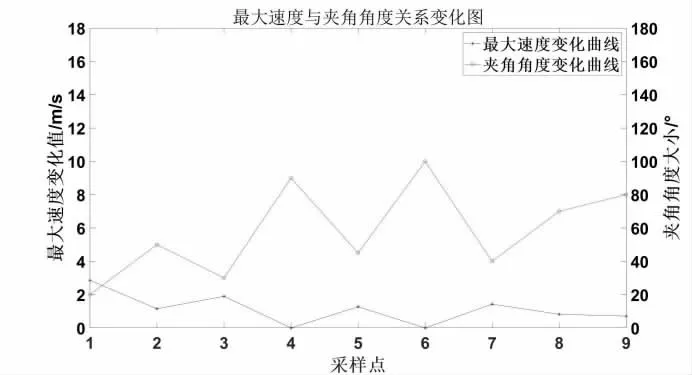
图6 运动过程中最大速度与夹角关系
4 结论
综上所述, 针对脑卒中患者在康复的过程中, 能够更好的控制手臂输出的力的大小和力的方向, 为上肢主动康复提供了一种有效的交互方式。通过机器臂的运动模式设定和运动意图的解析, 患者可以在规定的轨迹上进行有目的的运动, 从而促进康复进程。这种交互模式为上肢康复治疗提供了一种新的可能性,有望提高康复效果和患者的生活质量。
猜你喜欢
激光与红外(2023年8期)2023-09-22
无损检测(2022年6期)2022-07-05
地震研究(2021年1期)2021-04-13
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
重庆理工大学学报(自然科学)(2019年6期)2019-07-16
振动与冲击(2019年4期)2019-02-22
西南石油大学学报(自然科学版)(2018年4期)2018-08-02
上海公路(2018年3期)2018-03-21
广州大学学报(自然科学版)(2016年2期)2017-01-15