带式输送机更换托辊用皮带举升机构设计与应用
2024-01-08 00:52田立勇陈洪月
工程设计学报 2023年6期
田立勇,唐 瑞,于 宁,陈洪月
(辽宁工程技术大学 机械工程学院,辽宁 阜新 123000)
随着带式输送机的高速发展,许多行业都选择带式输送机作为主要运输工具。带式输送机具有运输能力强、成本低、操作简单和自动化程度高等特点,是煤矿生产运输环节的重要组成部分[1]。煤矿智能化建设提高了矿产资源的开发效率,带式输送机的运输强度随之增大。输送机在井下长时间高强度运行易发生故障,若故障不及时排除,则会严重制约生产效率,甚至会发生安全事故。因此,提高带式输送机的维修效率具有重大意义,是煤矿智能化建设进程中亟待解决的技术问题。
托辊故障是带式输送机最常见的故障之一。以王家岭煤矿主平硐带式输送机为例,其运输距离长达12.8 km,托辊损坏频繁,维修频率高,每年更换的托辊数量为7 000 个左右。由于输送机工作环境的限制,现有的托辊更换技术和设备单一,传统的人工更换托辊方式存在很大的局限性,更换效率低,安全风险高,且停机维修需要耗费大量时间,严重影响生产效率[2]。
针对上述问题,笔者团队提出了一种更换托辊机器人,以取代传统的托辊更换方式,从而实现在带式输送机不停机的状态下更换托辊,避免托辊损坏后未能及时更换所造成的皮带损伤及安全事故等风险,减少输送机工作故障。这对保证煤矿生产的连续性和提高煤炭生产安全性具有重要意义[3]。
举升皮带是不停机更换托辊的关键步骤,须将皮带举升到足够高度以使其与托辊分离,保证拆卸和安装托辊有足够的操作空间。传统的方法是在带式输送机停机状态下清理完皮带上方的物料后才能举升皮带,主要有以下2种方式:1)用电动葫芦配合链条将皮带吊起来;2)用千斤顶将皮带顶起来。由于带式输送机的载荷大且作业空间狭窄,维修人员采用传统举升方法时操作不方便,工作效率低;此外,维修人员作业时需要接触皮带,存在较大的安全隐患[4]。
然而,在带式输送机不停机状态下举升皮带是个技术难点。笔者拟设计一种新的皮带举升机构,以实现在带式输送机不停机状态下举升皮带,确保皮带举升高度满足要求且输送机平稳、安全地运行,从而提高托辊更换效率,减少维修人员作业风险和劳动强度。首先,通过分析带式输送机的作业环境和更换托辊机器人的功能需求,确定皮带举升机构的结构特征和举升方式,并对其结构进行详细设计;然后,基于带式输送机的参数计算举升皮带的工作载荷,并对皮带举升机构进行受力分析,同时开展运动学仿真及静力学仿真;最后,开展地面试验和井下试验,以验证皮带举升机构设计的合理性和可靠性。
1 皮带举升机构功能分析与结构设计
带式输送机托辊更换作业是煤矿维修的日常工作,为实现在不停机状态下更换上部槽形托辊组,以解决停机停产问题[5],本文设计了如图1所示的更换托辊机器人,其主要由行走机构、姿态调整平台、伸缩平台、机械手和皮带举升机构等组成。
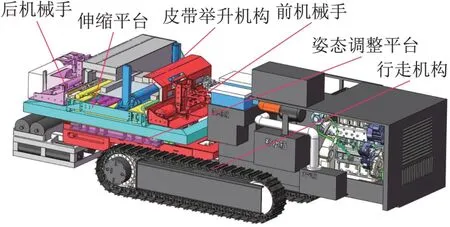
图1 更换托辊机器人结构组成Fig.1 Structure composition of idler replacement robot
行走机构可为更换托辊机器人提供远距离作业的条件,其配有国Ⅲ防爆柴油发动机和液压泵等,能同时携带6个托辊,有效地减轻了维修人员在巷道内远距离作业时的劳动强度,提高了维修效率。
姿态调整平台可根据井下作业环境的变化实时调整机器人的姿态,为不停机更换托辊提供合适的作业条件,以保证安全、快速地更换托辊。
伸缩平台通过多级伸缩来实现更换托辊机器人从带式输送机一侧伸入到输送机机架中,在保证机器人与皮带及机架保持安全距离的情况下,将机器人工作平台搭建在皮带下方。
前、后机械手主要用于拆卸和安装带式输送机上部3个不同位置的托辊。
皮带举升机构是更换托辊机器人的重要组成部分,承担在带式输送机不停机状态下举升皮带的关键作用。皮带举升机构的设计难点在于:结构尺寸要符合作业环境的要求,且举升高度及承载能力要满足更换托辊的功能需求。
如图2所示,在带式输送机中,皮带最低点距机架纵梁仅196 mm 左右,空间狭小。根据更换托辊机器人的功能需求,皮带要举升至400 mm以上。如图3 所示,带式输送机槽形托辊组由3 个托辊组成,托辊架支撑皮带呈V形姿态,中间托辊与侧托辊的夹角为35º[6];输送机机架纵梁外侧间距为1 850 mm;皮带主要承重位置为中间位置,皮带两端由侧托辊控制形成槽形结构,以避免物料散落。通过分析输送机及其托辊架的结构发现,空间限制因素较多,对更换托辊机器人皮带举升机构的尺寸要求严格,这对皮带举升机构的结构设计和加工有巨大影响。
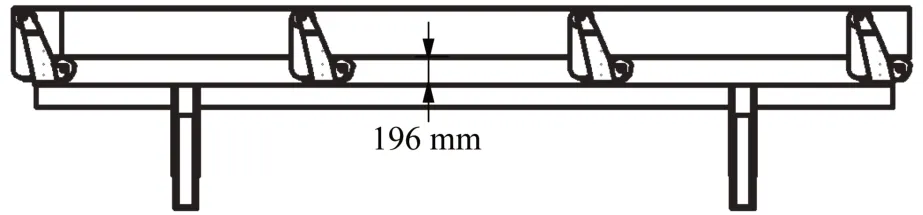
图2 带式输送机结构示意Fig.2 Structure schematic of belt conveyor
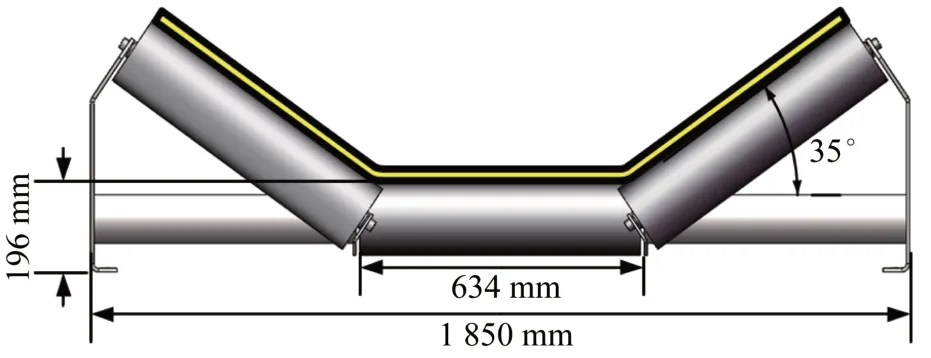
图3 槽形托辊组结构示意Fig.3 Structure schematic of groove-shape idler group
根据更换托辊机器人的工作原理确定皮带举升机构的主要功能,具体如下:
1)举升皮带。在带式输送机不停机的状态下,机器人伸缩平台能安全进入皮带下方,并将皮带举升至400 mm 以上,旨在为机械手更换托辊提供足够的操作空间。
2)保证带式输送机平稳运行。确保皮带在举升过程中呈平稳上升姿态,且皮带举升后仍可正常运行。
为实现上述功能,同时考虑到更换托辊机器人和带式输送机的空间限制,拟设计2种举升方案并进行对比分析。
方案1:采用摆动式举升机构,以液压摆动油缸为驱动,将托辊架由水平放置状态转动至竖直状态,通过托辊架转动后的高度变化来实现皮带的举升。摆动式皮带举升机构的结构如图4所示,主要包括摆动油缸、伸缩油缸、中间托辊架和侧托辊架等。其中,伸缩油缸控制侧托辊架移动,侧托辊架收缩时可将皮带举升机构放置在皮带下方,伸展时能增大与皮带的接触面积;由摆动油缸旋转带动中间托辊架绕油缸轴线转动90º,实现皮带的举升。

图4 摆动式皮带举升机构三维模型Fig.4 Three-dimensional model of swing-type belt lift‐ing mechanism
方案2:以剪叉结构作为皮带举升机构的主体,保证中间托辊架和侧托辊架在举升油缸的作用下实现联动,达到举升皮带的目的。剪叉式皮带举升机构的结构简图如图5所示,包括1个原动件(举升油缸7)、2 个滑块(油缸滑块6,8)以及5 根连杆(剪叉臂1,2,4,5 和托辊架3)。在举升过程中,举升油缸7推动油缸滑块6,8向两侧移动,剪叉臂2绕铰接点H旋转,并通过中间铰接点B受力使剪叉臂1 绕铰接点A转动,同时剪叉臂2 绕铰接点C转动。在所受载荷均匀分布的情况下,该皮带举升机构左右两侧的运动对称。举升油缸输出主动力,各元件受力传动,托辊架3上、下移动,实现皮带举升机构的升降[7]。
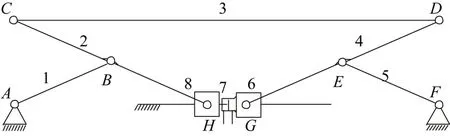
图5 剪叉式皮带举升机构结构简图Fig.5 Structure sketch of scissor-fork belt lifting mecha‐nism
剪叉式皮带举升机构的三维模型如图6 所示。结合原托辊架的结构特点,采用槽形托辊组的结构,以确保皮带在举升过程中保持平稳。考虑到皮带举升机构的工作环境,在非工作状态下,侧托辊架可绕剪叉臂顶点转动至竖直状态,以节省空间并避免与其他设备碰撞;在初始工作状态下,侧托辊架与中间托辊架均水平放置,确保举升机构与皮带之间有足够的安全距离,随后侧托辊架随剪叉臂同步运动;当中间托辊架上升至最高点时其与侧托辊架的夹角约为35°,与原托辊架结构相似,消除了举升皮带时煤料从皮带两侧掉落的风险;皮带举升到最高位置时油缸滑块两侧受底板结构限位,保证举升机构在承载状态下保持平衡,避免因物料偏载而影响举升效果。
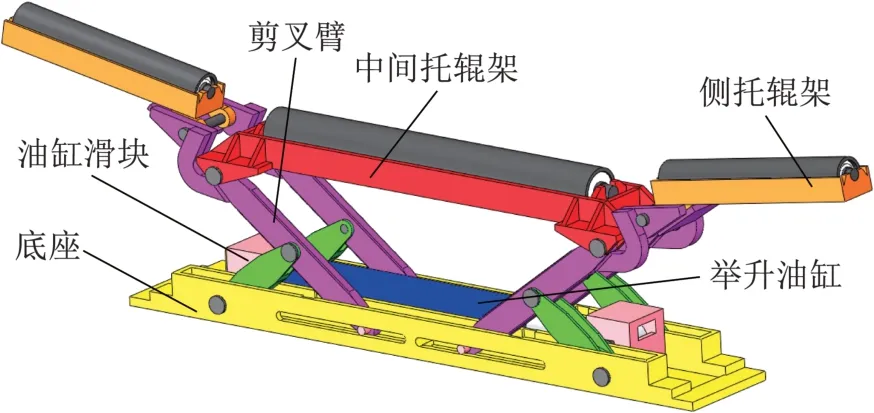
图6 剪叉式皮带举升机构三维模型Fig.6 Three-dimensional model of scissor-fork belt lift‐ing mechanism
通过对比2 种举升方案发现,方案1 机构不仅需要较大的空间尺寸,而且对油缸转矩的需求大,相较于方案2缺点明显;方案2机构的结构紧凑,油缸选型较为方便,且举升方式更平稳可靠。由此,确定采用剪叉式皮带举升机构结构方案。
2 皮带举升机构受力分析
以王家岭煤矿主平硐带式输送机为研究对象,根据表1所示的关键参数,分析举升皮带的工作载荷以及皮带举升机构的受力情况[8]。
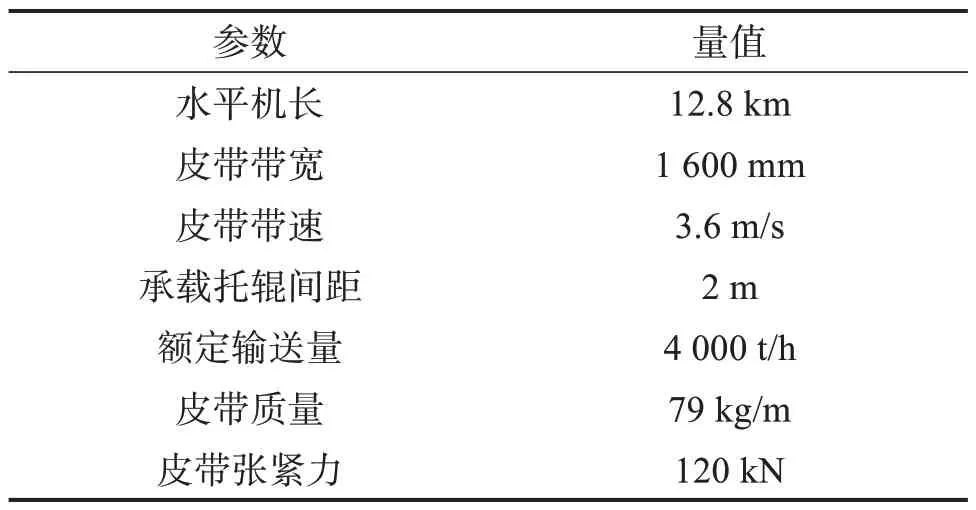
表1 带式输送机关键参数Table 1 Key parameters of belt conveyor
根据带式输送机皮带的举升原理,对举升皮带的工作载荷进行分析,其主要包括物料重力、皮带重力和皮带张紧力等。对各部分载荷进行计算,即可得到举升皮带的工作载荷。
单位长度皮带所承载的物料质量q为:
式中:Q为带式输送机额定输送量,t/h;v为带式输送机运行速度,m/s。
假设在皮带举升过程中,皮带的最大举升高度为Hm,皮带与相邻两侧托辊分离,皮带与水平方向的夹角为θ,两侧托辊架中心的距离L=6 m,对皮带张紧力进行分析。如图7所示,由于皮带张紧力在水平方向上相互抵消,因此主要考虑皮带的竖直张紧力F1。
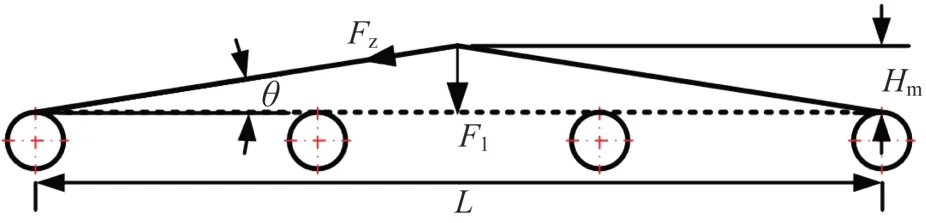
图7 皮带张紧力分析Fig.7 Belt tension force analysis
根据图7,皮带的竖直张紧力F1为:
式中:Fz为皮带张紧力,N。
由式(2)可知,F1的大小受θ的影响,而θ随皮带举升高度的增大而增大。根据带式输送机的参数,设皮带最大举升高度Hm=204 mm,通过计算得到θ=3.68°,此时对应的F1值最大。
在带式输送机运行过程中,由于皮带举升机构所受的载荷较大,而托辊质量较小,故可忽略托辊重力。由此可知,皮带举升机构在竖直方向上所受的载荷即为举升皮带的工作载荷[9]。假设中间托辊承受的载荷为37%物料重力、67%皮带重力和皮带竖直张紧力,侧托辊承受的载荷为31%物料重力、17%皮带重力和皮带竖直张紧力[10]。
由此可得,中间托辊承受的静载荷和动载荷分别为:
式中:P1为中间托辊承受的静载荷,N;为中间托辊承受的动载荷,N;e为载荷系数,取e=0.8;q2为单位长度皮带的质量,kg/m;fs为运行系数;fd为冲击系数;fa为工况系数。
根据ISO标准,带式输送机上物料的截面形状如图8所示,物料截面顶部呈抛物线状。

图8 带式输送机上物料截面形状示意Fig.8 Schematic diagram of material cross-sectional shape on belt conveyor
在输送机实际工作过程中,需要保证皮带侧面有一定的空间,避免物料从侧面溢出散落。当皮带带宽S≤2 000 mm 时,皮带空边距l1的最小值符合以下函数关系:
在带式输送机上部槽形托辊组中,中间托辊与侧托辊在支撑皮带时呈平缓变化状态,托辊间几乎没有间隙。假设中间托辊长度为l[11],由此可计算得到侧托辊的有效承载距离l2:
则侧托辊承受的静载荷和动载荷分别为:
式中:P2为侧托辊承受的静载荷,N;为侧托辊承受的动载荷,N。
在带式输送机运行过程中,皮带始终与托辊接触,由于皮带重力、物料重力和皮带竖直张紧力的作用,皮带下表面被压陷在托辊上,产生了具有迟滞特征的压陷变形,进而在水平方向产生了阻力。托辊受力情况如图9 所示,其中K为皮带对托辊的作用力,其竖直方向分力为举升皮带的工作载荷,水平方向分力为皮带对托辊的压陷阻力[12]。

图9 托辊受力分析Fig.9 Force analysis of idler
根据图9所示的皮带与托辊的接触情况,压陷阻力与举升皮带的工作载荷之间的关系为[13]:
其中:
式中:Fi为压陷阻力,N;D0为托辊直径,mm;ψ为阻尼系数;η为刚度系数。在本文中,皮带材料为橡胶,托辊材料为钢,其接触面的阻尼系数取0.57,刚度系数取2 855。
由上文对举升皮带的工作载荷的分析可知,对于托辊来说,作用在托辊上的压力由皮带重力、物料重力及皮带张紧力来确定。物料的特性不同于流体,物料的主动作用和被动作用均会影响力的分布,因此托辊所受的压力总和大于皮带和物料的重力之和。
基于图8所示的物料分布情况,为计算压陷阻力,假设托辊表面的压力分布如图10所示,中间托辊表面压力P'1均匀分布,侧托辊表面压力P'2由0 N到最大值呈线性增大(皮带纵向视作挠性体,压力分布与实际情况较为符合)。
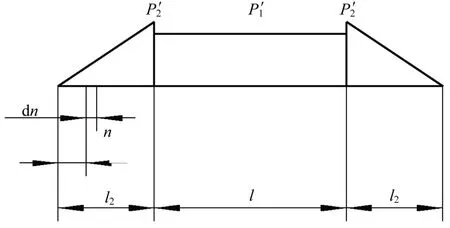
图10 托辊表面压力分布Fig.10 Pressure distribution of idler surface
由图10可知,中间托辊所受的压陷阻力Fi1为:
侧托辊所受的压陷阻力Fi2为:
则槽形托辊组的总压陷阻力Fi为:
此外,托辊与皮带之间存在摩擦作用,由于托辊与皮带为滚动摩擦,摩擦力较小,通常可忽略。因此在研究托辊与皮带之间的接触问题时主要考虑皮带作用在托辊表面上的竖直压力。
剪叉式皮带举升机构通过剪叉臂之间的相互作用来实现皮带举升动作。举升状态下剪叉式皮带举升机构的结构简图如图11 所示,对其进行受力分析。
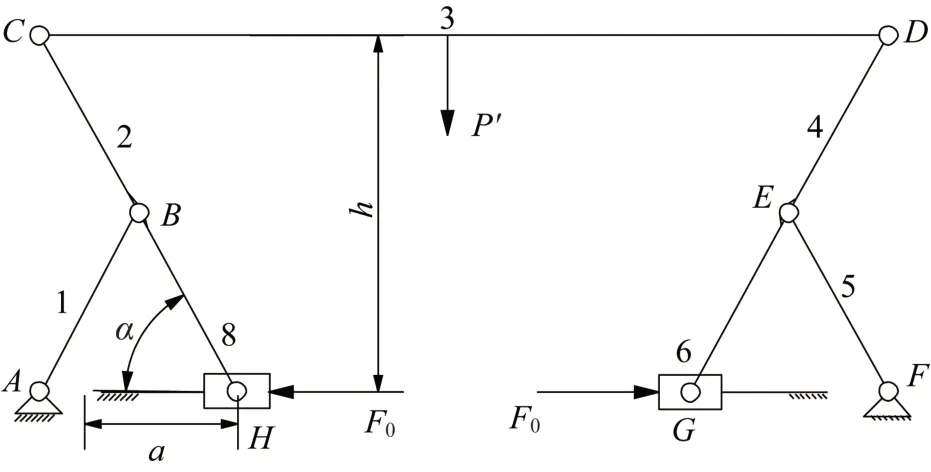
图11 剪叉式皮带举升机构举升状态示意Fig.11 Schematic of lifting status of scissor-fork belt lifting mechanism
根据图11中的几何关系,可得:
式中:a为油缸滑块的水平位移;r为剪叉臂1的长度,剪叉臂2的长度为2r;α为剪叉臂2与水平面的夹角;h为中间托辊架的高度。
由虚位移原理可知:作用在质点系中的所有力对其虚位移做的虚功之和为零[14-15]。设推力F0作用产生的虚位移为da,外加载荷P′产生的虚位移为dh,对式(13)和式(14)进行求导,可得:
根据虚位移公式,可得:
联立式(15)至式(17),可得:
假设载荷分布均匀,即无重大偏载情况,鉴于皮带举升机构的剪叉结构具有对称性,故针对剪叉结构一侧进行受力分析。各剪叉臂受力分析如图12所示。为方便分析,将剪叉臂1与剪叉臂2的铰接点标记为B′和B。
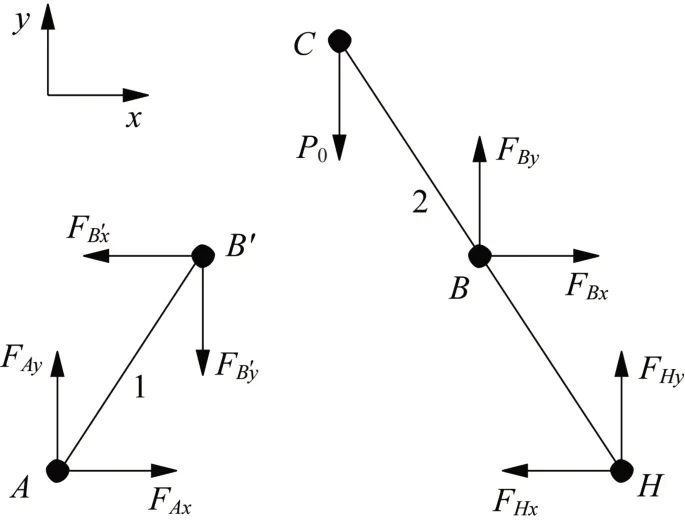
图12 剪叉臂受力分析Fig.12 Force analysis of scissor arm
将剪叉臂1,2视作整体进行分析,其所受的载荷为P0(P0=0.5P′)。将铰接点A、H沿x、y方向所受的力分别记作FAx、FAy、FHx、FHy,则根据受力平衡,可得:
由于剪叉臂1与剪叉臂2在铰接点B(B′)处所受的力为相互作用力,故有:
结合式(18)和图10、图11,可得:
根据受力平衡关系,可知剪叉臂1,2分别在x、y方向上受力平衡,故可得:
根据剪叉臂1与剪叉臂2在铰接点B(B′)处所受的力矩等于0 N·m,可得:
联立上述公式,解得:
3 皮带举升机构运动学仿真分析
由上文分析可知,皮带举升机构在举升皮带时,要确保中间托辊架、侧托辊架、剪叉臂运动的平稳性。根据所选的举升油缸,保证合适的输出速度以确保皮带举升机构运行过程平稳、可靠。为了验证所设计的剪叉式皮带举升机构的可行性,采用SolidWorks Motion模块对其进行运动学仿真,并观察其在运行过程中的姿态变化[16]。
剪叉式皮带举升机构的初始姿态如图13(a)所示,此时托辊架处于最低位置。在举升油缸的作用下,机构姿态发生变化,侧托辊架的姿态随剪叉臂的运动逐渐变化。如图13(b)所示,2个侧托辊架完全升起时呈V形,与槽形托辊组形状一致,实现了皮带的举升。皮带举升机构由初始姿态运行至最终姿态用时5 s,故下文对0—10 s 内机构的升降运动进行分析。
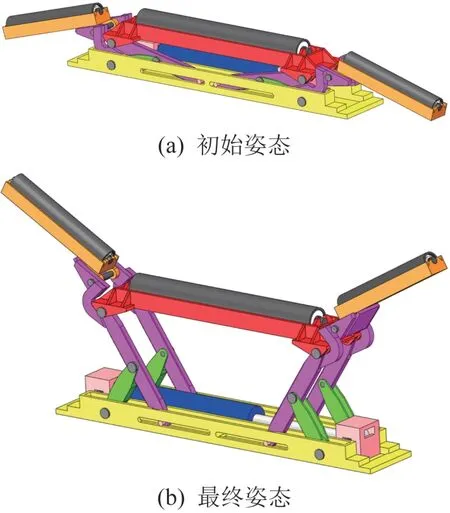
图13 剪叉式皮带举升机构的初始和最终姿态Fig.13 Initial and final posture of scissor-fork belt lift‐ing mechanism
为实现皮带举升的仿真分析,在SolidWorks Motion 模块中设置皮带举升机构的运动仿真参数。通过力学分析,选定举升油缸的规格型号为φ63-35,根据油缸参数确定其伸缩时间。在SolidWorks Motion 模块中设置举升油缸的运动曲线,如图14所示。

图14 举升油缸运动曲线Fig.14 Motion curve of lifting cylinder
皮带举升机构在运动过程中呈连续多姿态变化,因此主要对托辊架的竖直位移和剪叉臂的角速度及角加速度进行研究。由于皮带举升机构各剪叉臂在运动过程中的角速度与角加速度基本一致,故取其中一条剪叉臂进行分析。利用SolidWorks Motion模块对皮带举升机构进行运动学仿真,得到中间托辊架的竖直位移曲线及剪叉臂的角速度和角加速度曲线,分别如图15和图16所示。由图15可知,中间托辊架在举升油缸作用下逐渐升高,运动过程平缓。由图16 可知,在0—10 s 内,剪叉臂的最大角速度和角加速度分别为35 (°)/s,127 (°)/s2。结果表明,剪叉式皮带举升机构在上升和下降过程中运动平缓,其剪叉臂的角速度和角加速度无明显突变,说明该机构无干涉状况,验证了其结构设计的合理性和可行性[17]。
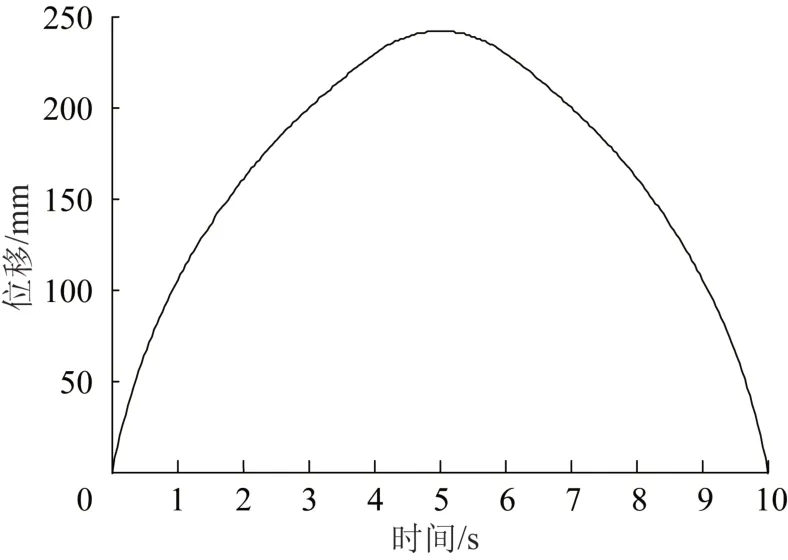
图15 中间托辊架的竖直位移曲线Fig.15 Vertical displacement curve of intermediate idler frame
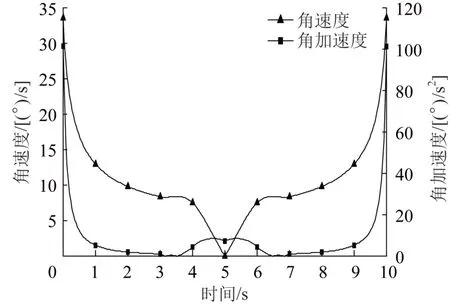
图16 剪叉臂的角速度和角加速度曲线Fig.16 Angular velocity and angular acceleration curves of scissor arm
4 皮带举升机构静力学仿真分析
为验证所设计的剪叉式皮带举升机构的可靠性,通过静力学仿真来分析其强度和刚度。在ANSYS Workbench 有限元软件中建立皮带举升机构的有限元仿真模型,施加边界载荷条件,通过运算得到其应力与变形结果,以分析结构的可靠性。在实际工作中,皮带举升机构中托辊架内部的受力非常复杂。为了便于分析运算,对皮带举升机构的局部结构进行相应简化,如简化小倒角、尖角以及密封装置等[18-19]。
首先,将构建的剪叉式皮带举升机构三维模型导入ANSYS Workbench有限元软件,并输入表2所示材料的参数。
然后,在Design Modeler 模块中对皮带举升机构三维模型进行简化处理。考虑到计算时间和准确度,将举升油缸设置为刚体。采用自动网格划分和六面体网格划分方式,得到皮带举升机构的有限元网格模型,如图17所示,该模型共包含141 946个单元。
最后,定义约束条件,采用接触设置和连接副进行约束。为使仿真结果更加准确,分别设置中间托辊和侧托辊所受的动载荷,经计算得到P′1与P′2分别为16 559,4 435.9 N;载荷施加位置为托辊与皮带接触表面,约占托辊面积的1/6[20]。
通过静力学仿真分析得到皮带举升机构的等效应力云图,如图18所示。结果表明:该皮带举升机构的最大等效应力位于侧托辊架与剪叉臂的连接处,为142.8 MPa,远小于材料屈服强度355 MPa,符合强度要求。
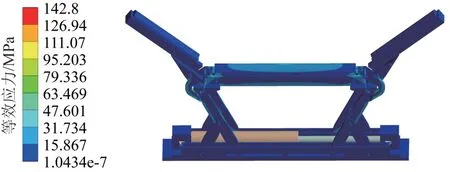
图18 剪叉式皮带举升机构等效应力云图Fig.18 Equivalent stress cloud map of scissor-fork belt lift‐ing mechanism
通过静力学仿真分析得到皮带举升机构的变形云图,如图19所示。结果表明,该皮带举升机构的变形呈对称分布,由中间托辊架到侧托辊架端部位置呈逐渐增大的趋势。这主要是因为在举升过程中,两端载荷使侧托辊架端部承受较大压力而产生变形;最大变形量为1.209 7 mm,变形较小,满足强度要求[21]。
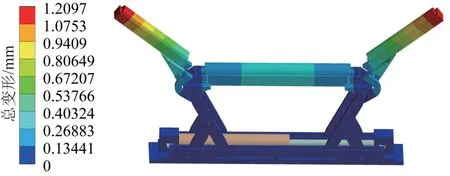
图19 剪叉式皮带举升机构变形云图Fig.19 Deformation cloud map of scissor-fork belt lifting mechanism
5 皮带举升机构性能试验
5.1 地面试验
为测试剪叉式皮带举升机构的承载能力,在地面上搭建试验平台,以对其主体结构进行初步试验。采用千斤顶施加载荷,以模拟举升皮带的工作载荷,对皮带举升机构的承载能力进行测试。
在图20所示的地面试验平台中,将木块垫在托辊架与千斤顶之间,千斤顶上方顶住钢筋纵梁,通过千斤顶施压来调整作用在皮带举升机构上的工作载荷,并采用压力表检测载荷大小。测试在20~60 kN 载荷条件下,皮带举升机构整体长时间保持支撑状态时有无明显变形和其他异常状况。同时,采用LVDT位移传感器测量中间托辊架的位移变化情况,传感器放置于中间托辊架下方,用于测量不同载荷下中间托辊架竖直位移的变化量。

图20 皮带举升机构地面试验现场Fig.20 Ground test site of belt lifting mechanism
经现场多次测量得到中间托辊架竖直位移的实测值,并与对应的仿真值进行对比,结果如表3所示。由表3可知,该皮带举升机构主体结构的承载能力符合设计要求,实测数据与仿真结果的误差较小,证明了所构建的仿真模型与分析具有可行性和准确性。
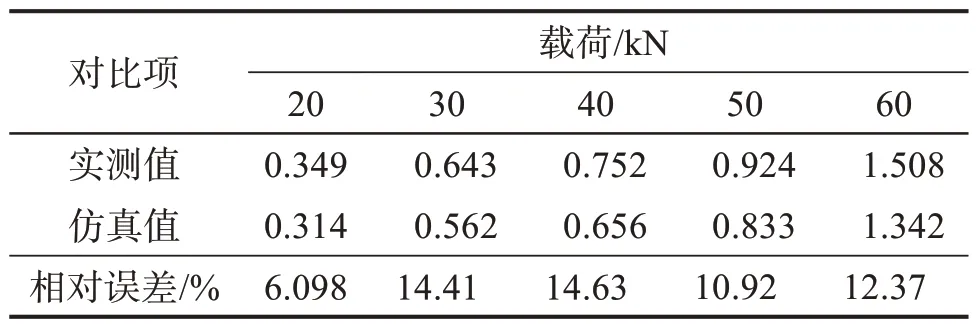
表3 不同载荷下中间托辊架的竖直位移对比Table 3 Comparison of vertical displacement of intermedi‐ate idler frame under different loads 单位:mm
5.2 井下试验
为验证剪叉式皮带举升机构的实际性能,于2022年8月在中煤华晋集团王家岭煤矿开展井下试验。分别在带式输送机停机和工作状态下对更换托辊机器人进行试验,先进行停机试验,再进行不停机试验,以保证试验过程安全可靠。更换托辊机器人井下试验现场如图21 和图22 所示。其中,图21为停机状态下皮带的举升过程,图21(a)为未举升状态,图21(b)为举升过程中间状态,图21(c)为举升完成后,图21(d)为举升后非行人侧视图。图22 为工作状态下皮带的举升过程,图22(a)为准备举升阶段,图22(b)为举升中间阶段,图22(c)、图22(d)为举升完成阶段。带式输送机工作状态下非行人侧不得有人员进入,因此工作状态下主要以行人侧视角观察皮带的举升情况。通过观察试验现场可知,带式输送机在工作状态下皮带上方物料分布与理论分布接近,不存在严重偏载状况。为保证试验结果的准确性和真实性,皮带举升机构性能测试在带式输送机不同位置处开展,并在不同的输送机速度和载荷下进行多次试验。试验结果表明,所设计的皮带举升机构在多种速度和不同载荷条件下均能安全平稳地将皮带举升,且举升过程中皮带上方物料无侧倾和掉落,皮带举升后带式输送机运行正常,试验效果达到预期。

图21 停机状态下井下试验现场Fig.21 Underground test site in shutdown state
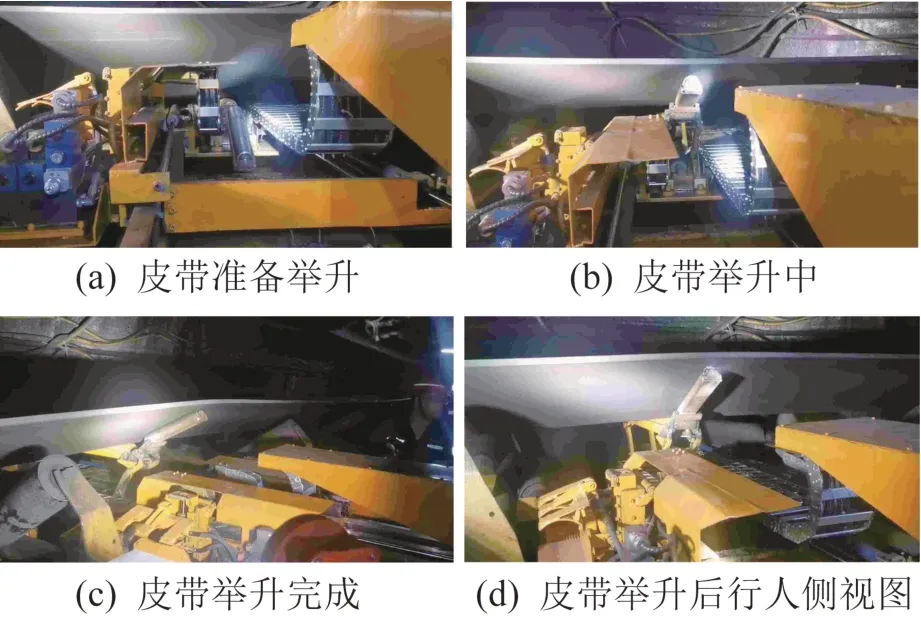
图22 工作状态下井下试验现场Fig.22 Underground test site under working condition
由于井下环境限制,为保证试验安全和测量准确,皮带举升高度的测量须在带式输送机停机状态下进行。如图23所示,利用卷尺对举升后皮带与托辊的距离进行测量,其最小距离能够保证机械手有足够操作空间即说明皮带举升机构的设计符合要求。
图24所示为重载条件下皮带举升机构举升皮带的高度变化曲线(图中位置“0”表示机构举升位置)。结果表明,实际测得的皮带最大举升高度为241 mm,说明所设计的皮带举升机构可满足更换托辊机器人的需求,能够保证机械手安全快速地拆卸和安装托辊。
6 结 论
1)以王家岭煤矿主平硐带式输送机为研究对象,提出了一种可以实现不停机更换托辊的机器人,并设计了剪叉式皮带举升机构。同时,根据带式输送机的参数,计算了举升皮带的工作载荷,并对皮带举升机构进行了受力分析。
2)利用SolidWorks Motion 模块对皮带举升机构进行了运动学仿真分析,得到了中间托辊架和剪叉臂的运动曲线。结果表明,中间托辊架的举升高度最高可达240 mm;剪叉臂的最大角速度为35 (°)/s,最大角加速度为127 (°)/s2;皮带举升机构的速度在升降过程中未发生突变,说明其运动过程无干涉状况,验证了机构设计的合理性和可行性。
3)采用ANSYS Workbench 有限元软件对皮带举升机构进行了静力学仿真分析。结果表明,机构的最大变形量为1.209 7 mm,可忽略变形量对机构的影响;机构的最大等效应力出现在剪叉臂与托辊架的连接处,为142.8 MPa,小于材料的屈服强度,说明机构的刚度和强度均符合设计要求。
4)通过地面试验对皮带举升机构在20~60 kN载荷条件下的承载能力进行了测试。结果表明,机构具有足够的承载能力。分别在带式输送机停机和工作状态下开展了井下试验,结果表明,皮带的最大举升高度为241 mm,达到预期效果,可满足更换托辊机器人的功能需求,验证了皮带举升机构能实现在带式输送机不停机状态下举升皮带并保证输送机稳定运行。
剪叉式皮带举升机构的成功应用是不停机更换托辊机器人的关键技术突破,减少了带式输送机运行故障,有利于保障煤炭生产的连续性和提高煤炭生产效率。此外,本文采用理论分析与仿真相结合的方式开展研究,有效地降低了研发成本和周期;所设计的皮带举升机构结构紧凑,举升能力强,伸展性好,适用于小空间、大高度的举升环境,可为其他设备举升机构的设计与应用提供参考。
猜你喜欢
机械管理开发(2020年11期)2020-04-15
冶金设备(2019年6期)2019-12-25
制造技术与机床(2019年11期)2019-12-04
山东冶金(2019年3期)2019-07-10
铜业工程(2018年6期)2019-01-07
公民与法治(2016年4期)2016-05-17
橡胶工业(2015年6期)2015-07-29
橡胶工业(2015年2期)2015-07-29
同煤科技(2015年2期)2015-02-28
河南科技(2014年22期)2014-02-27