自制浮力本质研究实验装置
2024-01-12 08:46:42黄舒鹏
物理实验 2023年12期
韩 毫,杨 迪,黄舒鹏
(沈阳航空航天大学 a.航空宇航学院;b.理学院,辽宁 沈阳 110136)
浮力是初中物理的重要概念,主要围绕阿基米德原理展开. 当前高中课程均没有对浮力的要求,这也意味着绝大多数学生对浮力的认知仅停留在初中水平[1]. 力学课上教师曾提问:铁块放在盛满水的容器底部,容器和铁块一起自由落体时,铁块所受浮力是否变化?大部分学生回答说不会变,因为根据阿基米德原理,物体受到的浮力等于排开水的重力,铁块排开水的体积没变,故浮力不变. 实际上,当容器、液体和物体一起做自由落体运动时,液体内部没有压力,物体的上表面和下表面没有压力差,从浮力产生的本质来看,此时的物体不受浮力[2]. 阿基米德定律是中学物理教学的重难点, 也是高等师范院校物理专业物理教学论课程的必做实验[3]. 因此,制作实验装置深入了解浮力的本质,并从浮力的本质认识阿基米德原理十分必要.
目前,浮力产生原因的演示实验大多是定性演示,难以从浮力本质的角度解释阿基米德原理. 例如,通过演示装置定性表明浮力的本质是浸入液体中的物体表面受到的液体压力差[4]. 本文受此启发,制作了定量演示浮力本质的实验装置,并从浮力本质角度解释阿基米德原理.
1 实验原理
浮力是效果力,其性质是压力,压力来源于液体内部. 如图1所示,由于液体对立方体4个侧面的压力两两成对,大小相同,方向相反,从而相互抵消. 底面受到的压力竖直向上,顶面受到的压力竖直向下,压力差为

图1 浸没在液体中的立方体
F2-F1=ρgSH2-ρgSH1=ρgSH=ρgV,
(1)
其中,V为立方体体积[5].可以看出,在保持立方体体积不变的前提下,可以通过改变H2-H1来改变立方体表面的压力差.此时,可以设计以物体表面压力差为自变量,物体所受浮力为因变量的实验装置.
2 实验装置
实验器材:玻璃水缸、多块亚克力板、亚克力圆柱管(内径为10.00 cm)、圆柱形泡沫柱(直径为9.80 cm)、Arduino Uno开发板、拉(压)力传感器,2个15.00 cm长的连续液位传感器、2个定滑轮、足够长的不易拉伸的细绳.
实验装置制作过程:
1)将2块中心带有圆孔的亚克力板与圆柱管粘接为“工”字形结构,再将该“工”字形结构与中间隔板一同粘接在玻璃水箱左侧,组成实验装置的箱体结构.
2)将拉力传感器固定在水箱右侧正中位置,连续液位传感器粘贴在适当位置.
3)在玻璃箱体内安装定滑轮,安装时保证左侧定滑轮的左侧沟槽与圆柱管轴线相切,右侧定滑轮的右侧沟槽位于拉力传感器受力点的正下方.
4)用细绳绕过定滑轮将泡沫柱与拉力传感器相连,完成电路的连接.
定量探究浮力本质的演示装置如图2所示,图3为浮力本质演示装置的工作原理图. 左、右2个连续液位传感器与泡沫柱保持固定的距离,分别用于测量左、右液面所处的位置,经过适当的换算,可得出泡沫柱上表面距离左侧液面的距离H1,泡沫柱下表面距离右侧液面的距离H2.拉力传感器则可以实时测得泡沫柱受到的浮力Ffs,H为泡沫柱高度.
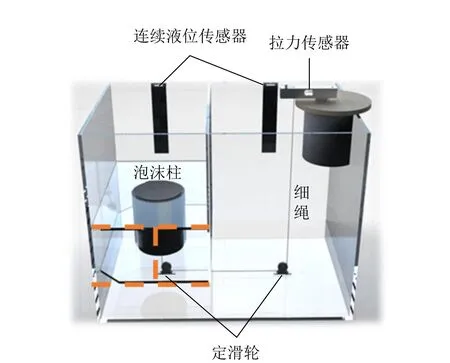
(a)实验装置设计图

(b)实物装置图图2 浮力的本质演示装置
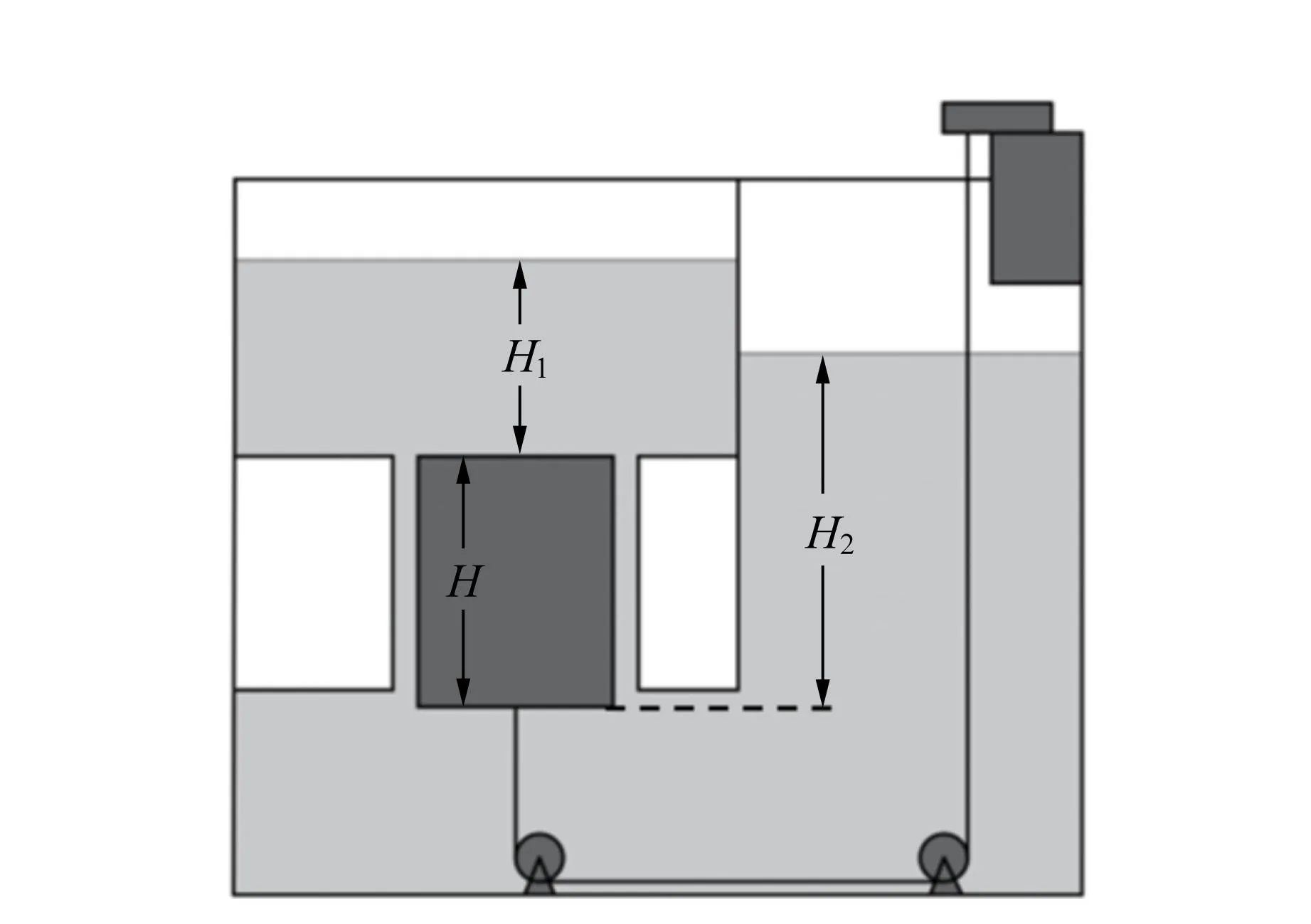
图3 工作原理图
3 实验方法
3.1 实验步骤
1)将实验仪器安放在水平桌面上,向玻璃水缸加入适量的水,直至淹没实验预用水线;调整泡沫柱位置,使其位于圆柱形管正中;连接计算机,打开实验数据采集软件Arduino.
2)用盖板盖住圆柱管上管口,向实验装置左侧水槽中快速注入大量水. 待水面基本平稳后,移走盖板,操作软件Arduino接收实验数据.
3)待左、右水槽中的水面基本相平后,暂停实验数据的接收.
4)抽出装置内多余的水,至实验预用水线. 重复步骤2)~3),重复时向右侧水槽中注水.
5)完成实验,整理实验装置,进行数据处理.
3.2 实验数据处理
利用Matlab处理如表1所示的实验数据. 以ΔH(ΔH=H2-H1)为横坐标,拉力传感器测量值为纵坐标绘制散点图.图4为泡沫柱表面压力差随ΔH的变化曲线.
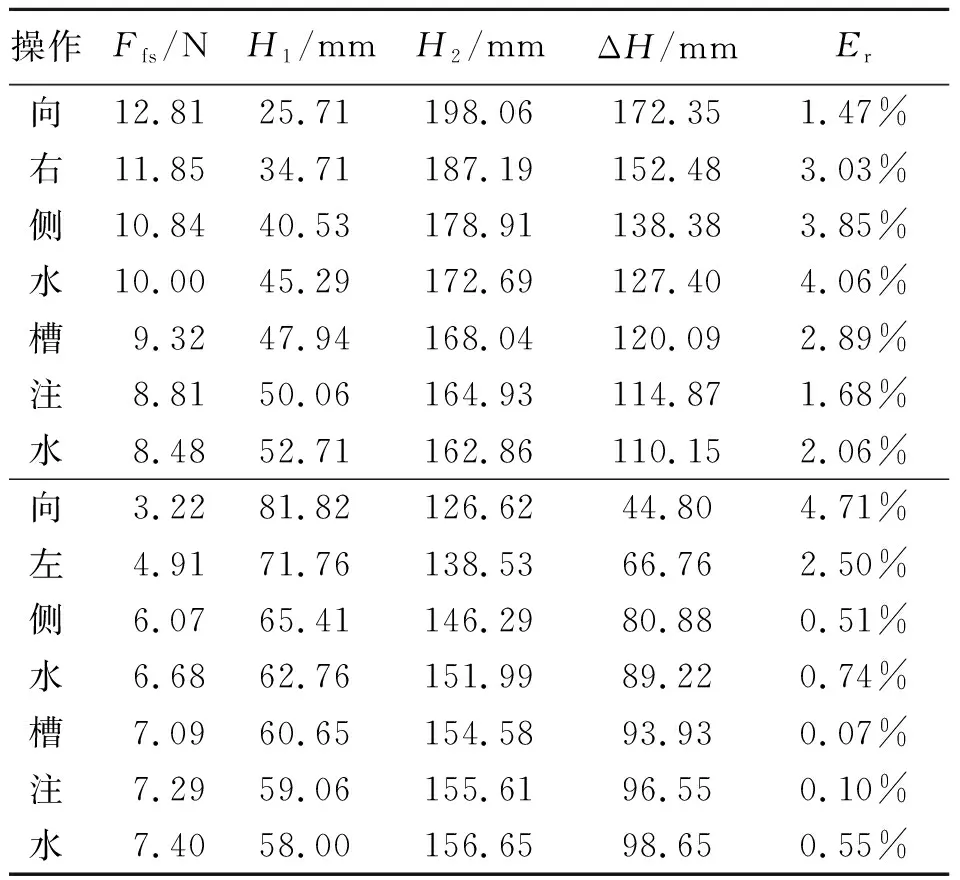
表1 实验数据

图4 实验结果
3.3 实验结果分析
在误差允许范围内,以ΔH为横坐标,拉力传感器测量的浮力大小为纵坐标所绘制的数据点,始终与泡沫柱表面压力差变化曲线重合,说明泡沫柱受到的浮力本质是物体表面受到的液体压力差.
当物体的表面压力差在数值上等于物体排开液体所受的重力时,物体表面的压力差可用F=ρVg计算,即物体所受到的浮力可用阿基米德原理计算.而在实验中,仅当ΔH=H时,有F=ρVg,此时液体处于静止状态.
处于静止液体中的物体(漂浮和与水底接触除外)始终满足ΔH=H,而泡沫柱的底面积S与泡沫柱的高度H的乘积恰好等于泡沫柱体积V,即泡沫柱所排开的液体体积,说明阿基米德原理在静止液体中成立.
4 对不规则物体的进一步探讨
4.1 取出的微元体为三棱柱形
若从不规则物体表面任取长度为l,高度为dh,宽度为w的三棱柱形微元体,其斜面为外表面,如图5所示.假定该微元体所处深度为h,液体压强沿各个方向相同,则其外表面所受的力为

图5 三棱柱形微元体
(2)
若将dF分别沿竖直方向和水平方向分解,有
(3)
dF2=dFsinθ=ρghwdh,
(4)
其中,dF1为竖直方向分力,dF2为水平方向分力,ρgh为微元体所在处的液体压强,wl为微元体上表面的面积,wdh为微元体左侧面的面积,这说明微元体外表面某点受到的液体压力,与将微元体移除后在物体上形成的2个相互垂直的新面所受液体压力的合力等效.对于移除单个微元体所产生的侧面,则会随着相邻微元体的移除而消失.
4.2 取出的微元体为四面体
若从不规则物体表面任取微元四面体,ΔABC为其外表面,如图6所示.同样,假定该微元体所处深度为h,OA,OB和OC的边长分别为a,b和c,由于液体内部压强沿各个方向大小相同,则其外表面所受的力为

图6 四面体形微元体
(5)
若将dF分别沿x轴、y轴和z轴投影,则有
(6)
(7)
(8)

4.3 不规则物体表面压力的等效
任何不规则物体表面,都可以通过“移除”三棱柱形微元体和四面体微元体的方式,将其表面所受的液体压力等效为无数多个平行于水平面或垂直于水平面的微小平面组成的物体表面所受的液体压力,如图7所示.对于垂直于水平面的微小平面,总存在另一微小平面与之相对,两微小平面受到的液体压力的合力为零,使得不规则物体表面受到的液体压力在水平方向上总是平衡的.于是,可以将不规则物体看成由无数个足够小,且与泡沫柱具有相同实验规律的微小长方体所组成,长方体的上、下表面是不规则物体平行于水平方向的等效微小平面.因此,不规则物体所受到的浮力本质上仍然是物体表面受到的液体压力差,在静止液体中可用阿基米德原理计算其所受到的浮力.
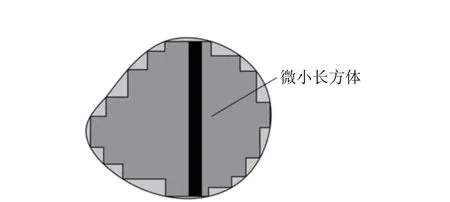
图7 不规则物体表面的等效
5 结束语
物体受到的浮力本质上是物体受到来自于液体的压力.如果物体内部不存在液体压强,则处于液体中的物体不会受到浮力的作用.阿基米德原理本质上也是液体对物体压力的一种表达,在静止液体中,可以使用阿基米德原理计算物体受到的浮力.当液体压强分布规律与静止液体中压强分布规律不相同时,则不能使用阿基米德原理计算浮力,应当从浮力本质角度具体分析.本文自制的实验演示装置定量演示了浮力的本质,说明了浮力与上下表面压力差的关系,并从浮力本质的角度阐述了阿基米德原理.该实验装置制作简单、原理清晰、易于理解,有助于锻炼学生的动手能力,突破思维定势,正确认识浮力.
猜你喜欢
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:44
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:44
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:40
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:36
中学生数理化·八年级物理人教版(2021年5期)2021-11-22 07:57:48
中学生数理化·八年级物理人教版(2021年5期)2021-11-22 07:57:46
云南教育·中学教师(2019年10期)2019-08-13 07:18:10
摄影之友(影像视觉)(2019年3期)2019-03-30 01:36:38
中学生数理化·八年级物理人教版(2017年5期)2017-11-13 03:12:24
数学学习与研究(2016年19期)2016-11-22 10:16:13