
发明解读
——智能电动工具及其控制方法
2024-01-15 11:02:02
电动工具 2023年6期
授权公告号:CN114629382 B
授权公告日:2023.12.01
专利权人:南京泉峰科技有限公司
发明人:吴勇慷、柯洪涛
随着电动工具的发展,电动工具的智能化控制技术得到越来越广泛的应用。例如,冲击扳手冲击螺丝批,利用控制器驱动电机实现紧固件的装配、拆卸等工作。然而,冲击扳手冲击螺丝批在工作过程中,不同工况下冲击速度不同,对冲击块的打击力度不同。在某些工况下,冲击强度大,导致冲击结构提前失效,甚至无法保证机械结构的安全。现有技术中通常是通过工具使用者自行把握冲击螺丝批的冲击力度,这样冲击力度控制不稳,很容易导致冲击力度不够、打击效果不好或冲击力度过大导致冲击结构提前失效,甚至损坏机械结构等问题。
发明专利“智能电动工具及其控制方法”提供一种智能电动工具及其控制方法,以实现冲击扳手冲击螺丝批在工作过程中,能够根据不同工况自动控制电机的转速,在保证速度的同时保证机械结构安全,提高工作效率。
发明内容:
发明提供了一种智能电动工具,包括:冲击元件;电机,用于驱动冲击元件动作;供电模块,用于为电机供电;参数检测单元,用于检测电机的工作参数;控制器,至少与电机和电流检测单元电连接;控制器被配置为:获取电机的工作参数;根据工作参数计算冲击元件的冲击频率,并根据冲击频率改变电机的运行状态,使电机的运行状态处于冲击频率对应的预设状态下。
发明还提供了一种智能电动工具的控制方法,该智能电动工具的控制方法由智能电动工具执行,智能电动工具包括冲击元件、电机,用于驱动冲击元件动作;供电模块,用于为电机供电;参数检测单元,用于检测电机的工作参数;控制器,至少与电机和参数检测单元电连接;控制方法包括:获取电机的工作参数;根据工作参数计算冲击元件的冲击频率,并根据冲击频率改变电机的运行状态,使电机的运行状态处于冲击频率对应的预设状态下。
发明提供一种智能电动工具,该智能电动工具包括:冲击元件;电机,用于驱动冲击元件动作;供电模块,用于为电机供电;参数检测单元,用于检测电机的工作参数;控制器,至少与电机和电流检测单元电连接;控制器被配置为:获取电机的工作参数;根据工作参数计算冲击元件的冲击频率,并根据冲击频率改变电机的运行状态,使电机的运行状态处于冲击频率对应的预设状态下。通过该智能电动工具可以解决现有技术中人工把握冲击力度导致冲击效果差、冲击提前失效、损坏机械结构等问题,使冲击类电动工具在工作过程中,能够根据不同工况自动控制电机的转速,在保证速度的同时保证机械结构安全,提高工作效率。
实施方式:
图1为发明提供的一种智能电动工具的电路结构框图。参考图1,该智能电动工具包括:冲击元件101;电机102,用于驱动冲击元件101动作;供电模块103,用于为电机102供电;参数检测单元100,用于检测电机102的工作参数;控制器106,至少与电机102和参数检测单元100电连接;控制器106被配置为:获取电机102的工作参数;根据工作参数计算冲击元件101的冲击频率,并根据冲击频率改变电机102的运行状态,使电机102的运行状态处于冲击频率对应的预设状态下。
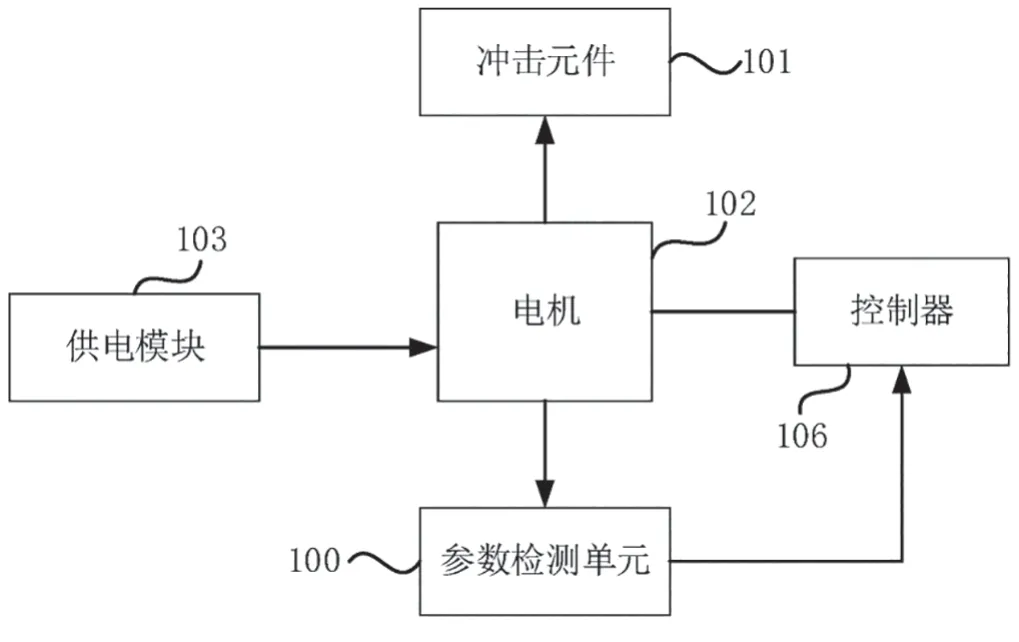
图1
其中,冲击元件101与电机102的输出轴连接,电机102转动驱动冲击元件101工作。冲击元件101用于实现智能电动工具的功能。供电模块103与电机电连接,为电机提供电能,供电模块103可以为可充电锂电池等。参数检测单元100与电机102电连接,其中,参数检测单元100用于实时检测电机102的工作参数,例如电机在工作中的电流值和转速,参数检测单元100与控制器106电连接,用于将实时检测的电机102的工作参数信息发送给控制器106。其中,冲击元件101所处的工况不同,其冲击频率也不相同,则所需求的电机102的转速也就不同。冲击元件101的冲击频率与电机102的预设转速相对应,冲击频率大时需要降低电机102的转速,例如,冲击元件101冲击钢板时若冲击频率过大,则需要降低电机102的转速,防止损坏冲击元件101。
电机102与冲击元件101连接,电机102以一定的转速运动驱动冲击元件101工作。参数检测单元100实时检测电机102的工作参数,并发送至控制器106。控制器106根据接收到的电机102的工作参数计算出冲击元件101的冲击频率,并根据冲击元件101的冲击频率调节电机102的运行状态,使电机的运行状态处于冲击频率对应的预设状态下。
通过提供一种智能电动工具,该智能电动工具包括:冲击元件;电机,用于驱动冲击元件动作;供电模块,用于为电机供电;参数检测单元,用于检测电机的工作参数;控制器,至少与电机和参数检测单元电连接;控制器被配置为:获取电机的工作参数;根据工作参数计算冲击元件的冲击频率,并根据冲击频率改变电机的运行状态,使电机的运行状态处于冲击频率对应的预设状态下。通过该智能电动工具解决了现有技术中人工把握冲击力度导致冲击效果差、冲击提前失效、损坏机械结构等问题,使冲击类电动工具在工作过程中,能够根据不同工况自动控制电机的转速,在保证速度的同时保证机械结构安全,提高工作效率。
发明提供的智能电动工具可以为冲击扳手冲击螺丝批,冲击扳手冲击螺丝批包括冲击元件、电机、控制器、用于紧固螺钉的钻头以及参数检测单元。以冲击扳手冲击螺丝批为例,具体工作原理如下:电机102与冲击元件101连接,电机102以一定的转速运动驱动冲击元件101工作。参数检测单元100实时检测电机102的工作参数(例如,电机的工作电流和转速),并发送至控制器106。控制器106根据接收到的电机102的工作参数计算出冲击元件101的冲击频率,并根据冲击元件101的冲击频率调节电机102的运行状态,使电机的运行状态处于冲击频率对应的预设状态下。由此,通过获取电机102实时的工作参数计算出冲击元件101实时的冲击频率,并根据实时计算的冲击频率调整电机102的运行状态,以满足冲击元件101在不同的冲击频率下所对应需求的电机运行状态,从而实现针对不同的冲击工况进行速度控制,在保证速度的同时保证机械结构安全,避免出现冲击力度不够冲击效果不好,冲击力度过大造成冲击提前失效,甚至损坏机械结构等现象。
图2是是发明中的另一种智能电动工具的电路结构框图,图3是发明提供的电机在预设检测周期内的电流变化曲线图。可选地,工作参数包括电机的工作电流和转速;控制器106被配置为:根据电机102在预设检测周期内的工作电流的波峰次数和预设检测周期确定冲击元件的冲击频率。
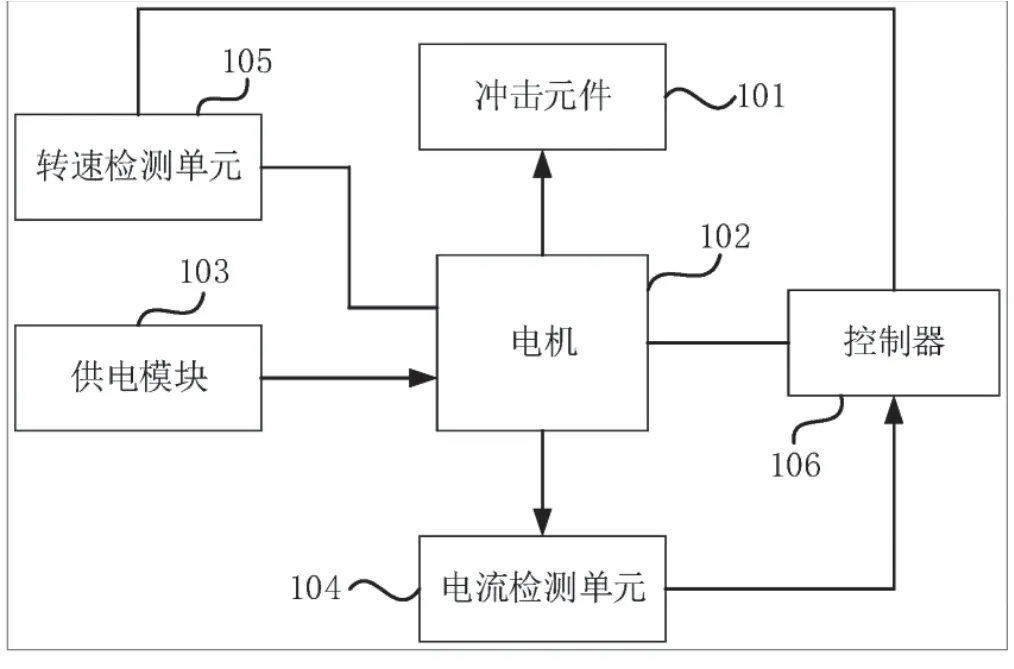
图2
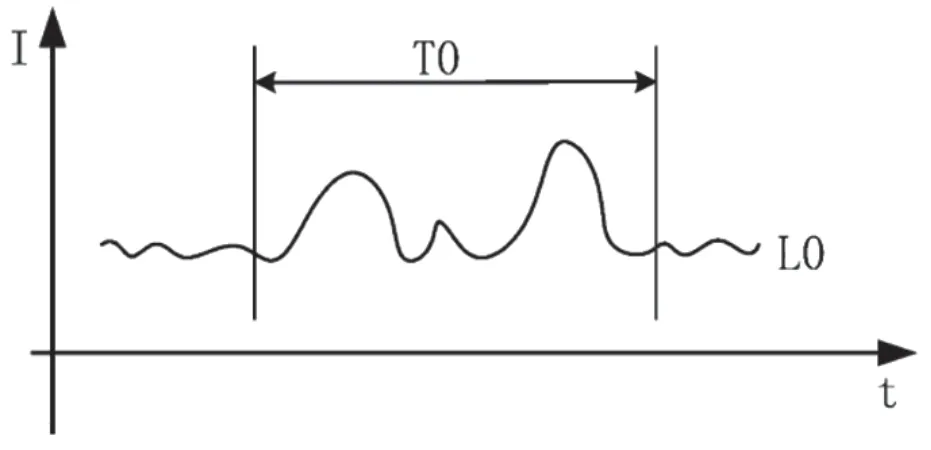
图3
根据冲击频率改变电机102的转速,使电机102的转速处于冲击频率对应的预设转速范围内。工作参数包括电机的工作电流和转速,则参数检测单元100包括电流检测单元104和转速检测单元105。参考图2,电流检测单元104分别与电机102和控制器106电连接,用于检测电机102的转速;转速检测单元105分别与电机102和控制器106电连接,用于检测电机102的转速。
电机的工作参数包括电机的工作电流和转速,控制器可根据冲击频率改变电机102的转速,使电机102的转速处于冲击频率对应的预设转速范围内。控制器106还可根据接收到的电机102的工作电流和/或转速计算出冲击元件101的冲击频率,并根据冲击元件101的冲击频率调节电机102的转速,使电机的转速处于冲击频率对应的预设转速范围内。具体的电机参数的设置可根据实际情况进行设置,不做具体的限定。
根据电机102在预设检测周期内的工作电流的波峰次数与预设检测周期的比值计算冲击元件101的冲击频率。其中,预设检测周期可以为一个检测周期,具体数值可以根据实际的检测需求进行设定,在此不做具体的限定。示例性的,参考图3,L0为电流检测单元检测的电机的工作电流的变化曲线,设预设检测周期为T0,在T0检测周期内电流的波峰次数为n,则冲击元件的冲击频率P0为:
控制器106被配置为:根据冲击频率识别智能电动工具当前的工况,根据工况改变电机102的转速,使电机102的转速处于工况下的预设转速范围内。其中,智能电动工具的工况不同,冲击元件101所需求的冲击力度(或冲击速度)不同,则需要的电机102转速也不相同。智能电动工具为冲击扳手冲击螺丝批为例,冲击扳手冲击螺丝批在不同工况下冲击速度不同,对冲击块的打击力度不同。在某些工况下,若冲击强度太小,冲击力度不够,冲击效果差;若冲击强度过大,容易导致冲击结构提前失效。在一例中,冲击扳手冲击螺丝批的工况可以包括钢板打螺栓和木材打螺钉两种工况,通常,由于木材较软,同样的冲击力度下,木材会发生一定的位移,导致相同冲击时间内的冲击频率较钢板的要小。在根据冲击频率识别出当前的冲击对象为钢板或者类似钢板的材料时,需要降低电机转速,以免对冲击元件造成损坏。因此,控制器106根据实时计算的冲击元件101的冲击频率可以识别出智能电动工具当前所处的工况,并根据识别出的工况将电机102的转速调整至对应工况下的预设转速范围内,即可实现对不同的工况进行速度控制。需要说明的是,本例仅是以冲击扳手冲击螺丝批包括钢板打螺栓和木材打螺钉工况为例进行说明,还可以包括墙体打螺钉等其他工况,不作具体地限定。
控制器106被配置为:在冲击频率处于第一预设范围内时,确定智能电动工具处于第一冲击对象的冲击工况下;在冲击频率处于第二预设范围内时,确定智能电动工具处于第二冲击对象的冲击工况下;第一预设范围大于第二预设范围。第一冲击对象可以是木材或者类似木材的材质较软的材料,第二冲击对象可以是钢板或者类似钢板的硬质材料。第一预设范围可以为大于4400BMP,小于或者等于4700BMP,第二预设范围可以为小于或者等于4400BMP,第一冲击对象可以为钢板打螺栓工况,第二冲击对象可以为木材打螺钉工况。当控制器106计算的冲击频率处于第一预设范围内时,可以识别出智能电动工具处于钢板打螺栓的冲击工况下;当冲击频率处于第二预设范围内时,可以识别出智能电动工具处于木材打螺钉的冲击工况下。
本例仅是以冲击扳手冲击螺丝批为例进行说明,还可以包括电钻、电钻螺丝批等工具,不作具体地限定。控制器被配置为:在第一冲击对象的冲击工况下,降低电机的转速。控制器根据识别出的工况,根据对应工况下需求的电机转速调整电机转速。以冲击扳手冲击螺丝批为例,若识别出智能电动工具当前工况为钢板打螺栓工况,则降低电机的转速,使其处于钢板打螺栓工况对应的预设转速范围内,由此可以防止震动过大而影响电机使用寿命。同理,若识别出智能电动工具在第二冲击对象(例如,木材打螺钉工况)的冲击工况下,则降低电机的转速,使其处于木材打螺钉工况对应的预设转速范围内。
控制器还可以被配置为:当检测到电机以第一预设速度空载运行,若检测到负载时,控制电机以第二预设速度运行,由此可以防止由于电机转速过大,工具的振动影响电机或扳机等结构的寿命。其中,第二预设速度小于第一预设速度,第一预设速度可以为30000r/min,第二预设速度可以为28000r/min。
图4是发明中提供的一种智能电动工具的电路系统框图。参考图4,电机102可以为三相电机,该智能电动工具还包括驱动电路10,驱动电路10与供电模块103、控制器106、电流检测单元104、电机102电连接;供电模块103还与控制器106电连接。其中,驱动电路10包括第一晶体管Q1、第二晶体管Q2、第三晶体管Q3、第四晶体管Q4、第五晶体管Q5和第六晶体管Q6,电机102可以为三相电机;第一晶体管Q1的第一端、第二晶体管Q2的第一端、第三晶体管Q3的第一端与供电模块103的正极电连接,第一晶体管Q1的第二端分别与第四晶体管Q4的第一端和电机102的第一相A连接,第二晶体管Q2的第二端分别与第五晶体管Q5的第一端和电机的第二相B连接,第三晶体管Q3的第二端分别与第六晶体管Q6的第一端和电机的第三相C连接,第四晶体管Q4的第二端、第五晶体管Q5的第二端、第六晶体管Q6的第二端与供电模块103的负极电连接;第一晶体管Q1的控制端、第二晶体管Q2的控制端、第三晶体管Q3的控制端、第四晶体管Q4的控制端、第五晶体管Q5的控制端、第六晶体管Q6的控制端与控制器106电连接。上述六个晶体管可以是半导体功率器件(例如FET,BJT,IGBT等)也可以是任何其他类型的固态开关,例如绝缘栅双极型晶体管(IGBT),双极结型晶体管(BJT)等。
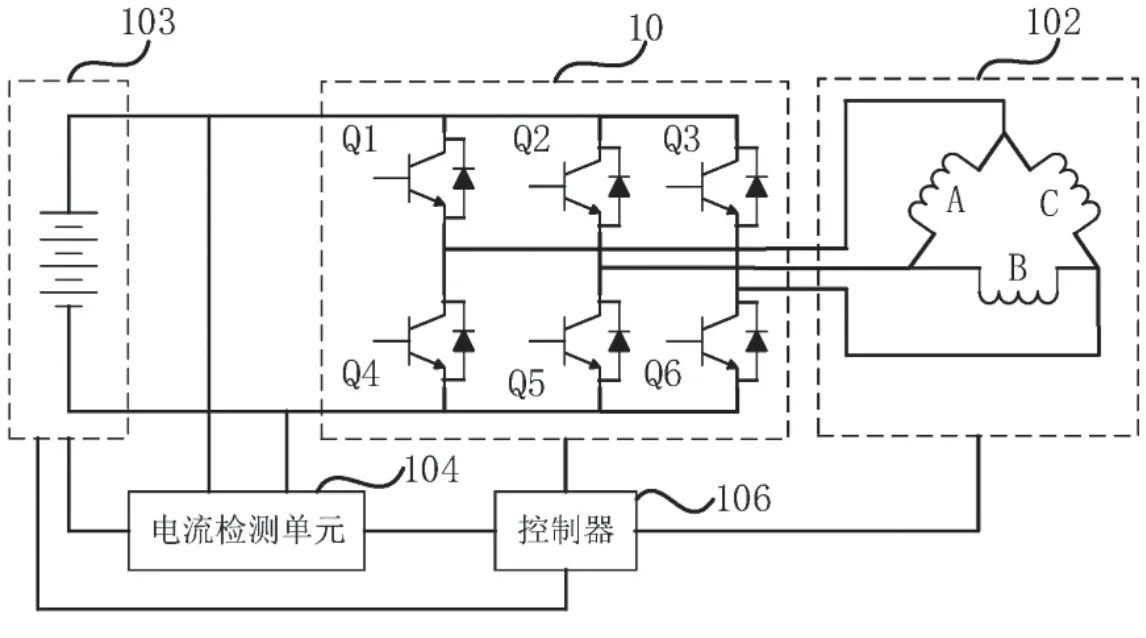
图4
为了使电机转动,驱动电路10具有多个驱动状态,在一个驱动状态下电机的定子绕组会产生一个磁场,控制器106依据电机的转子位置或反电动势输出相应的PWM控制信号至驱动电路10中的开关元件以使驱动电路10切换驱动状态,从而使定子绕组产生变化的磁场以驱动转子转动,进而实现电机的转动或换相或者转速调整。需要说明的是,其它任何能够驱动电机的转动或换相或者转速调整的电路和控制方式均可用于本公开,本公开对驱动电路10的电路结构和控制器106对驱动电路10的控制不做限制。
图5发明提供的一种智能电动工具控制方法的流程图,可适用于智能电动工具的控制方法的实现过程,该方法可以由发明提供的智能电动工具来执行,智能电动工具包括冲击元件,电机,用于驱动冲击元件动作;供电模块,用于为电机供电;数检测单元,用于检测电机的工作参数;控制器,至少与电机和参数检测单元电连接。参考图5,控制方法具体包括如下步骤:步骤110、获取电机的工作参数;其中,工作参数包括电机的工作电流和转速。[0058] 智能电动工具包括电机、控制器、电流检测单元和转速检测单元等,具体地,电机在工作中的电流值可以通过电流检测单元,如电流采样电路获取;电机的转速可以通过转速检测单元,如霍尔传感器获取。电流检测单元分别与电机和控制器电连接,电流检测单元可以为电流采样电路,电流采样电路可以包括检流电阻,通过采集流过检流电阻的电流可以获取电机输出的电流值。通过电流采样电路实时采集电机输出的电流值,并将实时采集的电流值实时反馈给控制器。转速检测单元分别与电机和控制器电连接,转速检测单元可以为霍尔传感器,通过霍尔传感器可以获取电机的实时转速,并将实时采集的电机转速实时反馈给控制器。其中,电流采样电路采集的电流可以包括智能电动工具在开机启动过程、工作过程、停机前等任意时刻的电流。步骤120、根据工作参数计算冲击元件的冲击频率,并根据冲击频率改变电机的运行状态,使电机的运行状态处于冲击频率对应的预设转速范围内。电机与冲击元件连接,电机以一定的转速运动驱动冲击元件工作。参数检测单元实时检测电机的工作参数(例如,电机的工作电流和转速),并发送至控制器。控制器根据接收到的电机的工作参数计算出冲击元件的冲击频率,并根据冲击元件的冲击频率调节电机的运行状态(例如电机的转速),使电机的运行状态处于冲击频率对应的预设状态下。由此,通过获取电机实时的工作参数计算出冲击元件实时的冲击频率,并根据实时计算的冲击频率调整电机的转速,以满足冲击元件在不同的冲击频率下所对应需求的电机转速,从而实现针对不同的冲击工况进行速度控制,在保证速度的同时保证机械结构安全,避免出现冲击力度不够冲击效果不好,冲击力度过大造成冲击提前失效,甚至损坏机械结构等现象。
图5
该智能电动工具控制方法由智能电动工具执行,智能电动工具包括冲击元件,电机,用于驱动冲击元件动作;供电模块,用于为电机供电;数检测单元,用于检测电机的工作参数;控制器,至少与电机和参数检测单元电连接。控制方法包括:获取电机的工作参数;根据工作参数计算冲击元件的冲击频率,并根据冲击频率改变电机的运行状态,使电机的运行状态处于冲击频率对应的预设状态下。通过该智能电动工具控制方法解决了现有技术中人工把握冲击力度导致冲击效果差、冲击提前失效、损坏机械结构等问题,使冲击类电动工具在工作过程中,能够根据不同工况自动控制电机的转速,在保证速度的同时保证机械结构安全,提高工作效率。工作参数包括电机的工作电流和转速;根据工作参数计算冲击元件的冲击频率,包括:根据电机在预设检测周期内的工作电流的波峰次数和预设检测周期确定冲击元件的冲击频率。
该智能电动工具的控制方法还包括:根据冲击频率识别智能电动工具当前的工况,根据工况改变电机的转速,使电机的转速处于工况下的预设转速范围内。根据冲击频率识别智能电动工具当前的工况,包括:在冲击频率处于第一预设范围内时,确定智能电动工具处于第一冲击对象的冲击工况下;在冲击频率处于第二预设范围内时,确定智能电动工具处于第二冲击对象的冲击工况下;其中,第一预设范围大于第二预设范围。该智能电动工具的控制方法还包括:在第一冲击对象的冲击工况下,降低电机的转速。
发明专利“智能电动工具及其控制方法”还可以有其它实施方式,凡采用等同替换或等效变换形成的技术方案,均落在其要求保护的范围之内。
猜你喜欢
玩具世界(2023年6期)2024-01-29 12:15:52
电动工具(2021年6期)2022-01-08 11:28:28
电动工具(2020年6期)2020-12-29 05:53:36
现代工业经济和信息化(2016年2期)2016-05-17 05:34:16
新教育时代电子杂志(学生版)(2015年31期)2015-12-20 08:29:25
电子工业专用设备(2015年4期)2015-05-26 09:10:40
汽车维修与保养(2015年8期)2015-04-17 03:33:01
河南医学高等专科学校学报(2014年3期)2014-03-11 16:32:34
语文教学与研究(2014年11期)2014-02-28 21:55:45
无机化学学报(2014年3期)2014-02-28 17:30:48
