
变电站无人机巡检系统研究与应用
2024-01-10 16:12刘文平许文政马云飞
电器工业 2024年1期
陈 就 刘文平 石 欣 许文政 马云飞
(南方电网广东中山供电局)
0 引言
随着用电负荷快速增长和智能化运维水平的发展,传统的人工巡检、机器人巡检、人工控制无人机巡检或远程视频巡检等手段已经无法满足需求,具体表现在存在巡视盲区、需要专用巡检通道、效率较低、成本较高等,给变电站安全稳定运行带来新的挑战[1-2]。
针对变电站巡视存在的问题,电力巡检无人机具有可靠性高、巡检成本低、便于智能化管理等优势,对变电站巡检工作有着重大意义。变电站无人机巡检系统以提高巡检自动化与智能化为目标,巡视范围包括巡视盲区,对于推进数字电网的建设有积极的作用。电力巡检无人机巡视作业具备安全性高、检测精度高、巡视范围广、成本低、效率高的优势[3-4],可以对设备进行全面检查,通过高清的可见光和红外图像对变电站进行检测,发现变电站设备缺陷与异常,及时为运维人员提供精准的设备信息,有效避免设备停电事故,提高变电站巡检工作效率。
当前,国内针对变电站无人机巡检系统领域开展了相应研究,文献[5]测试了在北斗高精度定位服务下,变电站无人机可以在狭小空间内安全有效地进行巡检作业;文献[6]设计了一种变电站无人机巡检系统,对于变电站设备表计识别有一定的借鉴意义;文献[7]设计了一种变电站无人机巡检模拟仿真系统,具有自主飞行、智能控制等功能;文献[8]设计了一种无人机机场结构改造方案,可作为无人机机场建设的参考方案;文献[9]对无人机安全距离和放电观测进行试验,确定了无人机作业安全距离的方法。上述系统存在缺陷不能自动识别、智能化水平低、巡视工作量大等问题,无法及时发现设备隐患,不能有效提高变电站无人机巡检效率。
为了解决上述变电站无人机巡检系统的不足,本文采用3D 建模技术、航线规划技术、高精度定位技术和图像识别技术,提出并研制了变电站无人机巡检系统,实现了无人机按航线自主巡视,自动判断设备温度异常,智能识别表计读数,及时发现设备的缺陷,提高了变电站巡检效率,满足变电站智能化、精益化运维需求。
1 变电站无人机巡检系统结构与功能设计
1.1 系统结构设计
变电站无人机巡检系统由生产系统、无人机监控系统、航线规划系统、综合数据网、办公电脑、通信设备、无人机机场、机场控制器、无人机组成,系统结构如图1 所示。

图1 变电站无人机巡检系统结构
生产系统负责变电站无人机巡视工作计划管理,将巡视计划推送至无人机监控系统,作业结束后,从无人机监控系统反馈作业完成情况。
无人机监控系统具有综合展示、实时监控、巡检管理、缺陷管理、数据中心等功能。可实现变电站三维点云数据展示,巡视航线的上传,航线任务的下发与执行,巡视数据的查看与分析,巡检计划自动关联任务航线等功能。系统将任务航线下发至机场执行端,无人机巡视数据自动回传至无人机监控系统。对无人机拍摄的照片(可见光和红外图像)进行实时画面或者结果诊断分析,发现缺陷立即上报至生产系统。系统对机场、无人机设备进行实时监测,在巡检任务或者计划执行的过程中,有效地对隐患、异常、故障等设备的特殊情况进行快速处理。
航线规划系统利用变电站点云和实景三维模型绘制无人机巡视航线,将航线下发至无人机监控系统。
综合数据网实现变电站无人机巡视作业相关数据通信,为变电站无人机巡视工作提供实时、可靠、安全的数据传输网络。
通信设备主要包括交换机、防火墙设备、通信线缆等设备。无人机与无人机机场通过无线电波传输信号,无人机机场通过通信线缆在综合数据网与交换机、防火墙设备进行通讯,且无人机监控系统可以与电力数据库进行交互。
无人机机场采用换电机场,可实现无人机自主换电,内置四块电池,基本能满足无人机的不间断飞行。通过无人机监控系统远程将巡视任务下发至无人机机场,再由无人机机场转发,作业人员现场或远程确认。基于无人机机场可实现无人机自主执行飞行任务,具有可见光、红外的设备参数采集、巡视媒体(视频、照片)数据回传保存等功能。
机场控制器接收航线任务后自动发出语音提示,提醒作业人员现场确认。
电力巡检无人机实现在无人机机场上自主起降,并按预设航线自动完成巡检任务,利用其配置的高清摄像机和红外成像设备采集变电站设备巡检数据,相关数据实时传输至无人机监控系统。
1.2 功能设计
变电站无人机巡检系统实现电力巡检无人机远程指挥,全方位定点定位巡视,巡视数据批量处理与有效管理,表计、红外图片等设备缺陷智能识别等功能,其主要功能如下。
1)电力巡检无人机按航线自主巡视。运维人员采用相位偏移测距、点云数据着色、GPS 定位等技术建立高精度的变电站三维实景、可见光模型,然后根据三维模型、运维策略巡视要点在航线规划系统绘制航线,无人机按预设的航线自主巡视。无人机具有RTK 模块,接收差分数据进行解算,可获得实时、动态、厘米级定位服务;具有抗电磁干扰能力,能在变电站电磁干扰区域作业;无人机机型小,可在设备间隔穿梭。
2)无人机监控系统自动识别设备异常。电力巡检无人机搭载高分辨率双光镜头(红外、可见光),作业过程中将照片实时回传至无人机监控系统,系统利用智能算法诊断识别设备异常。
3)智能分析应用、巡视报告自动生成。无人机监控系统对同类设备的照片数据进行大数据分析,诊断设备异常是否存在隐患并对异常状况预警。巡检报告内容包括巡视照片数量、巡视时间、无人机状态评估、设备异常分析等。
2 变电站无人机巡检系统关键技术
2.1 3D 建模技术
3D 建模技术采用倾斜摄影建模技术和激光雷达建模技术。首先采用倾斜摄影建模技术可获取变电站的实景模型,该技术采用基于倾斜摄影的高、中、低三层模型叠加算法构建方法,流程包含基础图片拍摄、模型构建、图片补充、图片叠加计算等过程。将高处与中低空照片一起解算后,可得到较高质量实景模型,某110kV 变电站实景模型如图2 所示。然后采用地基雷达对变电站进行高精度三维建模。地基雷达可以进行360°旋转,对设备进行激光雷达扫描,获取变电站点云模型。在扫描的同时,地基雷达同时进行拍照,实现点云数据着色。由于地基雷达采用GPS 进行定位,绝对位置存在一定偏差,因此需要在变电站选取至少三个特征点,并用RTK 无人机获取特征点精准定位坐标,将这三个特征点对原始模型绝对坐标进行校正后,就可以获取精度误差为5cm 的高精度点云模型。最后将实景模型与点云模型进行叠加,可得到高精度的3D 模型,变电站3D 叠加模型如图3 所示。

图2 变电站实景模型
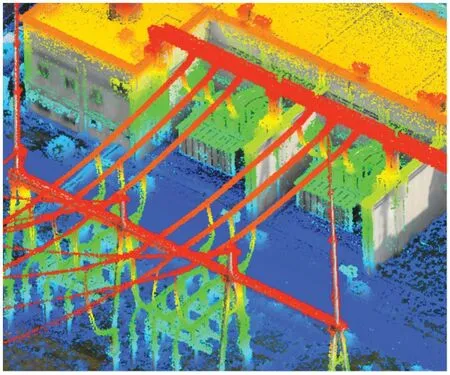
图3 变电站3D 叠加模型
2.2 航线规划技术
电力巡检系统采用航线规划技术进行变电站巡视航线编制。航线规划流程包括分区规划、部件点选取、辅助点增加、航点顺序调整、安全性判别、航线验证等过程,首先是按间隔对变电站设备进行分区,对每个分区进行航线规划;然后,按照航线规划标准和航线规划软件中预览图进行拍摄点选取,并对拍摄的距离,角度进行调整;无人机会依次在航点间飞行,因此需要增加辅助点防止无人机在两个航点间飞行时误碰设备,用于绕开构架,实现飞行安全;接下来,调整各个航点的顺序使巡视航线最短;进行安全性判别寻找安全距离不足的飞行危险点,并进行调整;最后是进行现场验证,确定巡视安全性和巡视质量,变电站航线规划流程如图4 所示。
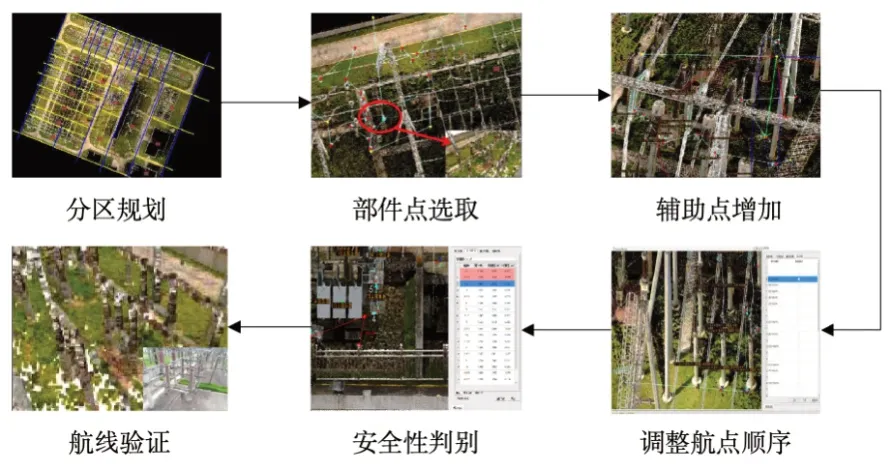
图4 变电站航线规划流程
2.3 高精度定位技术
变电站中主变、电容、电抗等设备存在电磁干扰,为降低电磁对无人机飞行的影响,电力巡检无人机中的定位装置需具备抗电磁干扰功能,且变电站设备布局较为密集,需要提供一种高精度定位技术。
电力巡检无人机采用高精度定位技术,具体是一种实时动态载波相位差分技术(Real Time Kinematic,RTK),内部集成千寻CORS 网络,将高精度导航定位系统与高性能成像系统集成在无人机机身中,将基准站采集的载波相位求差解算坐标[10]。RTK 采用了载波相位动态差分方法,在变电站实现厘米级高精度定位,实现抗电磁干扰、高精度定位功能,确保无人机巡视数据稳定传输。
2.4 图像识别技术
电力巡检系统采用快速景象匹配算法。首先,输入专家图库和无人机拍摄的设备实时图像,对图像进行预处理,以保持实时图像的稳定性,有利于特征向量的提取;然后对拍摄的设备图像进行特征提取,提取出来的特征向量与专家图库进行特征匹配,删除匹配错误的数据;最后,构建图像矩阵,发现设备异常时立即输出诊断信息,图像识别算法流程如图5所示。

图5 图像识别算法流程
图像识别技术识别的准确率与专家图库覆盖范围与特征向量提取的准确率有关。以变电站变压器套管设备、表计识别为例介绍,常用变压器套管包括主变变高套管、变中套管、变低套管、中性点套管,无人机拍摄表计主要包括SF6表、油位表、油温表等,根据设备特征建立专家图库。
可以根据SF6表指针所指示角度判断压力值,这样可以比较准确地识别出指针所指的刻度。
3 应用实例
变电站无人机巡检系统已应用于中山供电局68个变电站,覆盖了所有户外变电站,运维人员只需在办公电脑上即可启动无人机巡视任务,远程监控无人机作业情况,自动生成巡视报告,实现了电力巡检无人机按航线自主巡视、自动判断设备温度异常、智能识别表计读数等功能。
无人机巡检系统能智能识别设备,自动判断设备温度异常,如图6 所示,主变变高接线掌温度(A 相48.55°C、B 相65.35°C、C 相47.45°C),自动识别了主变变高接线掌B 相发热缺陷。

图6 红外图像缺陷识别
无人机巡检系统能智能识别表计读数,如图7 所示,自动识别了主变变高开关SF6表读数为0.61MPa(额定值为0.6MPa)。

图7 可见光表计图像识别
变电站无人机巡检系统的应用有效节省了人力、物资与时间,提高了变电站运检工作效率,解决了电网规模增长与运维人员紧缺的矛盾。
4 结束语
本文研制的变电站无人机巡检系统集成应用了3D 建模技术、航线规划技术、高精度定位技术、图像识别技术,实现了无人机按航线自主巡视,自动判断设备温度异常,智能识别表计读数,及时发现设备的缺陷,验证结果表明电力巡检无人机执行变电站巡检任务,可以代替部分人工巡视内容。并且采用图像识别技术对变电站内设备发热、表计读数进行智能识别,自动上报缺陷,在很大程度上提高了变电站巡检效率。
猜你喜欢
环球时报(2023-02-28)2023-02-28
小哥白尼(神奇星球)(2021年12期)2021-03-08
铁道通信信号(2020年3期)2020-09-21
新高考(英语进阶)(2017年11期)2018-01-22
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
测绘科学与工程(2016年6期)2016-04-17
创新作文(小学版)(2016年31期)2016-03-11
