基于雷达与视频的高速公路数字孪生系统研究
2024-01-08 07:03:40杨玉琳
西部交通科技 2023年10期
陆 璐,梁 杏,杨玉琳
(广西交科集团有限公司,广西 南宁 530007)
0 引言
近年来,为了跟随科技革命的新趋势,高速公路建设了多种业务系统,取得了较好的信息化建设成果。其中,利用摄像头、毫米波雷达、气象传感器等设备,实时感知和监测交通流量、车速、车辆类型、路面状况、天气情况等信息,大幅度增强了高速公路的全息感知能力。然而,实际应用中仍存在问题和挑战:(1)设备监测信息相对独立,无法全面掌握整条路段的情况[1];(2)风险评估应用不足,数据分析结果缺乏直观的效果评估,未形成有效的业务闭环。为此,本文提出了高速公路数字孪生系统设计方案,该方案综合了多源数据融合技术和数字孪生技术,实现了实时监控、预测和优化公路运行状态,提高公路运行效率和安全性。
1 数字孪生技术
数字孪生技术是一种基于数据与模型的融合技术,其可实时将物理实体精准地数字化并映射到数字空间中,从而模拟、验证、预测和控制物理实体的全生命周期过程,以形成智能决策的闭环优化。数字孪生技术在对道路交通通行状况进行分析,为交通管理决策提供准确依据的同时,能够根据交通行为判断和预测可能发生的交通事件和事故风险,实现对原交通参与者的动态监控和精确反馈。借助多种传感器和网络通信技术,数字孪生技术可以实现智能交通系统的全面监控和精细化管理,进而提高交通运行效率和安全性,为智慧高速公路发展提供一种创新解决方案。
2 技术架构
系统整体架构如图1所示。
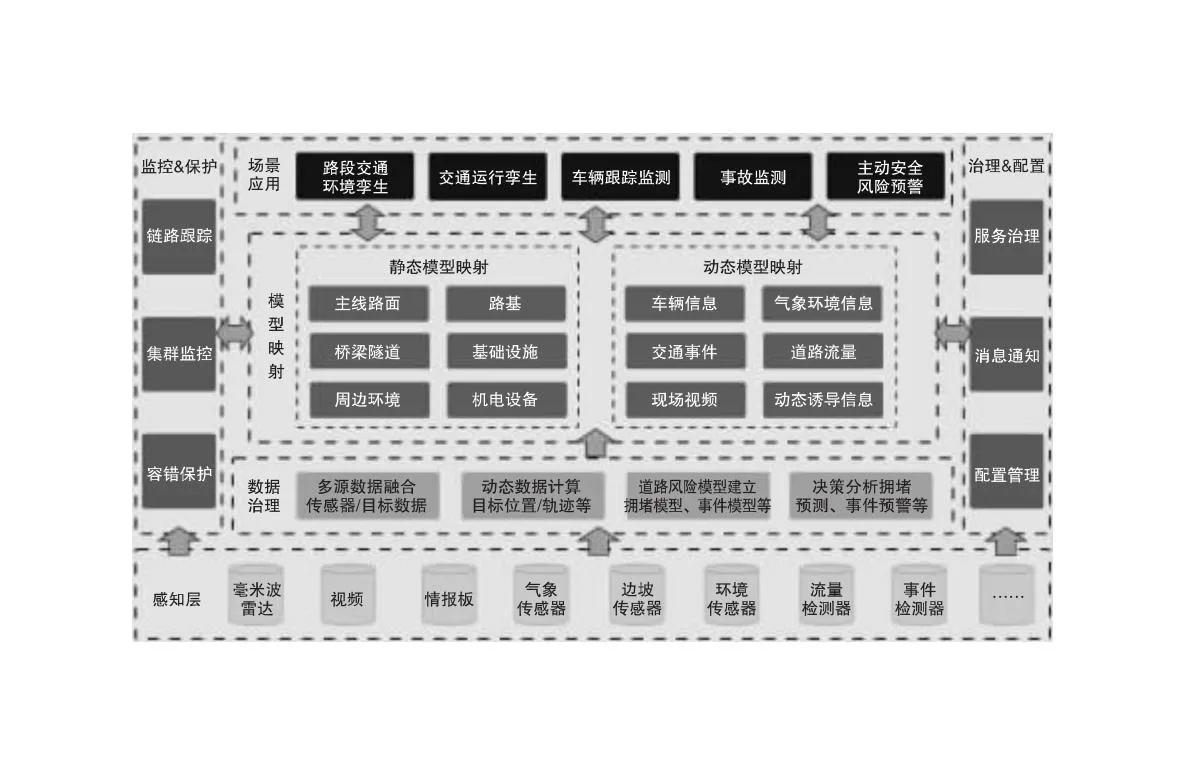
图1 系统整体架构图
2.1 感知层
感知层是数字孪生系统的数据采集端,包括路侧设备如毫米波雷达、视频监控、情报板、气象传感器、边坡传感器、环境传感器等。这些设备产生的数据被收集、整理、存储,为数字世界的场景和模型提供数据准备。
2.2 数据处理层
数据处理层实现对多源感知数据的融合,并提供数据服务以支持模型映射和业务场景应用。通过对动态数据的处理,如车辆的位置、车速、运行轨迹等,结合静态数据如公路资产、设施状态、气象环境等,该层能够分析出道路的车流量、交通事件、畅通与拥堵等状态,为数字孪生系统提供精确的数据支持。
2.3 模型映射层
模型映射层是整个系统的核心支撑层,负责将数据和模型转化为与数字世界对应的场景,包括静态环境映射和动态信息映射。静态环境映射是指路面、路基、隧道、基础设施设备及其周围环境在高速公路上形成的三维立体情景结构;动态信息映射是指静态环境下车辆信息、气象环境信息、交通事件等信息的叠加。
2.4 场景应用层
场景应用层是结合数字孪生技术的特性对业务功能点进行实现,包括对路段交通环境孪生、交通运行孪生、车辆跟踪监测、事故监测、主动安全风险预警等。特别是针对车辆跟踪监测,系统采用基于雷达与视频融合的方法,实现了跨设备的车辆精准跟踪,提升了交通数字孪生的可靠性。
3 关键技术
该系统的关键技术主要有三个方面:(1)利用毫米波雷达深度集成视频,精确追踪车辆动态;(2)通过高精度地图和公路静态资源的映射,实现数字孪生的交通环境;(3)业务场景通过动态信息叠加进行还原。
3.1 雷达与视频的深度融合
雷达与视频深度融合的算法流程主要有三个步骤:
(1)毫米波雷达识别:采用4颗毫米波雷达模块进行级联,实现高精度的车辆和人员等运动目标的探测和跟踪。系统可以在1 000 m范围内实时输出目标的轨迹、方位和距离等信息,并对异常运行轨迹进行快速报警,包括停止、慢速、超速、车道异常偏离等。目标探测的精确性和实时性都通过毫米波雷达的高精度探测跟踪能力得到了提高。
(2)视频车辆目标检测:采用YOLOv3模型的预测框定位算法对实时视频帧的每幅图像进行车辆图像定位。系统筛选出多余的边界框,通过置信度算法对最终目标的中心位置进行标记。利用人工智能中深度学习算法的高效性和准确性,能够在视频中实时检测到车辆目标,为后续的数据融合提供基础。
(3)毫米波雷达在视频上的投影[2]:将毫米波雷达的识别结果与视频目标识别结果进行时间坐标系和空间坐标系的转化和对准。系统利用两种传感器得到的检测框计算交并比(IOU),对检测目标进行匹配融合,得到更精确的目标跟踪信息。充分利用两种传感器的优势,使整个系统的精确度和可靠性得到提高,从而实现目标追踪的深度融合。
3.2 高精度地图与静态资源映射
为了实现交通环境的数字孪生,系统采用高精度地图模型作为基础,将公路基础设施和设备模型与之叠加,并为其赋予业务语义,以支持业务运行。
(1)高精度地图采集与构造[3]:利用点云和无人机航拍图像数据,采用降采样和建模技术生成高精度地图。该地图包含地理信息,可用于在数字孪生中建立高精度的三维模型。
(2)基础设施建模:通过设施模型库对高速公路上常见的设备和设施进行建模,例如摄像头、毫米波雷达、路侧立杆、龙门架、情报板和指示牌等。根据实际世界坐标将相应的模型加载到高精度地图上,以增强数字孪生的真实感和可靠性。
(3)语义信息叠加:除了模型本身的基本信息,还需要叠加业务上应用的常用信息,如管辖区号、桩号、维护单位等,从而增加数字孪生与实际运营场景的匹配度。
3.3 动态数字孪生场景构造
动态数字孪生场景的构造反映的是高速公路运行环境实时的总体动态描述,主要包括:
(1)天气环境:包括白天、黑夜、晴、雨、雾、积水、结冰等情况,不同天气下的能见度和路面状况都会影响道路行驶的安全性和流畅度。
(2)道路环境:包括路侧设备的使用状态、传感器的采集范围、动态情报板显示的内容等。如对于毫米波雷达等传感器,需要展示其采集范围和精度,以及安装位置的高度和角度等。
(3)交通流:包括车牌信息、车辆类型信息、行驶方向信息、车道位置信息以及车辆的行驶速度等信息。这些信息可实时获取,并在虚拟环境中展现出来。例如,根据车辆的位置、速度和方向等信息,可以还原其行驶轨迹。
(4)交通事件:包括计划中的施工养护占道、交通事故以及相应的告警信息发布等。
4 系统功能
4.1 交通环境孪生
基于全自由视觉三维实景仿真,包括高精度车道级还原、传感器设备与交通设施仿真,以及服务区、收费站、隧道管理等应用场景仿真。系统利用高精度地图模型和基础设施模型库,构建一个高度真实的交通环境模型,包括路面、设施、交通标志等元素,可根据实时交通状态进行动态更新。同时系统支持不同天气和时间条件下的实时还原,包括白天、黑夜及晴、雨、雾等情况,以及由于气象引起的路面变化,如积水、结冰等。这样可以在各种场景下进行测试和演练,为运营决策提供参考。见图2~3。

图2 主线路面交通环境孪生示例图

图3 雨雾天气场景示例图
4.2 交通运行孪生
该系统实时获取行驶车辆、行人、异常物体等目标,并能将其实际地理坐标、行驶方向、偏移角度等信息实时反映出来,使道路的交通状况得到实时反馈。系统还支持包括车辆车牌型号识别、车道位置、车速等在内的交通数据的实时采集和分析,可实时监控和预警交通拥堵、意外等交通事件。见后页图4。

图4 目标车辆实时信息在数字孪生场景的映射示例图
4.3 事故监测
系统实时监测到高速公路上的交通事故,包括车辆碰撞、车辆倾翻、道路封闭等情况。系统通过对视频流和传感器数据的实时监测和分析,能够自动识别并报警异常事件,及时通知相关管理人员和救援机构。同时,系统还能提供交通事故的位置、时间、车辆类型、事故原因等详细信息,帮助管理人员快速定位事故现场,进行救援和疏导。见图5。

图5 事故信息在数字孪生场景的还原示例图
4.4 风险预警
系统实现对高速公路运行风险的预警,从交通设施安全风险和驾驶行为安全风险两个方面进行。对于交通设施安全风险,系统主要关注道路基础设施、交通管理设施、交通安全设施设备的完好率和布设完整度,采用定期评估的方式进行监测和评估。对于行车行为的安全隐患,该系统利用雷达和视频集成技术,根据车辆的空间位置、车速、行驶方向等,提取车辆行驶轨迹,判断发生碰撞的可能性,并对车辆进行预警,从而减少交通事故的发生。
5 结语
基于雷达和视频的高速公路数字孪生系统采用数据驱动的方式构建高速公路运行场景,通过高速公路要素与数字孪生的虚实映射和交互融合,深度提升高速公路精准感知和风险预警的技术应用水平,对于解决高速公路运营安全管理问题有着重要的作用。未来将进一步开发数字孪生技术在预期事件中交通流的影响评估分析能力,以提升高速公路组织管理水平。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
光学精密工程(2016年3期)2016-11-07 09:03:34
中国交通信息化(2016年9期)2016-06-06 07:42:10
测绘科学与工程(2016年6期)2016-04-17 06:51:25
火控雷达技术(2016年3期)2016-02-06 02:30:26
山东冶金(2015年5期)2015-12-10 03:27:41
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
小说月刊(2014年4期)2014-04-23 08:52:20