碳减排政策下的农机装备智能优化作业研究
2024-01-09 09:46张航程马忠辉何舒卉
农机化研究 2024年4期
张航程,马忠辉,何舒卉
(1.武汉城市学院,武汉 430075;2.东风乘用车有限公司 制造管理部,武汉 430058)
0 引言
我国是人口大国,农业生产在国民经济中占有举足轻重的地位。随着科技的发展,机械化农业装备的使用有效提高了农业作业效率,减少了农民的工作量。但是,传统的农机装备仍然主要依赖人力进行调整控制以及农作物、环境状态等的监测[1-2],无法有效保证农业生产的标准化、精细化和效率化。另一方面,传统的农机装备还是能源消耗大户,在作业过程中的温室气体排放量大,造成的高能耗、高污染问题对环境和人类健康造成了巨大的威胁;同时,煤炭、石油等化石能源价格不断上涨,人类正面临能源危机,故改变当前农机装备现状迫在眉睫。
农机装备智能化是指装载有微型电脑和信息化通信系统的农业机械,通过远程控制实现对农机装备的智能化管理。与传统的农机装备相比,智能化系统可以对农机进行调整和控制,替代了人工操作部分,使农机能够适应作业环境,不仅改善了工作环境、提高了作业效率,而且可以有效保证农业生产的标准化、精细化和效率化[3]。
碳减排是世界各国能源战略发展的重点,我国为实现碳减排目标陆续出台了低碳相关的扶植政策。低碳农业是以碳减排作为主要目标,通过发展可再生能源、加强基础设施等方式转变农业生产模式,得到高效、低能耗和低排放的农业。通过利用新能源为农机装备提供主动力,如利用太阳能为温室大棚提供电能和热能以及利用风能进行农业灌溉等[4],可以有效降低化石燃料造成的污染,减少碳排放。因此,本文在在碳减排政策下对农机装备的智能优化进行了研究。
1 硬件设计
1.1 总体设计
目前,灌溉系统是应用最为广泛的农机装备之一。采用太阳能自动灌溉系统可以同时实现节水和碳减排,且其太阳能装置和自动控制系统还可以应用于其他农机装备,故以太阳能自动灌溉系统为例进行农机装备的优化。
太阳能自动灌溉系统的主要组成包括供电系统、自动控制系统、监测和显示系统、抽蓄水系统及通讯系统,如图1所示。

图1 太阳能自动灌溉系统结构简图Fig.1 The structure diagram of solar automatic irrigation system
1.2 供电系统
供电系统主要用于为灌溉系统的运行提供动力,主要包括太阳能面板、蓄电池、稳压器、逆变器、直流变换器和辅助电源。为了延长电池寿命,还增加了充放电控制器。供电系统结构如图2所示。
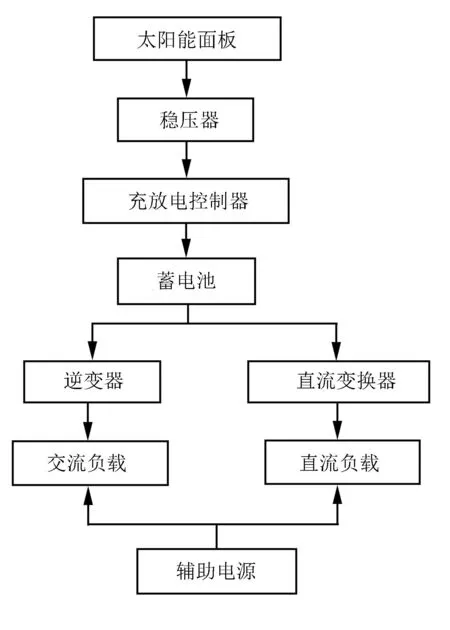
图2 供电系统结构简图Fig.2 The structure diagram of power supply
太阳能面板利用光电效应,通过半导体光电二极管将辐射的光转变为电能,产生电流;发电以后的电能可以直接给其他的设备供电,多余电量则储存至蓄电池。
蓄电池用于将太阳能面板产生的多余电量存储起来,在雨天或者夜晚可以继续为设备供电[5]。
由于光照强度不同,太阳能电池板不能持续提供稳压电流,为了保护设备的正常作业,需要利用稳压器将其转变为稳压电流。
逆变器用于将直流电转变为交流电,同时还具有升压功能。直流变换器则是将电压分压,以保证不同负载的设备使用。
在南方的梅雨季节,长时间的无光照导致蓄电池的电量用尽,设备无法运行。为此,系统设置了一个接口,用于紧急情况时连接辅助电源,保证系统正常运行。
1.3 自动控制系统
自动控制系统用于实现对灌溉系统的智能控制,主要组成包括单片机、传感器信号处理模块、人机交互模块以及AD转换模块。其中,单片机是整个灌溉系统的核心处理单元,负责接收各传感器经AD转换模块后的数据并分析处理,再驱动执行装置实现灌溉。单片机采用低功耗、抗干扰且高速的STV89C516RD型号单片机,如图3所示。

图3 单片机结构图Fig.3 The structure diagram of MCU
1.4 监测和显示系统
监测系统用于实时监测温度、湿度和管道压力是否处于最佳状态,以便及时做出响应。监测系统主要组成为土壤湿度传感器、相对湿度传感器、热电阻PT100温度传感器、全数字式温度传感器、水位控制器、压力传感器和光照度传感器。其中,土壤湿度传感器和光照强度传感器采集电路图如图4所示。

图4 电路图感器Fig.4 Circuit diagram
显示系统用于实时显示灌溉系统的作业状态以及农作物的生长环境,同时对灌溉系统进行操作。显示系统采用触摸屏作为人机界面,在通讯接口上采用Modbus协议[6],该接口可以适用于不同的产品。
1.5 抽蓄水和灌溉执行系统
抽蓄水系统主要用于为灌溉系统提供水源,包括水泵和蓄水池。若蓄水池内仍有水,则采用水泵抽水灌溉;若蓄水池内水已用完,则自动采用自来水灌溉。
若灌溉区域较小,灌溉执行系统可采用灌溉管网的方式,其结构简图如图5所示。若灌溉区域大,则可以采用喷灌、微喷灌等方式。

图5 灌溉管网结构简图Fig.5 The schematic diagram of irrigation pipe network structure
1.6 通讯系统
通讯系统主要用于将农作物灌溉节点的温湿度、光照等信息进行采集并传递,使控制系统可以准确、实时并稳定地监控作物生长环境是否在最佳状态,以便自动控制系统做出反应。通讯系统采用成本较低、复杂度低、数据传输稳定且快的ZigBee无线通信的方式进行信息的传递,其算法如图6所示。

图6 ZigBee无线网络路由算法图Fig.6 ZigBee wireless routing algorithm diagram
2 智能节水控制算法设计
灌溉系统在作业时,无法精确得到灌溉过程的数学模型,而模糊控制器则不需要了解精确的数学模型,仅通过经验即可对模糊控制器进行设计,因故采用模糊控制器对智能灌溉系统进行控制[7-8]。
2.1 模糊控制器结构和组成
模糊控制器主要包括两种,即常规和自校正模糊控制器。为了降低系统误差,提高控制精度和鲁棒性,系统采用自校正模糊控制器结构,如图7所示[9]。
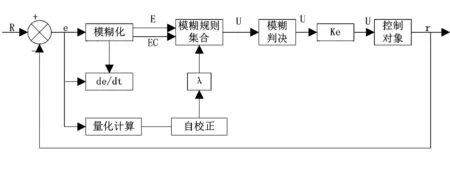
图7 自校正模糊控制器结构简图Fig.7 The structure diagram of self-correcting fuzzy controller
模糊化过程是利用模数转换器将监控系统采集的数据转化为数字量,并作为输入值传递至单片机;然后,通过模糊化函数将转化到论域范围的输入值定义成语言,形成模糊集合;最后,利用模糊控制器进行推理并进行控制。
对于灌溉系统,模糊化函数采用控制较为稳定的梯形隶属度函数。模糊逻辑推理方法采用多输入模糊推理方法进行计算,该方法的语言规则是“如果A且B,那么C”以及“现在是A′且B′”。该语言规则用数学方法表示为
μA(p)∧μB(q)→μC(ω)
其模糊关系矩阵为
R=AB×C
用玛达尼推理,矩阵表示为
R=[μA(p)∧μB(q)]∧μC(ω)
通过推理得到结果为
C=(A′andB′)∘[(AandB)→C]
=[A′∘(A→C)]∩[B′∘(B→C)]
该推理方法的隶属度函数为
μC(ω)=(αA∧αB)μC(ω)
输入值经过推理后得到的是一个模糊集合,无法驱动执行机构,还需要将模糊集合通过精确化过程转化为精确数值。本系统采用重心法进行数值的精确,即将输出的模糊集合以隶属度函数曲线表示。该曲线与坐标轴共同围成了封闭区域,区域重心即为数值精确后的结果。其中,连续域的数学表达式为
离散域的数学表达式为
2.2 智能节水模糊控制器设计
智能节水模糊控制器为单输出的二维模糊控制器,主要对土壤湿度进行控制,其结构如图8所示。

图8 智能节水模糊控制器结构简图Fig.8 Structure diagram of intelligent water-saving fuzzy controller
图8中,r为土壤湿度设定值;y为土壤实际湿度;t为采样周期。
该控制器的检测参数为土壤湿度,土壤湿度误差e、误差变化率ec作为输入变量,电磁阀控制量μ为输出变量。通过该模糊控制器可以实现灌溉系统的自动控制。
3 试验结果
为了验证太阳能自动灌溉系统的性能,对其进行了试验。自动灌溉系统是否能够正常作业,主要取决于其信息传递是否准确以及自动控制系统是否可以精确控制。因此,在进行试验设计时主要包括数据传输试验和自动灌溉控制试验。
3.1 数据传输试验
选取一片农田,将传感器均匀布置于农田内部,监测农田在24h内的土壤湿度、土壤温度以及光照度;然后,人工测试土壤的湿度、温度,并将显示屏上的读数与人工测试结果进行对比,结果如表1所示。
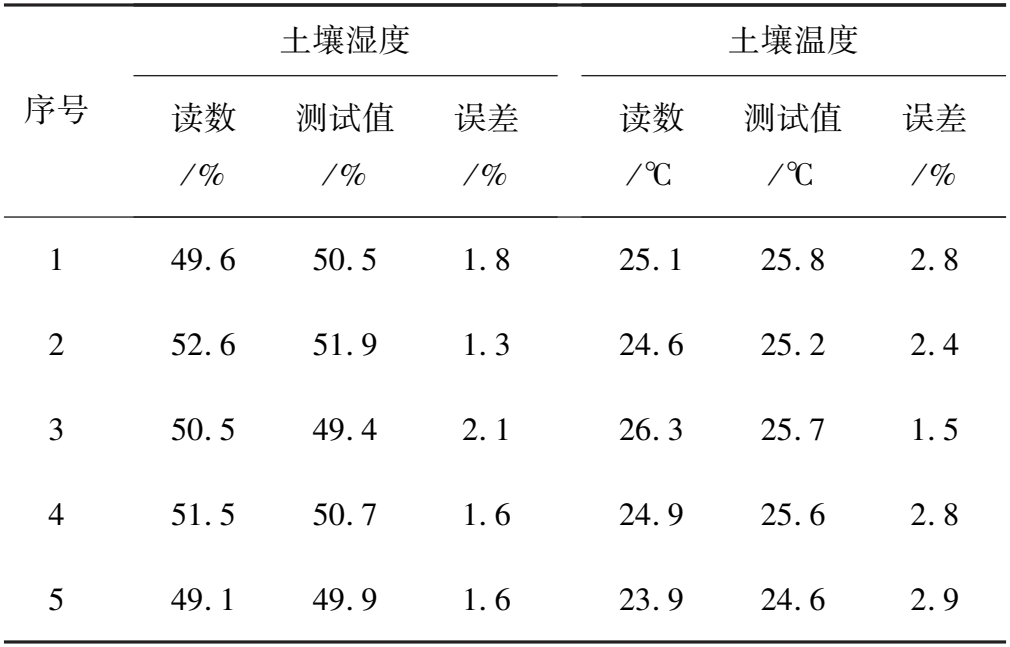
表1 数据传输试验结果
由表1可知,显示屏的读数与人工测试结果的误差均不大于3%,说明数据获取和传输准确可靠。
3.2 自动灌溉控制试验
首先,将该灌溉系统布置于封闭环境,设置系统的最佳湿度,然后,人工调整土壤的湿度,测试系统是否可以自动实施灌溉。设置数据与测试数据对照如表2所示。
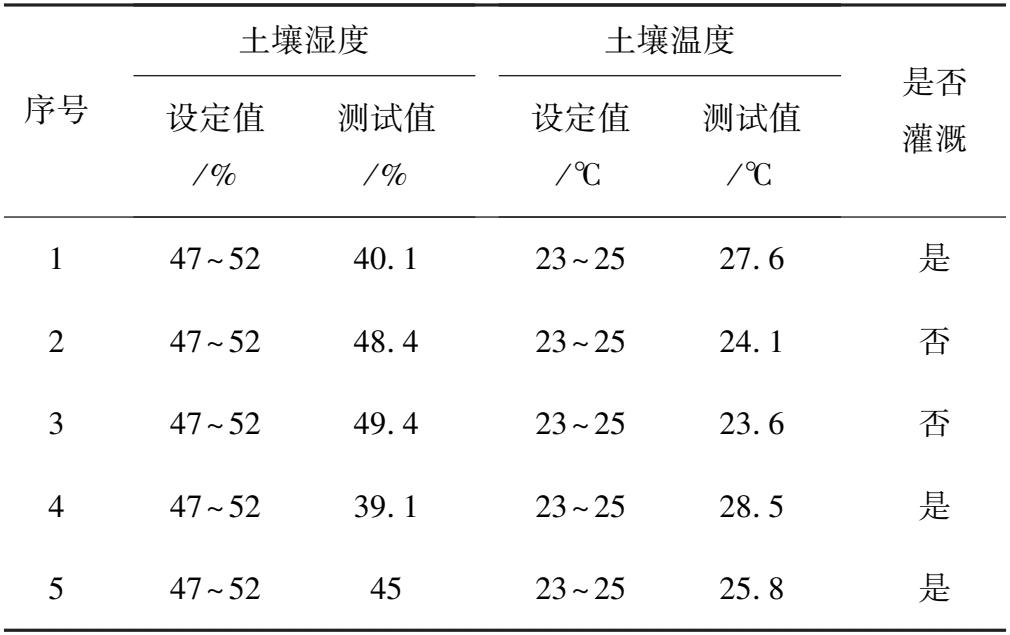
表2 自动灌溉控制试验结果
由表2可知:系统能够根据土壤湿度自动启动灌溉,可以实现自动控制的功能。
4 结论
1)针对我国农机装备能源消耗过大导致温室气体排放多、智能化程度较低的问题,以太阳能自动灌溉系统为例,在碳减排政策下对其进行智能优化研究。系统的主要组成包括供电系统、自动控制系统、监测和显示系统、抽蓄水系统以及通讯系统。
2)自动灌溉系统采用模糊控制器进行控制,对模糊控制器的结构、组成和算法进行了设计。
3)为了验证该系统性能,对其进行了数据传输和自动灌溉控制试验,结果表明:系统可以实现对灌溉的智能控制,且太阳能供电装置还可应用于其他农机装备。
猜你喜欢
云南农业(2021年10期)2021-10-22
云南农业(2021年9期)2021-09-24
云南农业(2021年8期)2021-09-06
云南农业(2021年3期)2021-04-24
天津农林科技(2020年3期)2020-08-13
湖北农机化(2020年4期)2020-07-24
电子制作(2019年15期)2019-08-27
电子制作(2018年23期)2018-12-26
通信电源技术(2018年3期)2018-06-26
高原山地气象研究(2016年4期)2016-02-28