电力线杆塔监测中点云数据的应用
2024-01-16 12:40王维坤童贤德丁思明魏茂荣
科学技术创新 2024年1期
徐 郑,王维坤,童贤德,丁思明,魏茂荣
(安徽送变电工程有限公司,安徽 合肥)
引言
输电线路走廊中的电力线杆塔受到干扰因素(如地基下沉、基础补平、恶劣气候、结构老化、外力破坏等)的影响可能出现变形问题,一旦电力线杆塔变形,不仅会影响电力线杆塔的输电稳定性,且会给整个输电线路埋下安全隐患。在此情况下,必须做好电力线杆塔变形监测工作,在新时代背景下,可引入三维激光点云而提高变形监测精度。
1 电力线杆塔所处输电线路走廊分析
为提高电力线杆塔变形监测精度,提高三维激光点云运用效果,在正式运用之前需对电力线杆塔所处的输电线路走廊环境进行分析。输电线路走廊环境复杂,高大乔木等因素可对目标电力线杆塔产生遮盖,不利于杆塔点云数据的采集,且在三维激光点云特征图中,高大乔木为高值响应,同样可表现在三维激光点云特征图内,因此,为高精度获取电力线杆塔的三维激光点云数据,需区分乔木与杆塔,以杆塔、线路之间存在的相对关系为依据进行输电线路提取,随后确定杆塔大致位置,进一步联合分析高差距离点云特征与坡度点云特征,以此方可完成输电线路走廊区域的划定[1]。
在确认分析电力线杆塔所处的输电线路环境时,需对距离特征点云图像及坡度特征点云图像的二值化阈值进行确定。在现行架空线路设计规范中明确指出了各个电压等级的输电线路参数指标,其中对地最小距离如表1 所示,从中提取各电压等级的对地距离最小值,将其作为对地安全距离,将其整理,如表2 所示。在已知电力线路电压等级后,将电力线杆塔电压等级最大距离视为距离特征点云图像二值化阈值(将其记为T距),同时借助式(1)计算得出坡度特征点云的二值化阈值。
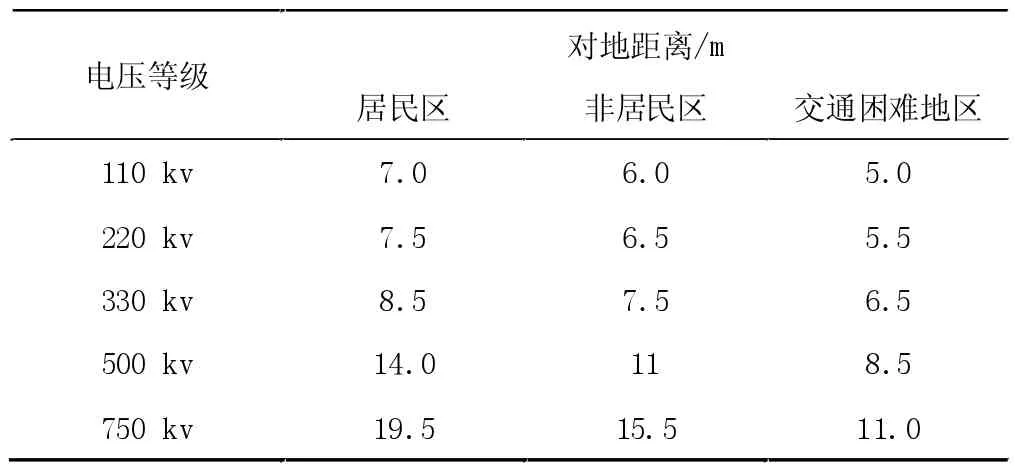
表1 架空线路设计规范中的对地最小距离
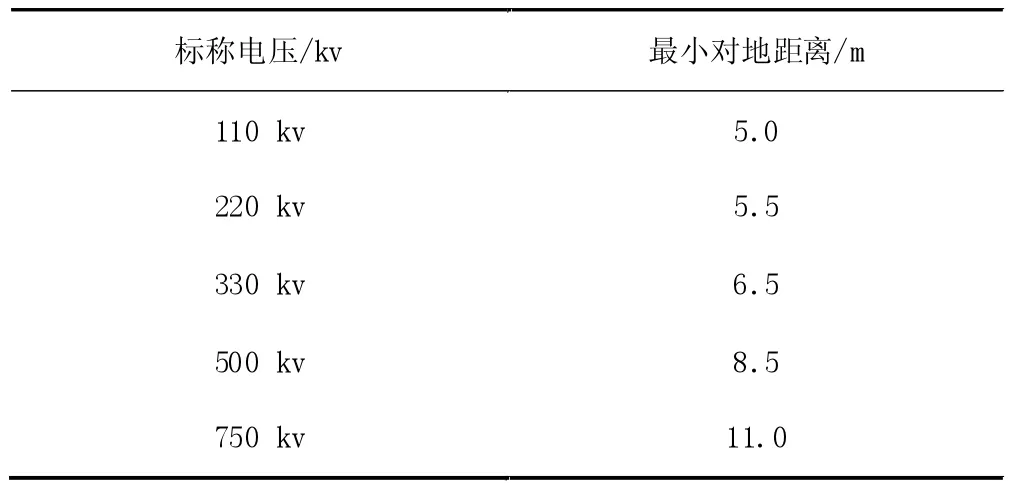
表2 对地安全距离
式中:T坡为坡度特征点云的二值化阈值;arctan 为正反切函数;dmin为对地距离最小值;g 为万有引力常数。
完成T距、T坡参数的确认后则结合三维点云图像进行二值化处理及形态学闭运算,以此进行膨胀运算与腐蚀运算,得出线路空洞区域,随后结合形态学闭操作结果确认电力线杆塔输电线路三维激光点云图像区域。
2 电力线杆塔三维激光点云数据采集及预处理
2.1 数据采集
电力线杆塔所处环境复杂,其变形缓慢,通常需周期性监测。在三维激光点云数据采集时,可借助全站仪、无人机等装置进行三维激光点云采集,此时需根据整个输电线路区域特征而选择适宜的数据采集方式,并合理确定三维激光点云数据采集参数[2]。
承载于全站仪或无人机等装置上的激光扫描仪可采集记录电力线杆塔点位数据,根据距离值、垂直角、水平角而得出三维坐标值,公式如式(2)所示:
式中:X、Y、Z 代表三维坐标;d 为距离值;φ、θ 分别为垂直角、水平角。
2.2 点云预处理
激光扫描仪装置所采集的三维激光点云数据易受到噪声影响而产生噪声点与孤点,可对三维激光点云数据的准确性产生影响,继而降低电力线杆塔变形监测精度,因此,基于三维激光点云而展开电力线杆塔变形监测时,应提前做好三维激光点云数据的预处理,均一化处理点云数据,并滤波降噪。
通常情况下,三维激光点云蕴含着特定统计规律,点云数据图像中心点与邻域点之间的距离符合高斯分布特性,故在电云预处理过程中,依托于高斯分布特性而定位无效点,剔除噪声点与孤点,完成去噪过程。在此基础上,借助体素格网滤波器均一化处理完成降噪的三维激光点云数据。为保障均一化处理效果,需结合激光扫描仪的载体装置采集数据而选择适宜规格的体素格网滤波器[3]。完成降噪与均一化处理后,所得的电力线杆塔状态较为清晰,具体可见图1、图2。

图1 降噪与均一化处理后的点云数据图像(顶视图)

图2 降噪与均一化处理后的点云数据图像(透视图)
2.3 特征图分析
依托于三维激光点云而进行电力线杆塔变形监测时,需明确电力线杆塔特征参数,如高差、坡度等,基于特征而确定电力线杆塔三维坐标,以便精准得出电力线杆塔的变形情况。三维激光点云特征图计算期间,选取数字坡度特征、高差特征作为特征值,借助混合运算的方式进行坡度特征、高差特征的计算,得出电力线杆塔的状态数据[4]。
在坡度特征计算时需得出坡度数据,在电力线杆塔变形监测过程中,坡度数据能够呈现出电力线杆塔的高程变化情况,根据该参数可判断电力线杆塔是否存在倾斜变形问题,并可进一步结合精准的坡度数据而得出电力线杆塔倾斜变形程度。在高差特征计算时,所得出的高差数据能够表现电力线杆塔、高大乔木的高程分布状况,且整体性了解输电线路区域内的变形状况。完成特征图分析后,则根据特征数据情况细化调整三维激光点云数据,所得坡度特征点云图像与高差特征点云图像可见图3。
3 电力线杆塔三维激光点云变形监测计算
3.1 变形杆塔定位
随着现代化城市基础设施体系的完善,电力线杆塔在城乡区域基本实现了全面覆盖,以满足各地用电需求,保障电力供应,这就意味着电力线杆塔所处的输电线路走廊环境愈发复杂,电力线杆塔受到不良干扰因素易出现变形问题,其中最为典型且最为常见的则为倾斜变形[5]。基于三维激光点云进行电力线杆塔变形监测过程中,主要依靠激光扫描仪所采集到的三维激光点云数据图像而分析是否存在变形监测。结合上述分析可知,通过三维激光点云数据图像可提取关键特征,以关键特征为依据展开细致分析,在电力线杆塔变形监测过程中,考虑到最为典型且最为常见的则为倾斜变形,故选取坡度特征及高差特征进行变形监测。而在此期间,坡度特征主要用于判断变形电力线杆塔的坡度情况(即倾斜变形程度),为精准定位输电线路走廊中的变形电力线杆塔,则可根据高差特征而整体了解电力线杆塔之间的高差情况,若发现某一电力线杆塔高差与其他电力线杆塔存在高差差距,则可判定该电力线杆塔可能存在变形问题,此时可通过局部高密度点位的迭代运算而进一步定位变形电力线杆塔,并运用坡度特征计算方式而明确该电力线杆塔的变形程度,在完成电力线杆塔变形监测的同时,明确变形程度以及变形电力线杆塔的定位,为后续变形处理作业的开展奠定基础。
3.2 变形监测计算
结合上述特征图分析可知,基于三维激光点云监测电力线杆塔变形情况时,主要借助三维激光点云坡度特征而得出电力线杆塔的倾斜变形情况,根据高差特征而整体性了解输电线路走廊区域的电力线杆塔倾斜变形状况。为精度完成电力线杆塔变形监测,需以三维激光点云真实数据进行计算。
以坡度特征为依据的电力线杆塔变形监测计算公式如下所示:
以高差特征为依据电力线杆塔变形监测计算公式如下所示:
式中:R 为高差特征;HDSM为显示所有表面物体(如杆塔、高大乔木)的高程模型;HDEM为输电线路走廊区域范围内的高程数据集[6]。由此可见,在电力线杆塔变形监测过程中,可结合三维激光点云数据图像而提取电力线杆塔坡度特征及高差特征,并借助特定计算公式而获得电力线杆塔真实的坡度情况及高差情况。在坡度特征数据支撑下,可帮助相关人员分析判断电力线杆塔是否存在倾斜变形问题,并得出倾斜变形程度,同时可基于高差特征数据而整体性了解输电线路走廊区域内的电力线杆塔高差情况,可根据电力线杆塔之间的高差数据而定位存在倾斜变形问题的电力线杆塔,切实发挥出三维激光电云在电力线杆塔变形监测中的作用,降低变形监测工作量及人为监测误差,以此则可高精度、高质量完成电力线杆塔变形监测工作。
结束语
综上所述,三维激光点云在电力线杆塔变形监测中具有良好应用效果,为保障变形监测质量,切实发挥出三维激光点云的积极作用,需做好输电线线路走廊场景分析,完成点云数据采集后进行预处理,提取特征图并进行计算,随后以三维激光点云数据为依据进行电力线杆塔迭代定位,进一步进行变形监测计算即可。
猜你喜欢
卫星应用(2022年1期)2022-03-09
煤气与热力(2021年10期)2021-12-02
装饰装修天地(2020年11期)2020-07-04
电子制作(2019年11期)2019-07-04
铁道勘察(2018年5期)2018-10-22
电子制作(2017年14期)2017-12-18
电信科学(2016年11期)2016-11-23
电测与仪表(2016年23期)2016-04-12
房地产导刊(2015年6期)2015-10-21
电测与仪表(2014年13期)2014-04-04