高速公路配电房智能巡检机器人系统的设计与应用
2024-01-08 07:05:12黄柳盛
西部交通科技 2023年10期
黄柳盛
(广西交通投资集团百色高速公路运营有限公司,广西 百色 533099)
0 引言
高速公路配电房位于高速公路电力系统的末端,其运行的质量关系着每个站点的收费、监控系统等,甚至影响整条高速公路系统的运行。由此可见,配电房日常的运行维护工作应该得到极大的重视。然而,由于广西的地势原因,一些高速公路配电房的分布除了常见的收费站和服务区,还包括大量偏远隧道变电所的配电房。依据传统专人值守人工巡检的方式,意味着需要大量的电力专业人员进行配电房的日常巡检,才能保证高速公路的正常运行。然而,电力人才储备匮乏[1]、巡检工作人员技术水平良莠不齐,使得配电房的日常巡检无法得到充分保障,甚至会出现漏检,无法及时发现故障隐患的现象。因此,高速公路配电房需要一种更加安全可靠、成熟完善、能够代替传统人工巡检的新兴配电房巡检手段。
近年来,国内开始了关于电力巡检机器人的研究,关于电力巡检机器人的研制已具备成熟技术条件,且高速公路配电房布局较为统一固定,因此通过引入巡检机器人代替传统的人工巡检,以保证高速公路电力系统的稳定运行是成熟可行的。本文的研究模型通过无缝滑环型导轨进行取电,可实现全天候的巡视,也可依据需求进行周期性巡视。该模型沿轨道精确定位检测点,通过搭载的传感器采集设备参数、环境信息,实现视频监控、仪表的智能读取以及信息传输等功能[2],代替人工方式巡检,提高巡检效率和安全性,达到“自动化减人”的目的。
1 架构设计方案
电力巡检机器人系统如图1所示,主要由后台控制系统和轨道式巡检机器人两部分构成。巡检机器人通过搭载视频、温湿度、红外等多种传感器,采集数据并由无线通信系统传输到管理后台进行数据分析、生成巡检报表,及时反馈配电房设备运行及环境情况,实现检测维修人员的定点维修,从而达到减少运维人员工作量的目的。

图1 配电房智能巡检机器人系统构架图
2 硬件控制电路设计方案
结合配电房巡检的需求,硬件控制系统电路主要采用主从分布式设计结构,如图2所示,包括主控制系统、运动控制子系统、通信子系统、数据采集子系统和供电系统。其中,高清摄像机和红外热像仪的数据采集通过自带的WiFi模块进行传输。
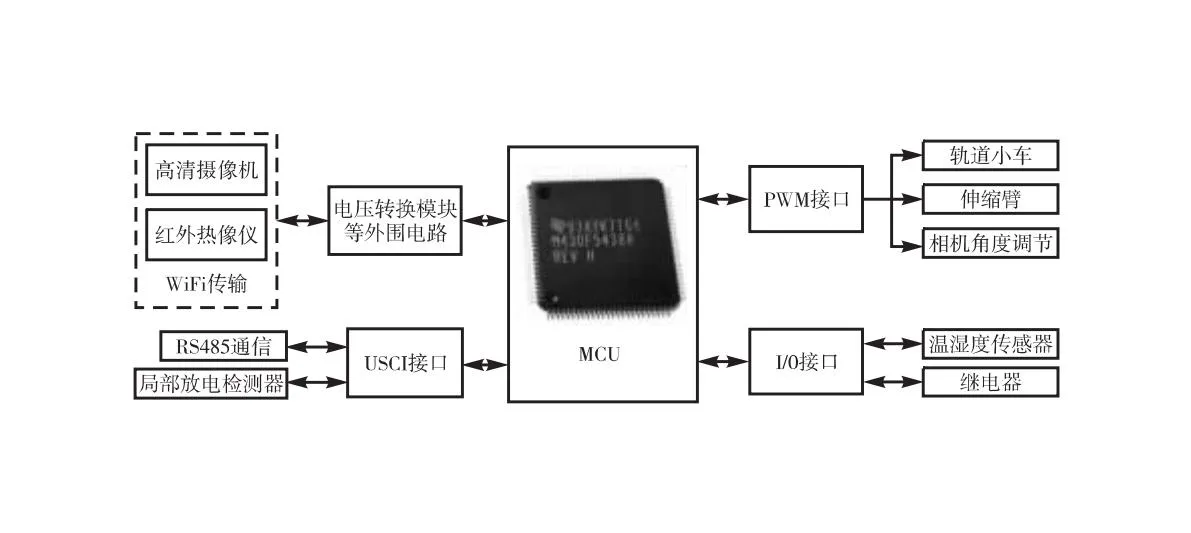
图2 巡检机器人硬件系统构架图
主控制系统:主控系统硬件以MSP430F5438芯片为核心,实现与上位机的通信和编译码、对设备反馈信号进行处理、输出电机驱动信号实现电机速度调控。
运动控制系统:巡检机器人的运动包括滑轨运动、伸缩臂运动以及摄像机的上下摆动,依据主控系统输出的信号驱动各部分的电机,达到全面巡检的目的。
无线通信系统:利用MAX485将主控芯片USCI串行接口输出的TLL信号转换为RS485信号,实现主控芯片的RS485通信,并利用IBF105型RS485转WiFi模块进行modbus RTU和TCP协议的协议转换,以实现巡检机器人和上位机的通信需求[3]。
数据采集系统:在数据采集中,采用罗技Stream Cam高清自动对焦摄像头C898,对柜体的编号、开关的状态、指示灯的颜色、数表的度数和指针等进行图像采集,并通过小波多尺度边缘检测进行灰度特征识别区分开关和采用椭圆拟合法来反映开关、指针的偏转量;采用KB23E31型红外热成像测温仪获取柜体的红外图像和温度;采用HPP805D033型温湿度传感器对配电房的环境温度和湿度变化进行采集;采用超高频和暂态低电压双重检测的方案对柜内的局部放电信息进行采集。
供电系统:设计中采用了无缝滑轨取电的方式,同时为避免滑动接触取电摩擦阻力大、易产生电弧的缺点,设计了停歇式取电的方式,在巡检机器人机箱内置了24 V/2A的锂电池供电,通过电量监测停歇取电的方式保证电池电量≥30%。
3 自动告警系统的实现
自动告警是巡检机器人系统一项不可或缺的关键功能。巡检机器人通过传感器采集现场的数据并进行数据处理和阈值设定,当处理值超出阈值范围时则发生自动告警。在自动告警系统中温度、湿度和局部放电等简单的信号处理和阈值设定是很容易的,但是对图像信号的处理和状态识别是一个复杂的过程,其涉及计算机视觉。在本设计中,对于开关状态、数表读取和指示灯状态等的自动识别或读取主要通过小波边缘检测的灰度特征识别法。
Wφxf(x,y)=f*φx(x,y),Wφyf(x,y)=f*φy(x,y)
(1)
其中,Wφx为图像灰度延x方向的梯度,Wφy为图像灰度延y方向的梯度,*表示卷积。式(1)可记为:
(2)
其中,grad(f*θ(x,y))表示f*φy(x,y)的梯度。因此f(x,y)的小波变换的模Mf(x,y)和幅角Af(x,y)表示为:
(3)
(4)
由梯度定义可得,梯度模的局部最大值的方向就是梯度的矢量方向[4]。因此,由检测到小波变换的模局部最大值即可获得梯度矢量方向,从而获取图像的边缘点,进而与特征模型进行对比实现特征识别,实现开关、数表等状态的读取[5]。
4 后台管理系统设计方案
巡检机器人后台系统界面由系统、监控、控制和查询等部分组成,如图3所示。
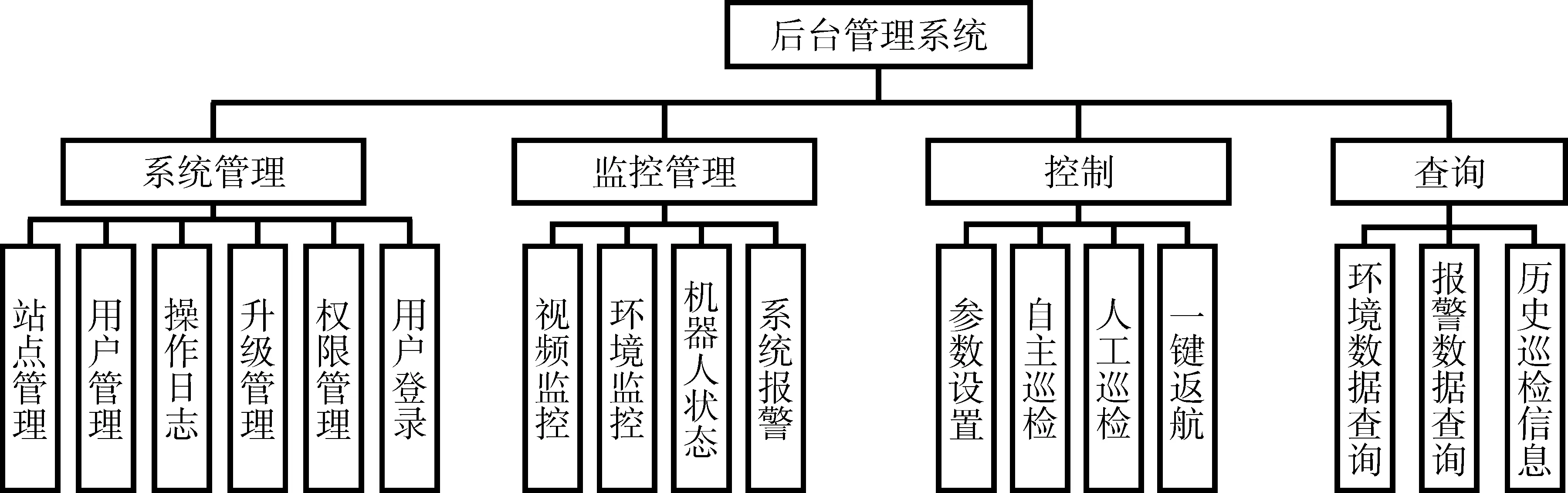
图3 巡检机器人后台管理系统框架图
后台控制系统可对巡检机器人采集的信息进行分析处理。以历史温度分析为例,后台对机柜的每次巡检温度进行趋势变化分析,对比设备负荷量和设备温度的关系,经过数据处理后自动生成报表,若有异常则自动告警,并通过网络转接以短信形式告知用户,经用户判断是否上传给上级部门、由专家团队决策,为设备状态评估和检修提供决策,实现高速路站点设备的运行状态诊断。客户端通过服务器可以对现场巡检机器人进行远程操控,如关键点复查等操作。由此,可以有效缓解广西高速公路配电房多且分散、电力巡检人员匮乏、巡检工作量大的问题[6]。
5 应用试验
为了验证所设计的巡检机器人的可行性,在巴平高速公路的一处机房、配电室合并使用的场地进行了调试。室内平面布置如图4所示。为了全面巡检采用了S形行走路线,全程巡检路线约为15 m。

图4 巡检机器人调试场地平面图(mm)
基于图4的场地,分别对巡检机器人的运动控制、数据采集和续航能力等进行了测试。通过后台管理界面可查看巡检机器人巡检过程中高清摄像机、红外摄像仪、局部放电检测器、温湿度传感器等所采集的实时数据,以及巡检机器人的实时状态,包括运动速度、实时位置和剩余电量等。由监控后台与实际测量结果可得,巡检机器人直线最大运行速度可达30 m/min,定位精度可达5 mm,在平均速度为15 m/min情况下电池续航可达9 h。
由巡检试验结果可得,通过巡检机器人可以快速准确地对配电房的运行现状进行数据采集上传。工作人员通过后台管理可以清楚地了解配电房的现状,当设备出现故障时,维修人员可以实现快速定点维修,从而达到巡检机器人代替传统人工巡检的目的。
6 结语
针对广西境内高速公路配电房巡检的问题,本文提出了一种配电房巡检机器人系统并阐述其设计方案。巡检机器人通过搭载红外热像仪等多个传感器完成对设备的数据采集,并通过小波边缘检测的灰度特征识别实现图像特征的识别和状态的读取,然后通过无线通信模块将数据传输到后台管理站,后台管理站再通过远程控制完成现场的实时监控,进行故障判断和事件预警。现场巡检结果表明,该系统能够快速、准确、可靠地对现场信息进行采集,并及时反馈到后方管理系统,达到了配电房无人值守的目的。
猜你喜欢
消防界(2023年11期)2023-03-12 09:38:18
数学物理学报(2021年6期)2021-12-21 06:24:38
中国交通信息化(2020年8期)2021-01-26 00:51:20
应用数学(2020年2期)2020-06-24 06:02:50
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:52
机电信息(2018年9期)2018-03-29 07:19:40
读者·校园版(2018年3期)2018-01-18 08:12:52
科学与财富(2017年24期)2017-09-06 15:26:22
风采童装(2016年2期)2016-08-02 09:18:38
河南科技(2014年11期)2014-02-27 14:10:03