电动伺服机构扰动补偿与神经网络模糊控制
2024-01-06 01:07胡涛申立群曹杰铭董伟锋宁佳意
电机与控制学报 2023年11期
胡涛, 申立群, 曹杰铭, 董伟锋, 宁佳意
(哈尔滨工业大学 仪器科学与工程学院,黑龙江 哈尔滨 150001)
0 引 言
航天飞行器在运行过程中为了沿着预定轨道飞行,航天伺服机构需要接收制导系统的控制指令,通过闭环回路产生控制力矩,实时调整自身姿态[1]。航天飞行器通常通过推力矢量控制(thrust vector control,TVC)修正姿态,即通过伺服机构的作动器旋转发动机尾部喷管,改变喷管在偏航轴或俯仰轴的摆角,产生横向力和绕质心运动的控制力矩,来修正航天飞行器的运行轨迹和姿态[2]。
伺服机构在TVC系统发挥着控制姿态和方向变化的重要作用。早期为了保证可靠性,大多使用电动液压伺服机构,但由于电动液压执行器需要的大量精细零件以及较高清洁度等要求,其设计问题一直是航空航天领域的巨大挑战[3-5]。随着航空航天工业的发展,对为了获得更高的航空品质和驱动性能,航空航天行业越来越多地采用电动伺服系统来取代传统的电动液压伺服系统[6-7]。如今电动伺服系统因为具有结构简单、质量更轻、成本较低、控制稳定性高等优点,已成为TVC系统执行器主要研究趋势。例如:熟知的Vega运载火箭的第二、三、四级TVC系统便采用的机电作动器[8]。
模糊控制是智能控制理论的重要组成部分[9-11],它不需要被控对象的精确数学模型,对于非线性高的被控对象有较好的控制效果,广泛应用于工程机械和航空航天领域。文献[12]将模糊控制理论和PID控制方法相结合,提出了适合伺服系统的模糊自整定PID控制算法,对缩短伺服系统的输出响应时间及提高扰动稳定性都具有明显的优势,具有良好的工程应用前景。文献[13]针对传统PID控制器参数时变导致控制品质下降的问题,基于模糊控制原理设计了一种角度随动系统的自适应模糊PID控制器,加快了系统的收敛速度,减少了超调量。文献[14]通过引入前馈补偿和模糊PID控制器,完成了舵机加载系统的设计和实现,系统输出跟随输入能力增强,滞后减小。文献[15]利用变论域的模糊控制方法,改进了运载火箭姿态的控制设计,对外部干扰具有良好的鲁棒性,提高了控制精确度。因此,模糊控制对于具有惯性大、时变不确定性、非线性等特点的航天电动伺服系统具有良好的控制效果,在液压、舵机伺服系统上获得了较为成熟的应用[16-19]。但这些研究并没有考虑分析伺服系统所受到的摩擦力矩、齿槽力矩扰动等非线性扰动因素,同时模糊规则的建立,很大程度上取决于人的主观经验,因此模糊控制的自适应性和自学习能力需要进一步提升。
本文以直驱式机电作动器的电动伺服机构为研究对象,并充分考虑了摩擦、电机齿槽力矩、时滞等内部非线性干扰对TVC系统造成的影响。对电动伺服机构和各扰动因素进行动力学分析,建立数学模型,并通过Simulink软件搭建出仿真模型。 通过设计前馈控制器对非线性干扰进行补偿,设计的模糊PID控制器提高了系统的响应速度。在模糊PID控制器的基础上,引入BP神经网络保证模糊控制在全输入论域上都有良好的控制效果。同时改善电动伺服机构的动、静态特性,使其达到TVC系统的指标要求,可以为航天电动伺服机构结构和控制器设计提供借鉴。
1 航天电动伺服系统模型搭建
电动伺服系统由电源、控制器、机电作动器(electromechanical actuation,EMA)组成,直驱式机电作动器不含减速箱,可以直接将电机的旋转运动转化为螺母的直线往复运动,从而驱动活塞摆动喷管。同时也有利于在滚柱丝杠的螺杆中插入用于测量活塞位移的线性传感器 (linear variable differential transformer,LVDT),保护LVDT免受外部冲击,TVC系统结构如图1所示。

图1 TVC系统结构图
直驱式机电作动器结构简单、成本更低、故障发生的概率降低、可靠性更高。因此本文对直驱式电动伺服系统进行仿真建模,考虑系统非线性干扰,设计控制器改善电动伺服机构的动、静态特性。
1.1 TVC系统标称模型
机电作动器的驱动电机使用低速高扭矩的永磁同步电机(permanent magnet synchronous motor,PMSM),其转矩方程为
(1)
式中:TL为负载转矩;Jm为转子转动惯量;Bm为电机阻尼系数;Te为电磁力矩;ωe为机械角速度。
永磁同步电机驱动力矩通过丝杠传递到活塞,力矩与丝杠的轴向载荷之间的关系为
(2)
式中:Te为PMSM电机传递到丝杠旋转轴的扭矩;F为轴向载荷;p为丝杠导程;η为丝杠传递效率。
直驱式机电执行器没有减速器,丝杠的螺杆中有检测活塞位移的LVDT,EMA中电机的负载力矩为
(3)
式中:mp为活塞质量;Bp为丝杠粘滞阻尼系数;xp为执行器的行程,由滚柱丝杠导程和电机旋转角度决定,即
(4)
将式(4)代入式(3)中得到机电执行器负载转矩TL与电机旋转角度的表达式为
(5)
由于喷管的转动惯量是机电执行器的主要负载,喷管的负载转矩TE可以由下式计算得到:
TE=RmFE。
(6)
式中:Rm为执行器力臂;FE为喷管负载产生的阻力,有
FE=keq(xp-xeq)。
(7)
式中xeq是等效刚体模型中作动器活塞的位移,将PMSM电机的负载转矩方程由式(5)改为
(8)
1.2 TVC系统非线性模型
1)摩擦力矩扰动。
摩擦力矩是系统低速和微位移运行时的主要干扰力矩,导致系统产生“爬行”和“死区”等现象,产生功率损耗、仪器设备损坏等不良影响, 并降低系统动、静态性能。工程中,Stirbeck模型能够较好地描述摩擦力与速度的关系,Stribeck模型[20]如下:
(9)
式中:库仑摩擦力矩Fc=0.25 N·m、静摩擦力矩Fs=0.5 N·m、粘性摩擦力矩系数Bv=0.5 N·m·s/rad、vs为Stribeck速度,vs和ξ为经验参数。
2)齿槽力矩扰动。
齿槽转矩扰动是由磁场在电机齿槽两侧分布不均匀导致的。本文采用的是16级48槽永磁同步电机,未采用转子斜极法安装时齿槽转矩的峰峰值为0.44 N·m转矩大小随转子角度呈正弦波动,波动周期为7.5°,呈现为3P次谐波干扰。齿槽力矩扰动的数学模型如下:
Fcog=0.44sin(48θ)。
(10)
式中:θ为电机的电磁角度;Fcog为电机齿槽转矩。
3)时滞特性。
推力矢量控制系统是典型的数字、模拟信号混合控制系统,矢量控制器和机电作动器必然会引入时滞特性。时滞环节的存在,会降低系统的跟随性能。通过工程的实际测量,由上述因素造成的系统时滞大小一般在4~6 ms之间。时滞环节的传函为
Gτ(s)=e-τs。
(11)
其中时间常数τ为6 ms。
通过以上对TVC系统模型的建立以及考虑的各种非线性扰动因素,利用Simulink仿真实现,建立各扰动仿真模型,引入了非线性扰动的TVC系统仿真模型如图2所示。

图2 含非线性环节的完整TVC仿真模型
1.3 系统性能指标及参数取值
本文以直驱式机电伺服系统为研究对象,建立了TVC系统非线性模型。模型中永磁同步电机、滚柱丝杠、活塞和负载等组件的模型参数如表1所示,电动伺服系统的动态性能指标要求如表2所示。
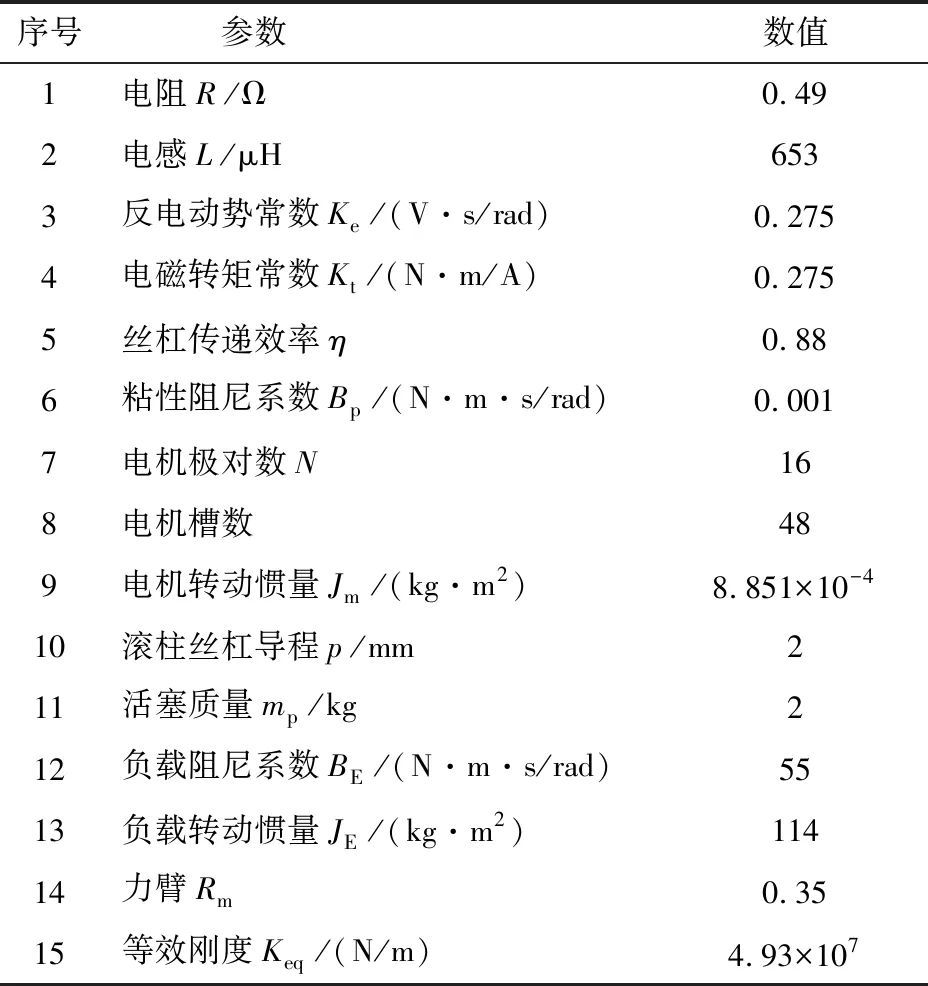
表1 TVC系统标称模型参数
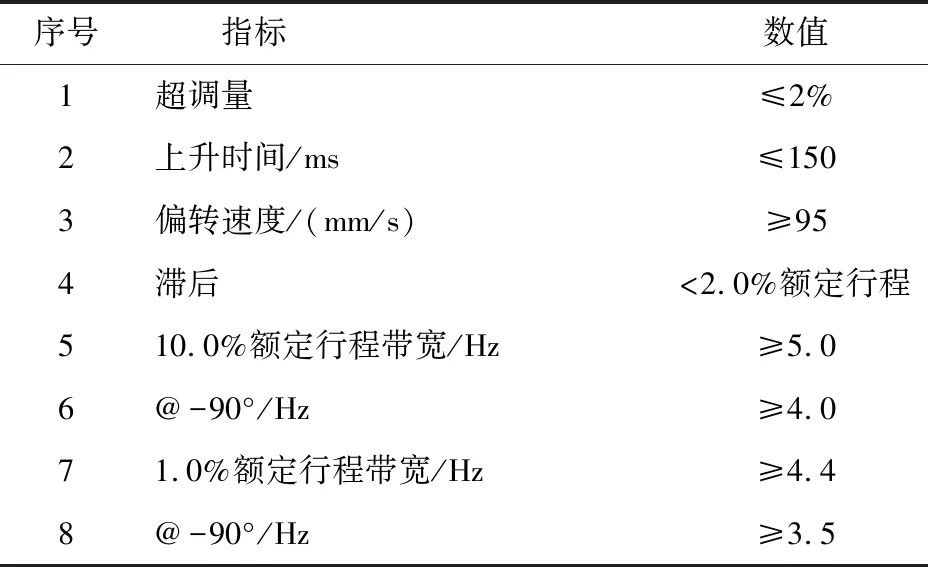
表2 TVC系统动态性能指标
2 扰动补偿控制器设计
1)摩擦力矩补偿。
前馈系统如图3所示,为了研究在微位移、低速情况下摩擦力矩对整个TVC系统的影响,对位置环输入幅值为1 V(10%行程)的阶跃控制信号,得到如图4(a)所示的阶跃响应曲线。可以看出,当系统趋近稳定值即2.043 mm时,转速在0附近跳变,摩擦力在正负最大摩擦力之间跳变,导致输出在稳定值之间来回振荡。

图3 按扰动补偿的前馈控制

图4 摩擦力矩补偿前后的阶跃响应曲线
本文采用图3所示的方式设计前馈控制器,将干扰信号通过校正原件处理后,利用一条单独的通路引入控制系统补偿扰动信号。其中:N(s)为可测量到的扰动,例如摩擦力矩干扰;G1(s)、G2(s)是包括反馈控制器的主控制回路前向通道的传递函数;G3(s)为前馈补偿原件的传递函数。当前馈补偿元件传函为下式时:
(12)
理论情况下由干扰造成的误差为0,E(s)=0,前馈补偿完全补偿干扰力矩所产生的不良影响。
为了得到主控制回路传函G1(s),对TVC系统输入10 V满行程控制指令信号,并以转速环控制信号作为输入,干扰力矩输入点作为输出,将输入输出数据导入到MATLAB工作区间,通过系统分析工具拟合得到传函G1(s)。传函G3(s)的具体形式如下:
(13)
取摩擦力矩补偿后TVC系统的位置环,在零时刻输入幅值为1 V(10%行程)的阶跃控制信号,TVC系统阶跃响应曲线如图4(b)所示。与图4(a)相比,加入前馈补偿虽然使系统上升时间略有增加,但仍能满足动态特性要求,同时减少了超调量和稳态误差,改善了稳态值附近摩擦力矩正负波动而导致的振荡现象,提高了系统的动态性能和抗干扰能力。
2)齿槽力矩补偿。
为了研究在微位移、低速情况下齿槽定位力矩对TVC系统的影响,在零时刻对系统位置环输入幅值为0.1 V的1%行程位移阶跃信号,仿真时间为3 s,仿真曲线如图5(a)所示。可以看出,在0~0.06 s的时间内电机电磁转矩较大,电机快速起步,齿槽转矩对电机转速和系统位移影响较小;0.06~2.2 s之间PID控制器对误差信号的积分作用使得电磁转矩足以克服齿槽转矩的大小。但积分作用的滞后效果,让系统存在3.3%的超调,在3 s时仍存在3%的稳态误差,不满足静态性能指标。由此可见在微位移、低转速的情况下齿槽转矩会阻碍系统达到稳态值,大大增加了系统的调节时间,降低了系统的动态响应能力。
前馈补偿后TVC系统1%行程阶跃响应曲线如图5(b)所示。与图5(a)相比,前馈控制较好的补偿了齿槽力矩干扰,解决了齿槽力矩在稳态值附近带来的延时,使调节时间几乎为0,同时减少了超调量和稳态误差,极大改善了系统的动态性能。
3 双闭环控制器设计
3.1 转速环PID控制器设计
本文将经验推理和临界比例度法结合使用,通过经验推理法得到PID参数初始值,再通过临界比例度法的公式进一步调节,以此对TVC系统的转速环控制器参数进行设计。通过多次仿真实验并微调后得到转速环PID控制器的3个参数分别为:kp=5、ki=0.1、kd=0.1。本文所选用的永磁同步电机最大空载转速为4 500 r/min,转化弧度值为471 rad/s。为了观测转速环的动态性能,在零时刻对无负载的机电执行器输入幅值为471 rad/s的阶跃信号,EMA的转速响应曲线如图6所示。可知电机转速上升时间为42.6 ms,在0.5 s时电机转速达到了469.7 rad/s。转速环没有超调、稳态误差几乎为0,且上升时间快,具有较好的动态特性。
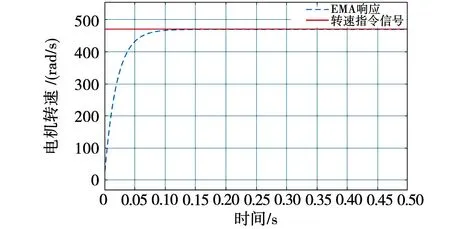
图6 EMA转速环响应曲线
3.2 位置环模糊PID控制器设计
1)模糊变量设计。
位置环模糊PID控制系统的结构图如图7所示。由图可知,位置环的输入信号即位移偏差信号e。本次位置环模糊PID控制器采用二维输入、三维输出的结构,即以位移偏差信号e和位移偏差变化率ec作为输入,PID控制器的kp、ki、kd参数作为3个输出,实现PID控制器参数的动态调整,提高系统的适应性和抗干扰能力。

图7 位置环模糊PID控制系统结构图
根据模糊论域设计方法确定输入、输出变量的模糊论域。各个变量取值情况如下:e论域为[-12,12]、ec的论域为[-12,12]、kp的论域为[10,65]、ki的论域为[2,12.5]、kd的论域为[0.001,0.066]。综合考虑模糊控制的准确度和推理复杂度,将输入输出5个变量划分为7个自然语言描述的子集,即正大(PB)、正中(PM)、正小(PS)、零(ZO)、负小(NS)、负中(NM)、负大(NB)。
2)量化因子及比例因子设计。
量化因子是将实际的位置环输入映射到模糊输入论域上,起到把连续的物理输入量转化到离散模糊子集的变论域效果。
比例因子将模糊输出论域转变到实际输出论域中,起到离散模糊子集到连续物理输出的变论域效果。比例因子越大系统的响应速度越快,但过大会增大超调量和调节时间,严重会导致系统发散。
根据经验微调得到Ke=0.49。同理误差变化率量化因子取相同值Kec=0.49, 各比例因子Kup=1.5、Kui=1.2、Kud=1.2。
3)模糊推理规则设计。
为了保证模糊控制器高灵敏度的同时,也具有较好的稳定性,在输入输出较大时,即模糊子集为正大(PB)和负大(NB),选用高斯形函数,保证在输入输出变化较大时,函数曲线较平缓,降低超调量,提高系统稳定性;在输入输出为中值区时,即模糊子集为正中(PM)到负中(NM)之间,选用三角形函数,确保系统输入值变化较小时,有较高的灵敏度,提高系统的响应速度。
模糊控制器在不同e和ec输入值的情况下,PID控制器参数具体的模糊子集取值如表3所示。
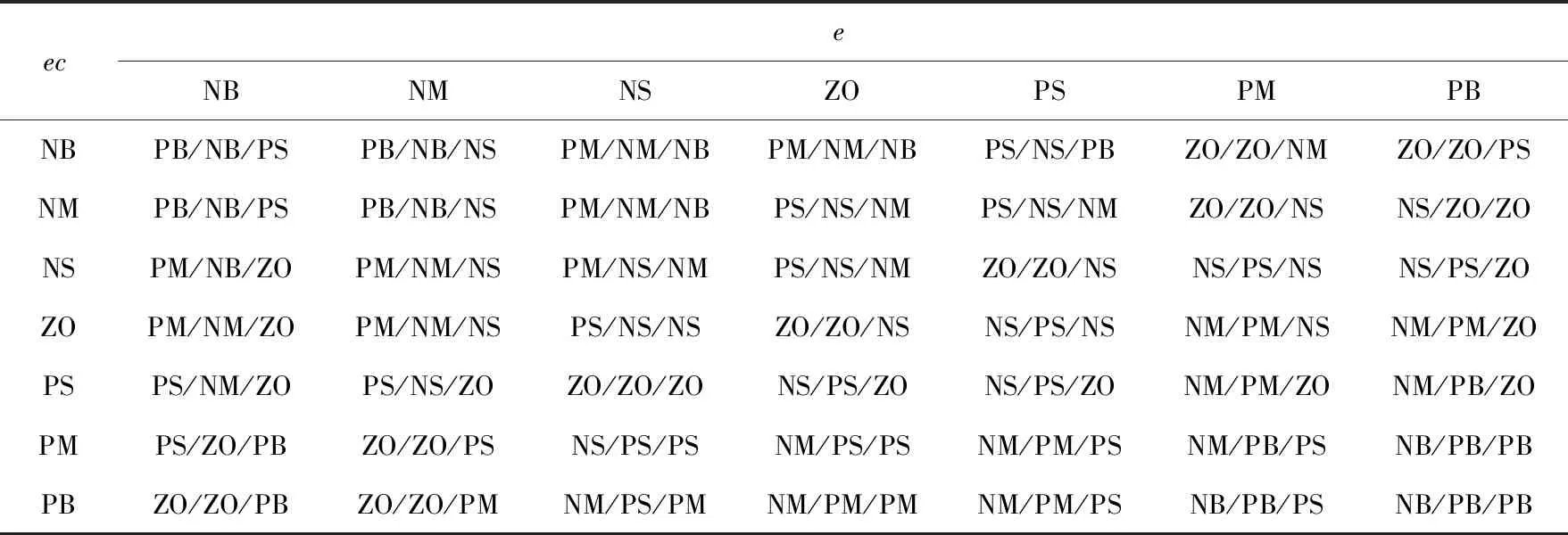
表3 模糊PID控制器kp/ki/kd推理规则表
3.3 模糊神经网络PID控制器设计
模糊PID实现了PID控制器参数的动态调整,提高系统应对复杂情况的能力。但量化因子和比例因子都是固定值,当物理输入值与模糊论域相差较大时会使得模糊化后的输入不能完全映射到模糊论域上,导致控制灵敏度下降。本文利用BP前馈神经网络来动态调整量化、比例因子值,增强系统适应能力。
1)控制器结构设计。
利用BP神经网络较强的拟合能力,利用在不同位移指令下人为整定的量化因子和比例因子样本进行训练,将训练好的BP网络搭建到TVC仿真模型中,实现对模糊控制器参数的动态整定,含有BP神经网络的模糊PID控制系统如图8所示。
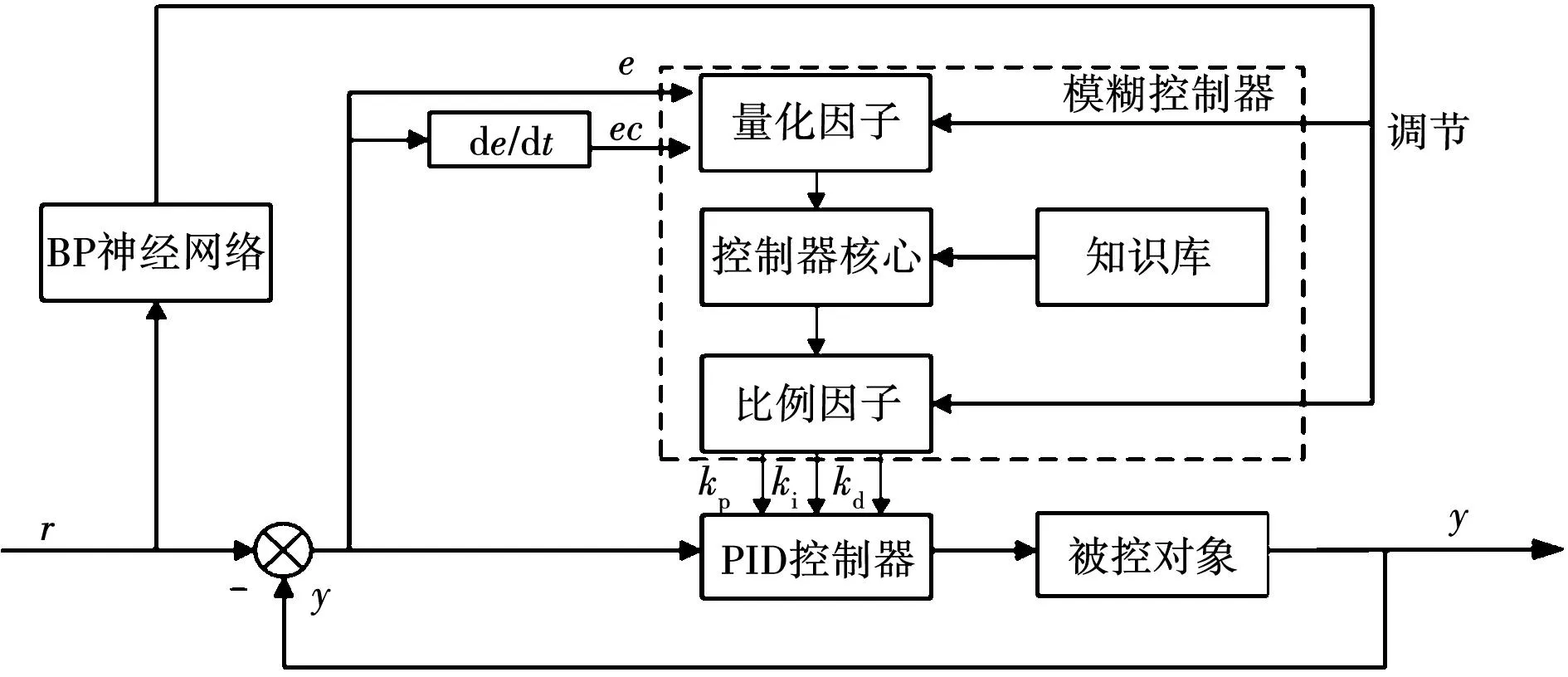
图8 BP神经网络模糊PID控制系统结构图
2)量化因子及比例因子拟合。
BP神经网络的学习样本源于人为整定的数据,在设计的传统模糊PID基础上,通过Simulink仿真,输入不同阶跃位置指令,分析TVC系统性能指标,人为修正量化因子和比例因子值,使系统在完整指令信号域上都有较好的动态性能。
kp比例因子的BP网络设定为三层,第一层输入层有1个输入节点,第二层隐藏层设置10个节点,第三层输出层有1个输出节点,训练样本集占70%,验证集占15%,测试集占15%。3个斜率较大的波峰处,调小步长多次整定,kp的比例因子的训练样本个数为114,它的拟合结果如图9所示。

图9 kp比例因子拟合结果
模糊PID的kp模糊论域为[10,65],并非关于零点中心对称,模糊推理规则决定的kp输出值,也不随输入值线性变化。人为整定kp比例因子发现负向最大位移-20.43 mm处,kp=2.5时系统响应速度快;负向最大位移20.43 mm处,kp=1.5时系统响应速度快,两者下降和上升时间都约为119 ms。指令位移输入为0、-5、5 mm时,比例因子出现峰值,在峰值附近应该减小步长,增加样本个数,提高BP网络复杂度。从图9看出,采用10个隐藏节点的BP网络较好拟合了整定样本,误差较小。
同理,对量化因子及ki、kd比例因子也利用人为整定得样本进行训练。量化因子与ki、kd比例因子拟合曲线都近似正态分布,搭建的BP网络学习能力强,较好拟合了给定样本,拟合曲线误差较小。
4 仿真验证与对比分析
为了对比TVC系统分别在传统PID、模糊PID以及神经网络模糊PID控制器下的控制性能,从动态响应能力、跟随性能、抗干扰能力、频域响应能力以及对微位移的响应速度这5个方面进行仿真验证和对比分析。其中转速环PID控制器的3个参数分别为:kp=5、ki=0.1、kd=0.1,位置环控制器参数由模糊控制器进行动态调整,比例因子和量化因子由训练好的10层BP神经网络进行实时整定。
1)TVC系统的动态响应能力对比实验。
为对比各控制器下TVC系统的动态响应能力,在零时刻、零初始位置分别输入正负向最大行程20.43 mm的阶跃位置指令信号,观察位置环取不同控制器时TVC系统阶跃响应曲线,如图10(a)和图10(b)所示。可以看出,传统PID的控制效果正负向一致,即正向上升时间和负向下降时间都为166.11 ms,超调量为0.3%。模糊PID控制器因模糊规则及模糊输出论域不对称,正负向阶跃响应不完全相同,正向上升时间为118.73 ms,超调量为0.6%;反向下降时间为144.76 ms,超调量为0.7%。模糊PID正负向响应速度皆比传统PID快,存在小于1%的微小超调。模糊BP网络PID的上升时间为117.76 ms,超调量为0.2%;反向下降时间为117.72 ms,超调量为0.1%。
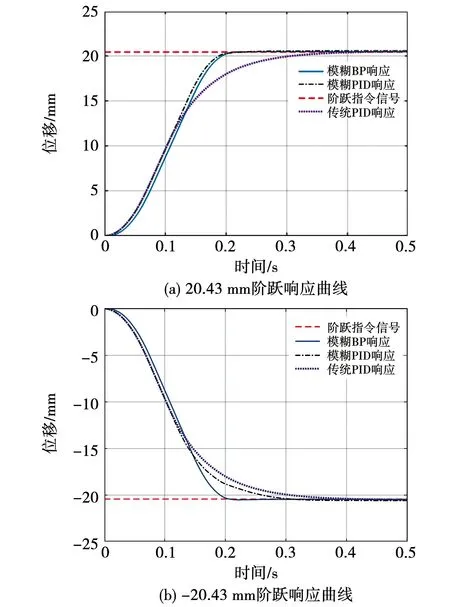
图10 TVC系统的动态响应能力对比实验结果
2)TVC系统的跟随性能对比实验。
为考验TVC系统的跟随性能,在零时刻、零初始位置输入频率为1 Hz,幅度为20.43 mm的正弦指令信号,TVC系统响应曲线如图11所示。仿真结果表明,模糊PID和模糊BP网络神经PID在幅值和跟随时间上皆优于传统PID控制,加快了系统跟随速度,改善了系统的跟随性能。但两者性能相似。
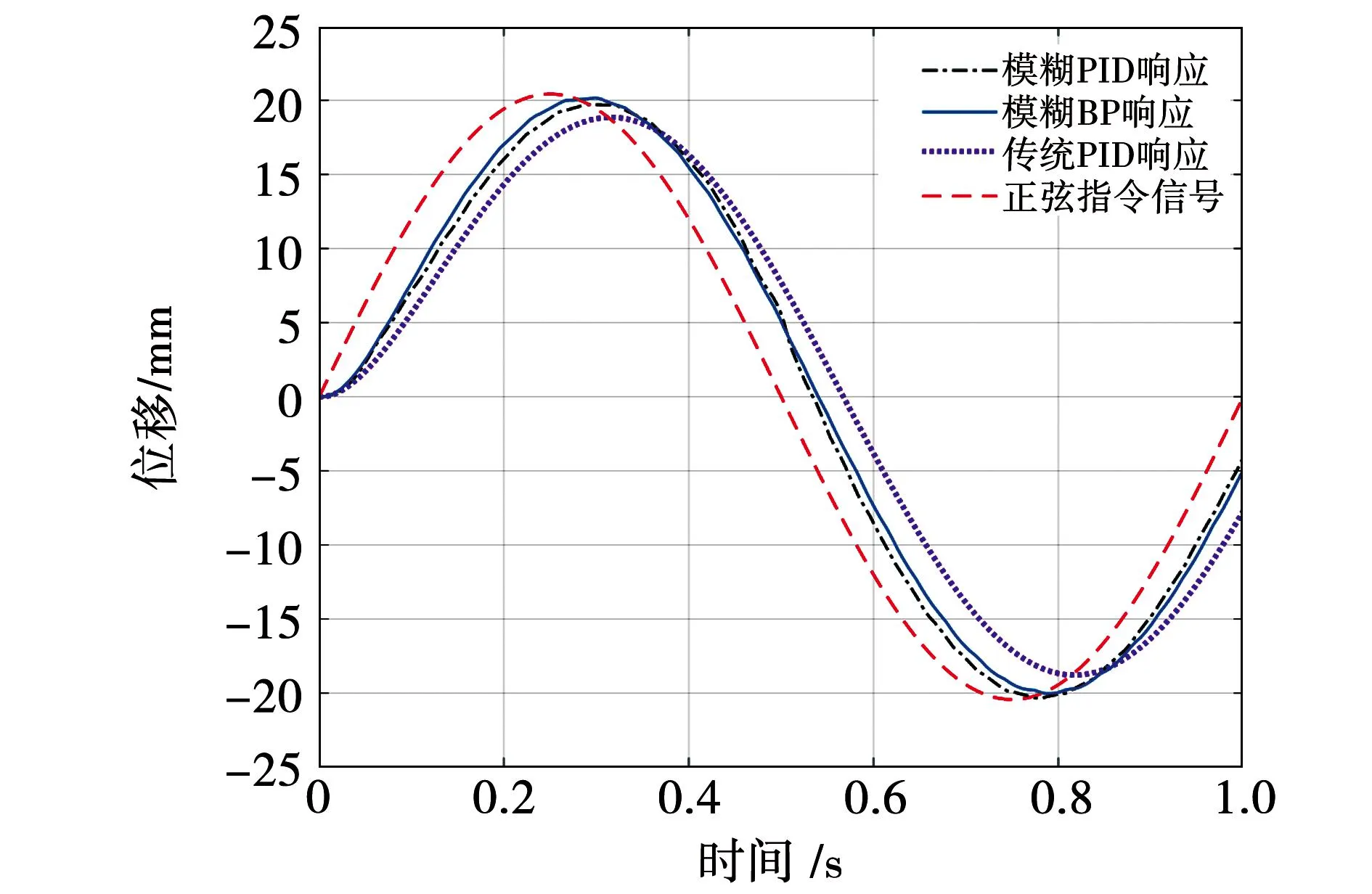
图11 TVC系统的跟随性能对比实验结果
3)TVC系统的抗干扰能力对比实验。
为考验系统的抗干扰能力,在零时刻、零初始位置对不同控制器下TVC系统输入幅值为0.204 3 mm的阶跃位置指令,在系统稳定后,0.5 s时突加幅值为150 N·m,持续时间为0.25 s的阶跃负载扰动,系统响应曲线如图12所示。其中,模糊BP受负载扰动后幅值下降最少,负载消除后恢复时间最短。传统PID控制下的系统幅值下降最大,恢复时间最长,模糊PID控制器居于两者之间。综上所述,模糊BP网络PID控制器抗干扰能力最好,模糊PID居中,传统PID最差。

图12 TVC系统的抗干扰能力对比实验结果
4)TVC系统的频域响应对比实验。
为检验采用模糊控制的TVC系统是否满足频域指标要求,使用典型幅值和频率的正弦信号激励TVC系统。TVC系统工作带宽在10 Hz以内,在零时刻、零初始位置将幅值为1 V即10%行程2.043 mm,频率在0.1~20 Hz的Chirp信号作为激励,得到TVC系统的位移响应曲线和频率响应曲线分别如图13(a)和图13(b)所示。图13(a)表明,随着Chirp信号频率的增加,TVC系统响应幅值逐渐降低,模糊PID控制器正负向不对称,正向响应速度快于负向,正向跟随性能更好,负向幅值较低。模糊BP网络PID根据输入位移幅值动态调整量化、比例因子大小,正负向对称,正向幅值与模糊PID近似,负向幅值高于模糊PID,动态响应更佳。图13(b)中,当位移指令信号幅值为10%行程时,采用模糊PID控制的TVC系统拥有3.13 Hz带宽,相频特性曲线-90°对应频率为8.82 Hz,系统带宽要求仍有所欠缺。采用模糊BP网络PID控制的TVC系统拥有4.25 Hz带宽,相频特性曲线-90°对应频率为9.98 Hz。模糊控制器拓宽了带宽,改善了系统频率特性。BP神经网络在传统模糊控制基础上进一步拓宽了带宽,满足了系统频域指标要求。

图13 TVC系统的频域响应对比实验结果
5)TVC系统对微位移的响应速度对比实验。
液体发动机燃料晃动会使航天飞行器姿态发生轻微晃动,为了保证系统稳定性,航天电动伺服系统需要对微位移控制指令也要有较快的响应速度。在零时刻、零初始位置以幅值为0.1 V即1%行程0.204 3 mm,频率在0.1~20 Hz的Chirp信号作为激励,得到TVC系统的位移响应曲线和频率响应曲线分别如图14(a)和图14(b)所示。图14(a)可以看出,模糊BP网络PID控制0.1%行程的正弦响应明显优于传统模糊控制。在时间为10 s,位置指令为20 Hz时,模糊BP幅值为0.194 3 mm,下降了4.9%,此时传统模糊PID为0.127 2 mm,下降了37.7%。图14(b)中,当位移指令信号幅值为1%行程时,采用模糊PID控制的TVC系统拥有4.25 Hz带宽,相频特性曲线-90°对应频率为10 Hz,系统带宽要求仍有所欠缺。采用模糊BP网络PID控制的系统拥有4.32 Hz带宽,相频特性曲线-90°对应频率为15.2 Hz。相比于传统PID控制器,模糊控制器拓宽了带宽,系统响应速度更快。传统模糊和BP模糊均能满足频率特性要求,但采用BP模糊器的系统带宽更宽,较好改善了系统频率特性。
5 结 论
本文以使用直驱式机电作动器的电动伺服系统为研究对象,对其进行分析建模,并针对系统存在的问题设计控制方法,改善系统性能。对直驱式航天电动伺服系统的各组成环节,及在运行过程中存在的非线性干扰,搭建了Simulink仿真模型。以此非线性TVC系统仿真模型为基础,针对系统存在的问题,通过前馈控制方法补偿了非线性扰动,并设计PID、模糊PID和模糊BP神经网络PID控制器。各控制器的仿真结果表明,模糊BP网络控制器性能最好,传统PID最差,模糊PID居中,模糊神经网络控制器较好的提高了系统响应速度,增强了系统抗干扰能力,满足了系统的动、静态性能和频域性能指标,改善了系统控制品质。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
防爆电机(2022年2期)2022-04-26
微特电机(2021年3期)2021-04-06
成都信息工程大学学报(2021年6期)2021-02-12
测控技术(2018年12期)2018-11-25
测控技术(2018年10期)2018-11-25
广东石油化工学院学报(2016年3期)2016-05-17
电源技术(2016年2期)2016-02-27
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11