基于改进鲸鱼优化算法的自抗扰控制器在硼酸浓度稀释控制中的应用
2024-01-08 08:02鲍克勤王国平
上海电力大学学报 2023年6期
鲍克勤, 汤 豪, 王国平
(上海电力大学 自动化工程学院, 上海 200090)
在核电厂核功率调节中,控制棒的改变会引起轴向功率偏移,超出运行区域而导致核反应堆停堆。硼酸浓度调节能均匀地改变堆芯反应性,不会导致轴向功率的变化,实现更安全、更稳定的核反应堆功率控制[1]。然而,由于硼酸浓度存在大惯性、大时滞的特性,无法实现核反应堆较好的功率跟踪,所以有必要对控制器进行有效改进。当前,一般使用比例-积分(PI)控制器控制核电厂一回路冷却剂硼酸浓度[2],然而当系统存在非线性效应或外界扰动较强时,其控制性能会下降。目前在工业现场中,智能控制得到广泛应用。通过采用模糊控制[3]调整压水堆的硼酸浓度,可以获得较好的负荷跟踪性能和调节效果,但是由于需要建立准确的模型,因此在实际应用中仍然存在一定的困难。滑模控制器[4]独立于系统模型,且仅受滑模面参数影响,但传统滑模控制器不能克服系统未建模动态和外部干扰。为了克服其他控制器的不足,韩京清[5]提出自抗扰控制器,将不受被控对象的精确数学模型的限制,可以实时估算系统内部的不稳定性和外界的影响。李杰等人[6]指出人工智能算法能够得到更准确高效的参数,在参数整定与优化的各个阶段都发挥着关键作用。另外,学者们提出了粒子群优化算法[7]、遗传算法[8]、改进模拟退火算法[9]、非洲秃鹫优化算法[10]、禁忌搜索算法[11]等。与其他算法相比,鲸鱼优化算法[12]的优点在于算法机制简单、全局搜索能力强、调节参数少,然而其收敛速度还有待提高。
针对核电厂一回路硼酸浓度存在大惯性、大时滞的问题,本文提出自抗扰控制器用于硼酸浓度稀释控制。首先,对鲸鱼优化算法的收敛因子进行改进;随后,利用改进算法对自抗扰控制器关键参数寻优,找到最佳适应度;最后,进行了阶跃响应仿真实验。仿真实验结果表明,本方法在调节硼酸浓度稀释时快速性、稳定性更佳,能够较好地实现核反应堆功率跟踪,具有一定的实际意义与研究价值。
1 核电硼酸浓度稀释控制系统模型建立
硼酸稀释阀阀门和堆芯冷却剂平均温度的动态特性数学模型为一阶惯性时滞系统。其传递函数为
(1)
式中:G(s)——传递函数;k——比例系数;Ti——惯性时间常数;s——拉式算子;τ——迟滞时间。
在时滞系统控制中,提高其阶次是一种常用的方法。为了便于时滞系统的设计与分析,在设计自抗扰控制器时,在工程上e-τs通常近似成一阶惯性环节。接下来,把时滞算子近似成一阶惯性环节提高阶次。将自抗扰控制器的设计思想应用于时滞系统,能够实现良好的控制效果。
由泰勒级数,将时滞环节1/eτs中的eτs展开为
(2)
取eτs=1+τs,则e-τs等效为惯性环节1/(τs+1),得到的传递函数为
(3)
将式(3)等效成微分方程,为
(4)
将采样时间设定为1 s,并将微分方程离散化,用差分方程形式表示为
(5)
接着,选择状态变量x1(k)=y(k),x2(k)=y(k+1),将式(5)等效成状态空间方程形式为
(6)
其中,
(7)
式中:A——系统矩阵;B——控制矩阵;C——输出矩阵。
2 核电硼酸浓度稀释控制系统自抗扰控制器设计
针对核电厂一回路冷却剂硼酸浓度惯性时滞的特点,设计核电硼酸浓度自抗扰控制器进行控制。
核电硼酸浓度自抗扰控制器[13]由跟踪微分器、扩张状态观测器、非线性状态误差反馈控制率等部分组成。其结构如图1所示。其中,v为一回路冷却剂平均温度设定值,v1为v的跟踪信号,v2为v的微分信号,z1、z2、z3为扩张状态观测器的输出信号,y为被控对象的输出,e1、e2为差值信号,b为常数,u0为非线性状态误差反馈控制率计算控制量,ω0为被控对象内部扰动,ω为被控对象外部扰动。
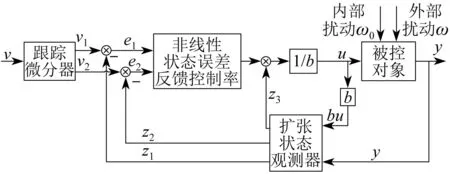
图1 自抗扰控制器结构
跟踪微分器的算法表达式为
(8)
式中:e0(k) ——第k个采样时刻v1和v的差值信号;
v(k)——第k个时刻的输入信号;
v1(k)——第k个采样时刻输入信号v的跟踪信号;
T——采样时间;
v2(k)——第k个采样时刻输入信号v的微分信号;
fst(e0,v2,r,h0)——非线性函数;
r——速度因子;
h0——滤波因子。
fst(e0,v2,r,h0)的表达式为
(9)
式中:a——非线性函数;d——速度因子和滤波因子的乘积。
a的表达式为
(10)
其中,
d=rh0
(11)
(12)
扩张状态观测器的算法表达式为
(13)
式中:x——差值信号;β1、β2、β3、a1、a2、c1、c2、b——系统常数;fal——非线性函数。
非线性函数fal(x,a,c)表达式为
(14)
非线性状态误差反馈控制律的算法表达式为
(15)
式中:e1(k)、e2(k) ——第k个采样时刻差值信号;
δ1、δ2——比例系数;
a3、a4、c3、c4——系统常数;
u0(k) ——第k个采样时刻非线性状态误差反馈的输出信号。
3 改进鲸鱼优化算法对控制器参数整定
根据上文中的自抗扰公式可以看出,自抗扰控制需要设定的参数包括跟踪微分器的{T,r,h0},扩张状态观测器的{a1,a2,b,c1,c2,β1,β2,β3}以及非线性状态误差反馈控制率的{a3,a4,c3,c4,δ1,δ2}。其中一些参数的微小改变都能够对控制效果产生巨大影响。本文选取自抗扰控制器的初始参数为[14]:T=1,r=200,h0=0.5,a1=0.5,a2=0.25,a3=0.75,a4=1.05,c1=c2=0.000 1,c3=c4=0.3,而{β1,β2,β3,δ1,δ2,b}则采用鲸鱼优化算法进行参数整定。
3.1 公式推导与优化求解
根据自抗扰控制公式,推导出设定值与实际值的差值e(k)为
e(k)=v1(k)-y(k)=v1(k-1)+
(16)
n阶离散系统的差分方程为
(17)
式中:di——输出信号序列系数;bi——输入信号序列系数。
结合自抗扰控制的公式与n阶离散系统的差分方程,推导得出:
(18)
通过公式推导可知,自抗扰控制的可调参数十分繁杂,在参数整定时存在一定困难。本文所采用的参数整定方法结合了工程经验整定法和智能整定算法,采用时间乘以绝对误差积分准则EITA为目标函数,以核电厂一回路冷却剂平均温度设定值与平均温度实际值偏差的绝对值乘以时间,再对时间进行积分得到积分值为
(19)
将式(18)代入式(19)中,即可获得最终所需的目标函数,从而可以更直观地看到δ1、δ2、β1、β2、β3、b等参数对目标函数的影响。为了使时长足够,步数最终值m取3 000。在使用改进鲸鱼优化算法寻优时,约束条件为δ1∈(1,300),δ2∈(1,300),β1∈(1,300),β2∈(1,300),β3∈(1,300),b∈(0,1)。
3.2 基于改进鲸鱼优化算法求解
鲸鱼优化算法是通过模拟鲸鱼的捕食活动衍生出的算法,包括摇摆包围捕食、汽泡网捕食、随机搜索猎物3个阶段。鲸鱼通过3个阶段逐渐获取最优解的位置信息,并持续向适应度更高的个体移动,最终达到优化目的,得到最优解。改进鲸鱼优化算法是在鲸鱼优化算法的基础上,将迭代时的收敛因子改进为
(20)
式中:tmax——最大迭代次数;t——迭代次数。
在包围捕食阶段,鲸鱼向猎物移动过程的数学模型为
(21)
式中:D——鲸鱼个体与猎物间的距离向量;E、F——系数向量;X(t)——第t次迭代时鲸鱼的位置向量;X*(t)——第t次迭代时目前的最佳解的位置向量。
其中,
(22)
式中:r1、r2——[0,1]之间的随机向量。
在汽泡网捕食阶段,鲸鱼首先计算出自身与猎物(此刻最佳位置)间的距离。然后通过螺旋式运动,吐出不同大小的气泡攻击猎物。其运动阶段的数学模型为
(23)
式中:D*——第i只鲸鱼位置与最优个体位置之间的距离;
b——限定旋转形状参数,常数;
l——[-1,1]之间的随机向量。
鲸鱼在觅食过程中有摇摆包围捕食和螺旋式运动吐气泡捕食2个机制。假定所有鲸鱼以50%概率同时实施这两种捕食方法,即使用式(21)或式(23)更新自身方位的概率都是50%,其模型为
(24)
式中:p——[0,1]之间的随机数。
在随机搜寻猎物阶段,鲸鱼根据|A|的大小确定处于寻找捕食阶段或是包围捕食阶段。当该数值大于1时,鲸鱼不能获得猎物的有效信息,因此使用随机更新方法持续搜索最优解位置。寻找最优解的数学模型表达式为
(25)
式中:Xrand——从当前群体中随机选取鲸鱼的位置向量。
算法流程如图2所示。
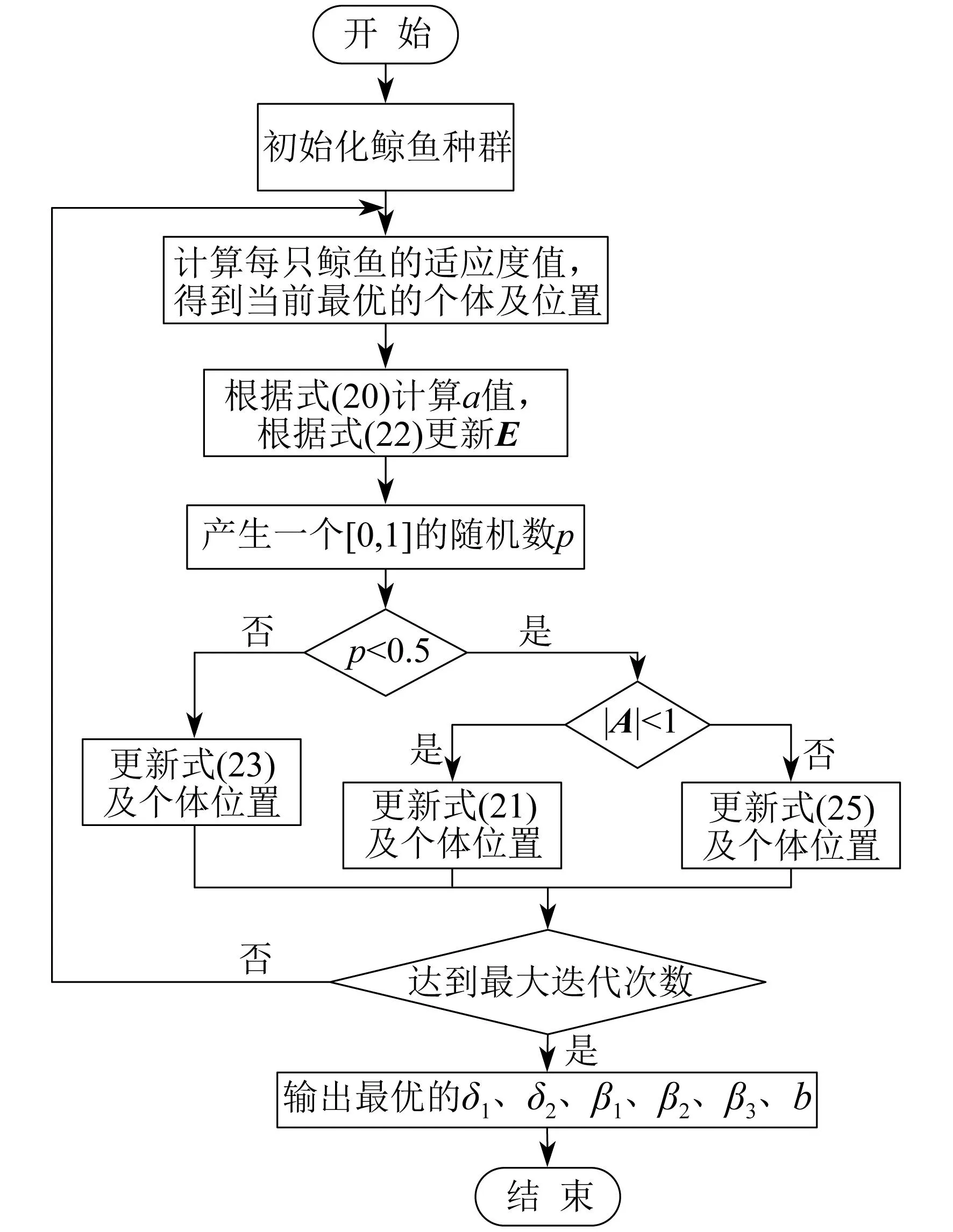
图2 改进鲸鱼优化算法流程
通过改进鲸鱼优化算法,达到最大迭代次数后完成寻优,输出δ1、δ2、β1、β2、β3、b最优值。
4 核电硼酸浓度稀释控制系统仿真分析
4.1 模型建立
本文仿真数据来源于某核电仿真机,在80%负荷和90%负荷下,建立硼酸稀释阀阀门和堆芯冷却剂平均温度间的状态空间模型。模型参数如表1所示。

表1 不同工况下硼酸稀释阀阀门和堆芯冷却剂平均温度间的状态空间模型参数
以90%负荷为例,由式(17)中n阶离散系统的差分方程,计算得出参数d1、d2、b1、b2的值为
(26)
4.2 算法比较


图3 两种算法迭代收敛情况
由图3可知,鲸鱼优化算法在第22次迭代时适应度达到最优值,改进鲸鱼优化算法在第14次迭代时适应度达到最优值,改进鲸鱼优化算法寻优效果更佳。
4.3 仿真验证
在80%和90%负荷工况下,采用3种控制器对核电硼酸浓度稀释控制系统进行仿真实验。参数优化结果如表2所示。其中,Kp为PI控制器中的比例系数,Ki为PI控制器中的积分系数。
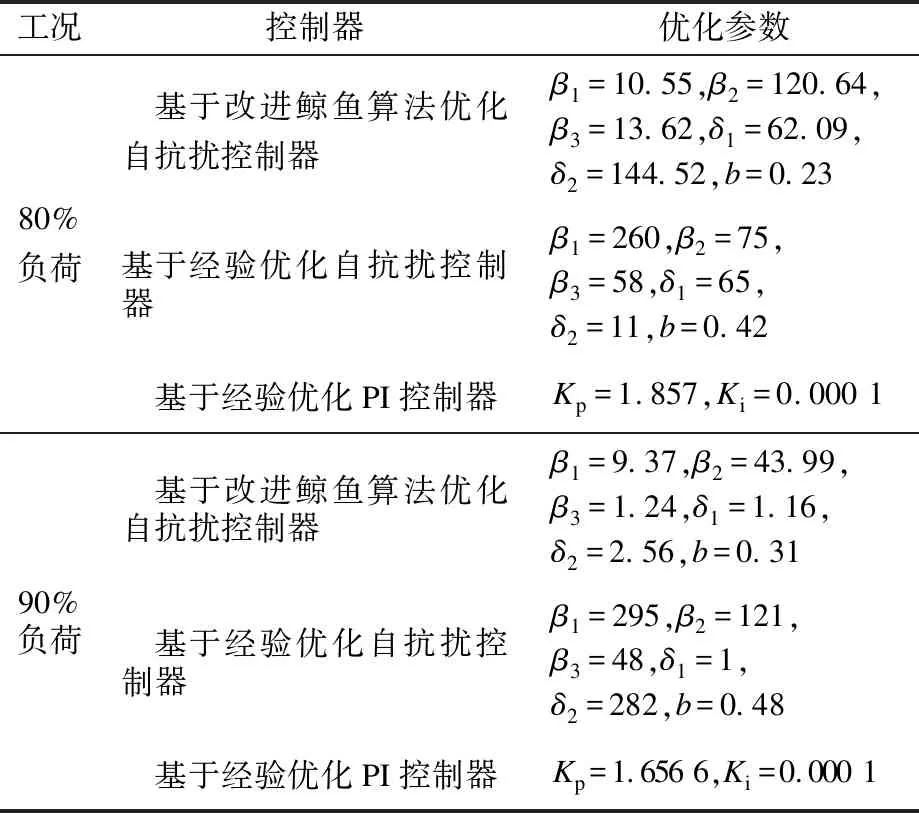
表2 两种工况下参数优化结果
针对硼酸浓度稀释控制系统,采用3种不同控制器进行仿真实验的时域性能指标见表3。
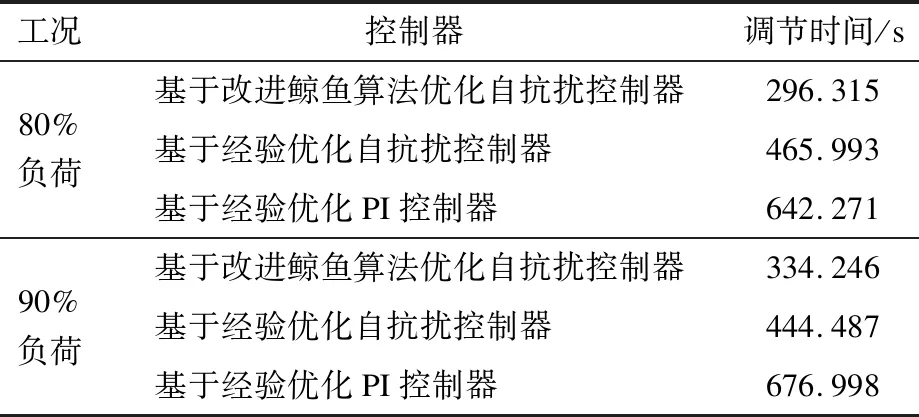
表3 时域性能指标
两种工况下,核电硼酸浓度稀释控制系统阶跃响应仿真曲线如图4所示。

图4 核电硼酸浓度稀释控制系统阶跃响应仿真曲线
由表3和图4可知,在80%负荷工况下,基于改进鲸鱼优化算法自抗扰控制器对于核电硼酸浓度稀释控制系统的调节时间为296.315 s,较基于经验优化自抗扰控制器缩短了36.27%,较基于经验优化PI控制器缩短了54.00%。在90%负荷工况下,基于改进鲸鱼优化算法的自抗扰控制器对于核电硼酸浓度稀释控制系统的调节时间为334.246 s,较基于经验优化自抗扰控制器缩短了24.80%,较基于经验优化PI控制器缩短了50.63%。
4 结 语
针对传统控制器对核电厂一回路硼酸浓度控制系统由大惯性、大时滞造成控制效果不佳的问题,本文提出了基于改进鲸鱼优化算法自抗扰控制器,得到如下结论。与基于经验整定参数的PI控制器相比,基于经验优化自抗扰控制器能够更好地完成核电一回路硼酸浓度稀释的快速稳定调节,较好地实现了核反应堆功率跟踪,具有更有效的调节效果和更好的动态特性。改进了鲸鱼优化算法的收敛因子后,该算法具有更好的收敛速度、更佳的寻优效果。利用改进鲸鱼优化算法进行参数整定的自抗扰控制器在调节核电厂一回路硼酸浓度的稀释时,其效果优于基于经验整定参数的自抗扰控制器。
猜你喜欢
幼儿100(2022年41期)2022-11-24
数学物理学报(2020年5期)2020-11-26
数学大王·趣味逻辑(2020年9期)2020-09-06
小天使·二年级语数英综合(2019年4期)2019-10-06
设备管理与维修(2019年9期)2019-09-12
动漫星空(2018年4期)2018-10-26
大连工业大学学报(2015年4期)2015-12-11
中国塑料(2015年7期)2015-10-14
四川师范大学学报(自然科学版)(2015年2期)2015-02-28
应用数学与计算数学学报(2014年3期)2014-09-26