无人机大比例尺测图技术应用研究
2024-01-11 09:16韩新哲
科技创新与生产力 2023年12期
韩新哲
(1.华北有色工程勘察院有限公司,河北 石家庄 050021;2.自然资源部金属矿山地下水灾害防治工程技术创新中心,河北 石家庄 050021)
随着无人机(Unmanned Air Vehicle,UAV)系统装备的智能化应用领域不断拓展以及新型测绘地理信息技术研究的深入,基于无人机系统的新型测绘技术应运而生。无人机摄影测量技术以其成本低、安全系数高、复杂区域适应强、精度满足测量要求等优点在各领域得到广泛应用,如智慧城市建设、矿山治理、违建监管等。随着不断深入研究,通过无人机系统平台搭载高清数码相机(单拼相机或五拼相机) 运用摄影测量技术制作4D 测绘产品,包括数字正射影像图(Digital Orthophoto Maps,DOM)、数字高程模型(Digital Elevation Model,DEM)、数字表面模型(Digital Surface Model,DSM)、数字线划图(Digital Line Graph,DLG)以及实景三维模型。张祖勋等[1]阐述了工业摄影测量技术概念,对新型摄影测量技术在算法改进、工艺流程等方面提出了新思路,为我国摄影测量的发展指明了研究方向。陈巧等[2]阐述了无人机摄影测量技术在地质滑坡灾害中的应用,通过快拼影像,获取山体滑坡特征,识别滑坡形变区域,精准的量测滑坡变形值,为地质滑坡灾害精准治理提供依据。兰峰等[3]为构建精细化实景三维模型更好的服务于智慧城市建设,提出一种基于地物类别的倾斜摄影三维建模方法,通过计算三维模型的纹理信息结合植被提取算法,经规整后白膜重构三维模型,能够简化三维模型,且模型外观与原始模型基本无差别,提高了三维模型在地理信息系统中的适配性。赵国梁等[4]验证无人机搭载单拼镜头精心立体绕飞技术在1∶500 不动产测量中的可行性,提高了作业效率,减少了外业飞行时间,节约了人工成本,并经过精度验证表明单镜头绕飞技术在不动产测量中的创新性、适用性。前人的研究探讨了无人机摄影测量技术在各个方面的应用,构建数字正射影像图或实景三维模型服务于各个领域,通过成果图件描绘地理信息,但是如何更加精确地应用到大比例尺测图中,或保证测图精度,就需要更加深入的研究。本文阐述了无人机系统组成及其在大比例尺测图中的关键技术,通过应用实例,分析无人机大比例尺测图技术的可行性、适用性。
1 无人机航摄系统
无人机航摄系统由航摄平台、传感器、差分定位系统、地面控制系统组成[5-8]。
航摄平台指无人机机体,根据飞行方式不同可分为固定翼、旋翼机以及复合翼,相比较而言,旋翼机飞行航时短,载荷任务量轻,较灵活,适应于山区及小面积区域作业。
传感器为搭载的采集数据平台,大比例尺测图应用中一般搭载单拼或五拼高清数码相机,包括可量测相机与非量测相机等。
差分定位系统由GNSS 接收机、地面基站、差分系统组成,通过实时差分技术解算无人机的位置,即位置和姿态测量系统(POS) 数据。
地面控制系统接收和传递无人机信号,对无人机进行发送指令,控制无人机完成作业任务。
2 关键技术研究
本文研究的无人机大比例尺测图技术基于倾斜摄影测量原理,通过无人机搭载五拼镜头,获取下视、前视、后视、左视、右视影像,经过影像匹配与空中三角测量技术,提取特征点,实现实景三维模型重建,并基于实景三维模型进行大比例尺地形图绘制。
2.1 影像匹配
影像匹配根据相邻重叠影像的同名点信息进行提取匹配,通过同名点区域计算影像间的相对位置关系,通常采用尺度不变特征转换(Scale Invariant Feature Tranform) 将各个影像数据匹配到同一坐标系中,主要包括3 个步骤。
1) 特征提取。直接影响匹配速度与产品精度,所以项目实施过程中需均匀布设大量像控点。
2) 特征匹配。建立同名点区域影响间的位置关系,后见影像几何关系模型。
3) 影像变换。将影像数据匹配至同一坐标系下,实现影像的几何变换。
2.2 空中三角测量
空中三角测量主要通过用较少的控制点,计算出位置坐标与影像的外方位元素。采用光速法联合平差的方法,光束法区域网平差是以影像为单位,利用每个影像与所有相邻影像重叠区内(航向、旁向) 的公共点、外业控制点,进行整体求解每张影像的6 个外方位元素。每个摄影中心与影像上观测的像点的连线就像一束光线[9-10],见图1。

图1 光束法区域网平差
2.3 密集匹配与构建三角网
通过多视角匹配技术生成密集点云,由密集点云生成三角网,三角网的复杂性直接反应地形环境的复杂性,根据多视角拍摄获取俯视与侧面纹理,密集的点云直接反应地形的三维信息。采用区域网联合平差来处理倾斜摄影数据,便于全面解决像片之间的几何变形以及遮挡问题。通过POS 数据得到倾斜影像外方位元素,采用由粗到精的金字塔匹配策略在每一级像片上进行同名点的自动匹配以及区域网光束法平差,得到精度较高的同名点匹配结果。同时建立连接点与连接线、POS 数据与GPS/IMU 数据的倾斜图像自检校区域网平差的误差方程,对其采用联合平差计算,来确保平差结果精度能够满足要求。
影像密集匹配是倾斜摄影测量的关键技术,并且倾斜图像的笼罩区域大、分辨率高。所以,在密集匹配过程中可能会产生大量冗余信息的前提下,迅速精确地得到倾斜图像的同名点坐标,从而获取地面物体的三维信息是倾斜影像密集匹配的重点。采用SFM 算法发展起来的多基元、多角度图像匹配方法用于解决倾斜影像密集匹配。
2.4 纹理映射
实景三维模型纹理映射是将真实世界的图像应用于三维模型表面的过程,以使模型看起来更真实且细致。此方法将图像转化为适合于模型表面的数据,并将其映射到模型上。这些图像由无人机航空摄影生成,以保证模型与真实世界场景的一致性。纹理映射将图像与模型的特定区域对应起来,以影像纹理贴图至模型,构建出实景三维模型,达到真实的视觉效果。
2.5 大比例尺地形图绘制
基于完成后的精细化实景三维模型进行矢量数据采集,以实景三维模型图件为底图进行描绘绘制。通过地物数据采集与等高线、高程点提取最终形成大比例尺地形图矢量数据。
3 实例分析与精度评定
本文以某村落1∶500 地形图绘制项目为例,通过中海达iFly D1pro 无人机搭载五拼相机进行工作区倾斜摄影测量,构建实景三维模型,绘制地形图。中海达iFly D1pro 无人机挂载倾斜摄影测量系统,集成1 个垂直相机和4 个倾斜相机,有效像素为1.2 亿像素(2400×5),下视相机镜头焦距为25 mm,倾斜相机镜头焦距为35 mm。工作区海拔均匀,地势平坦,俱备无人机倾斜摄影测量条件。
3.1 像片控制测量
像控点布设根据测区实际情况划分区域网布点,采用IMU/GNSS 辅助航摄,1∶500 地形图测制,航线跨度不大于6 条,基线跨度不大于12 条。本次像控点之间按平均150 m 的格网间距均匀布设,且覆盖整个试验区。喷涂标识时应以像控点为中心,喷绘像控拐点形状,像控点的测量主要采用GNSS-RTK 方法。
3.2 航线规划
根据倾斜摄影的数据处理经验,模型精度一般是地面分辨率的3 倍,因此,为满足测图精度,设计航摄分辨率为1.5 cm,设计航高时,倾斜相机的性能计算公式为
式中:a 为成像单元;GSD 为地面分辨率;f 为镜头焦距;H 为航摄高度。
由式(1)设计相对航高约96 m,为保证模型成果的精细化,航摄重叠率设计为航向重叠率80%,旁向重叠率75%,外扩后飞行面积约0.6 km2,任务航时约50 min,航摄速度为8 m/s。
3.3 三维模型构建
1) 整理航摄后的原始影像、相机文件及POS数据。
2) 对航摄后的影像进行匀光匀色处理,使最终影像成果在视觉上的表现完整统一。
3) 将相机参数、影像数据、POS 数据导入建模软件,进行多视角影像特征点密集匹配,并进行区域网的自由网多视影像约束平差解算,建立在空间上相对位置关系准确的区域网模型,完成相对定向;将外业测定的像片控制点成果,在内业环境中进行转刺,利用这些控制点对已有区域网模型进行约束平差解算,将区域网纳入到精确的地面坐标系统中,完成绝对定向。空中三角测量结束后应及时查看精度报告以符合规定的精度要求。经过空中三角测量得到每张像片的精确外方位元素后,在建模软件里提交建模任务,设置相关参数并进行自动化建模处理,建立后实景三维模型示意图见图2。
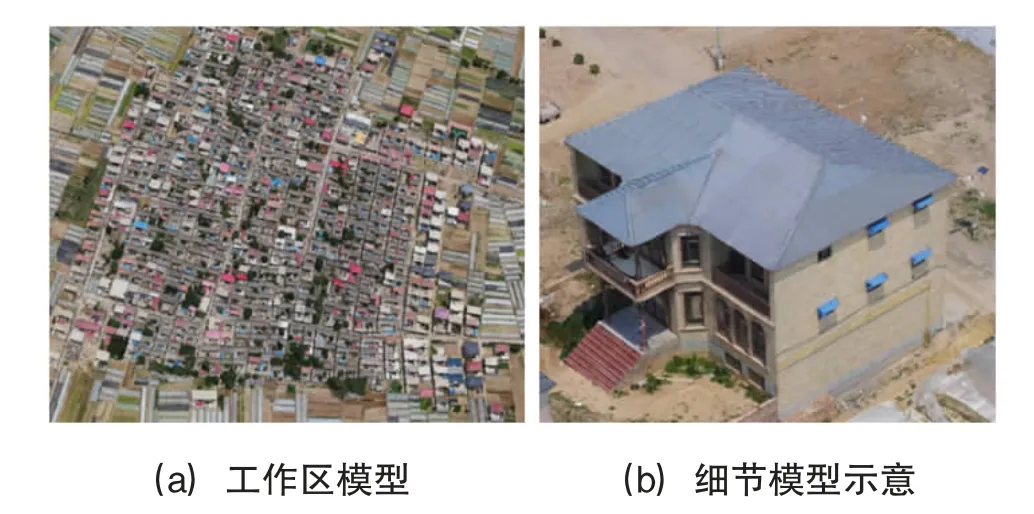
图2 实景三维模型示意图
3.4 大比例尺测图
从垂直、倾斜等不同角度采集影像,形成倾斜模型后,利用EPS 倾斜摄影测图系统基于实景三维模型数据进行矢量数据采集,形成三维矢量化示意图,见图3。测图内业主要采集房角点及部分房屋附属设施点,为充分验证内业测图的精度,将前期外业采集的部分房角点展入测图系统,从三维场景中观察,绝大部分的外业坐标都在实景模型的角上。并通过利用三维模型对房屋的特征轮廓和点状地物进行矢量制图,包括高程点的提取、操作过程中地物要素国标的实时编码、所有要素的矢量制图,最终经过图形整饰形成大比例尺地形图。
3.5 精度评定
1∶500 比例尺测图完成后,根据野外实地测量点(以明显特征点进行测量)作为检核点,与基于无人机大比例尺测图点位对比,见表1 的误差精度评定表。
根据表1 误差精度评定进行分析,基于无人机大比例尺测图技术的平面误差与高程误差满足于1∶500 测图规范要求,符合精度标准。
4 结束语
本文论述无人机航测系统的组成,探究其测图关键技术,并经过实例进行验证,得出以下结论。
1) 基于无人机航摄系统采集影像数据,制作实景三维模型,实现地形数据的矢量化,在大比例尺测图上的应用是可行的,其测量精度满足测图规范要求。
2) 无人机大比例尺测图技术不仅实现了测图目的,而且其过程数据丰富了测绘成果,形成了实景三维模型,矢量图与三维模型结合进行后期使用线划图更加直观。
3) 对比传统大比例测图方法,无人机大比例尺测图技术降低成本投入的同时,生产效率大大提高,对于复杂区域数字测图的生产,以无人机代替人力采集数据,安全系数更高。
综上所述,无人机大比例尺测图技术在项目生产中具有很大优势,外业数据采集较快,但如何提高内业数据处理效率,如何提高影像数据质量和空中三角测量数据质量,需要进一步研究。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
华人时刊(2021年23期)2021-03-08
电子制作(2018年11期)2018-08-04
北方音乐(2017年4期)2017-05-04
测绘科学与工程(2016年5期)2016-04-17
电子设计工程(2015年3期)2015-02-27
旅游纵览(2014年8期)2014-09-10
焦点(2014年3期)2014-03-11
河南科技(2014年14期)2014-02-27
测绘科学与工程(2014年2期)2014-02-27