基于稀疏重构的铁路货车TFDS 网络传输时延估计
2024-01-05 12:05:50马子钦
电子设计工程 2024年1期
马子钦
(国能铁路装备有限责任公司,北京 100011)
近几年,科学技术水平的提升推进了网络技术的发展,对货车运行故障动态图像检测系统(Trouble of moving Freight car Detection System,TFDS)的操作规范提出了新的要求。为了满足时代发展要求,提高服务水平,铁路货车TFDS 以集群化的方式对多个TFDS 设备在不同地点收集的货车信息进行精确传输。然而,这一过程容易出现时延,因此有必要进行网络传输时延估计,以此提升信息传输效率。文献[1]提出了一种基于自适应滤波的时延估计方法,该方法通过改变自适应滤波算法参数,获取时延估计结果;文献[2]提出了基于压缩感知的时延估计方法,利用海量的特征矢量构建出一个子域,采用子域对其进行滤波处理。通过加权压缩的方法获得了时延估计值。由于相位偏移、频率扩展等因素影响,这两种方法的估计结果的精准度不高,因此提出基于稀疏重构的铁路货车TFDS 网络传输时延估计方法。
1 铁路货车TFDS 网络传输集成信号分析
铁路货车TFDS 利用多个TFDS 装置对所获取的车辆信息进行实时传输[3-4]。通过专用光纤信道,实现了TFDS 检测站与铁路局车辆运行安全检测中心之间的数据传输[5]。TFDS 网络传输图如图1所示。
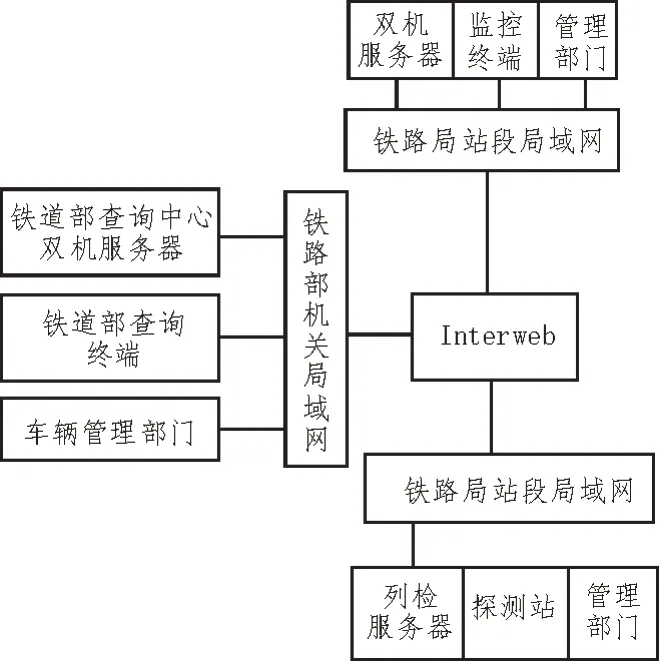
图1 TFDS网络传输图
采用专用1 000M 光纤网络通信,能够保证信息从检测站到列检测试中心过程中的传输格式和信道条件满足铁路总公司的相关要求[6-7]。相关的作业信号为:
式中,φr表示作业路径衰减;τ表示时延;ζ(n)表示噪声信号;x(n) 表示稀疏重构信号[8]。对该公式信号做快速傅里叶变换,获取信号频谱,由此得到的待估计时延参数存在于频谱的相位信息中,根据时频域对偶关系确定铁路货车TFDS 网络传输集成信号。
2 基于稀疏重构的时延估计
2.1 信号预处理
采用稀疏重构技术进行时延估计的过程中,以信号稀疏表达为先决条件,采用测量矩阵以及信号重建算法相结合的方法实现时延估计准确估计[9-10]。选取适当的稀疏表示矩阵,即可将信号表示成稀疏格式[11]。均等份划分信号时域,将信号时域划分成m等份。假设在任意一个等分时域中,信号增益稀疏向量可表示为:
式中,[r0,r1,…,rm] 表示稀疏向量;i表示划分次数;c表示载波频率;υm表示时域划分结果。每个稀疏矢量都对应一条划分路径[12]。为了反映信号在时间范围内的稀疏性,为此将增益稀疏矢量视为信号增益稀疏,由此完成信号预处理[13]。
2.2 时延原子稀疏重构
对铁路货车TFDS 网络传输信号进行重构时,选取最适合于信号的测量矩阵,利用稀疏重构方法进行稀疏近似,并求取裕度。在迭代之后,用选定的时延原子对该信号进行线性表示[14]。然而,该方法仅选取具有最大信号投射量的原子作为时延原子。在稀疏性不等于1 的情况下,经常同时出现多个具有相同投影值的原子,从而提升次优原子的选取质量[15]。首先,按最大到最小的投射值进行排序,选取最好的原子为第一个选定的原子。其次,利用回溯机制对所选择的原子进行最小二乘近似,并对其进行分类。稀疏重构时延原子重构步骤为:初始化信号,令迭代次数为1,索引集合为非空集。通过在测量矩阵中选取与信号最匹配的原子,其在空间上投影最大值为:
式中,E0j表示测量矩阵的第j个原子。对该数值进行排序,获取索引集合。更新索引集,得到测量矩阵中的原子集合,并对其依次排序[16]。经过多次迭代处理后,使由多个元素构成的原子集合包含了所有近似于作业信号的集合,那么投影值中元素所对应的支撑就是最优原子。
2.3 时延估计
对于铁路货车TFDS 网络传输时延估计,需要估计基站到传输终端的时延值。根据重构后的时延原子,引入正交匹配追踪算法[17-19],遵循稀疏字典与传输信号相关性最大的原则,经过迭代处理后计算投影系数,更新迭代参数,由此得到时延估计结果,步骤如下:
步骤1:假设基站数量为1,作业信号即为输出信号。当基站数量为2时,经过稀疏重构得到的信号为:
式中,yp(n)表示多个基站下的作业信号。
步骤2:重复上述步骤,直到达到收敛条件为止。在迭代过程中,所构建的代价函数值应小于预先设定的阈值。
步骤3:当基站数量为3 时,将计算出来的时延值代入如下公式:
步骤4:重复上述步骤,增加基站数量,不断迭代,直到基站数量等于预先设定的基站数为止。
步骤5:在获取理想基站数量的情况下,所获取的时延参数就是最终估计参数。将每个基站对应的终端设备作为主要路径,分解稀疏重构信号,提取信号子空间。
步骤6:在信号子空间中计算信号权重估计值,如式(7):
式中,Uk表示原子集合;μk表示投影系数。根据信号权重估计结果计算时延值,结果为:
式中,β表示噪声矢量。通过上述过程,可获取铁路货车TFDS 网络传输时延估计结果。
3 实 验
将2009 年TFDS 集中作业投入到昆明铁路局昆明北车辆段作为研究案例,该路段集中了75%的全路TFDS 三级联网设备,对基于稀疏重构的铁路货车TFDS 网络传输时延估计方法进行实验分析。
3.1 实验过程
TFDS 集中作业平台突破了以往的点到点、一成不变的工作模式,将各个车间的TFDS 动态检验员整合成一个大工作室,实现了两次最优分工,并将各个动态的车辆检验员平均分配。为了实现车辆动态检验与列检闭环管理,设计了详细的TFDS 动态检车具体流程:
步骤1:TFDS 的工作领导要在工作完成后立即通过系统和电话通知值班人员。
步骤2:列检值班员以车为单位,及时组织现场的检车员对系统预测的故障进行全面检验。
步骤3:处理故障的检验人员应将检验的结果或处理结果报告给列检值班人员,由工作人员通知检验人员并填写相应的表格。
步骤4:当一小时内没有接到车辆信息时,动态检验小组的组长要主动与相关的列检值班人员联络,确保设备处于良好状况。
步骤5:当动态检测系统出现故障时,动态测试小组的组长应立即向列检值班人员报告,并通知现场的工作人员进行现场检验。同时向5T 调度员汇报故障情况,并进行记录。
3.2 实验装置
使用高速摄像技术,通过对运行列车各个部位快速抓拍,将获取的图像压缩到计算机内存中,该过程使用的实验采集装置如图2 所示。
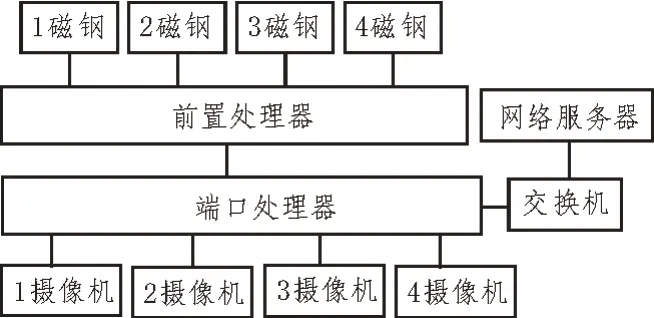
图2 实验采集装置
3.3 实验数据分析
将实验设置为两种情况,分别是无噪声干扰情况和有10 dB 噪声干扰情况。假设铁路货车TFDS 网络传输有一条信道,在有无噪声干扰情况下,时延实际结果如表1 所示。
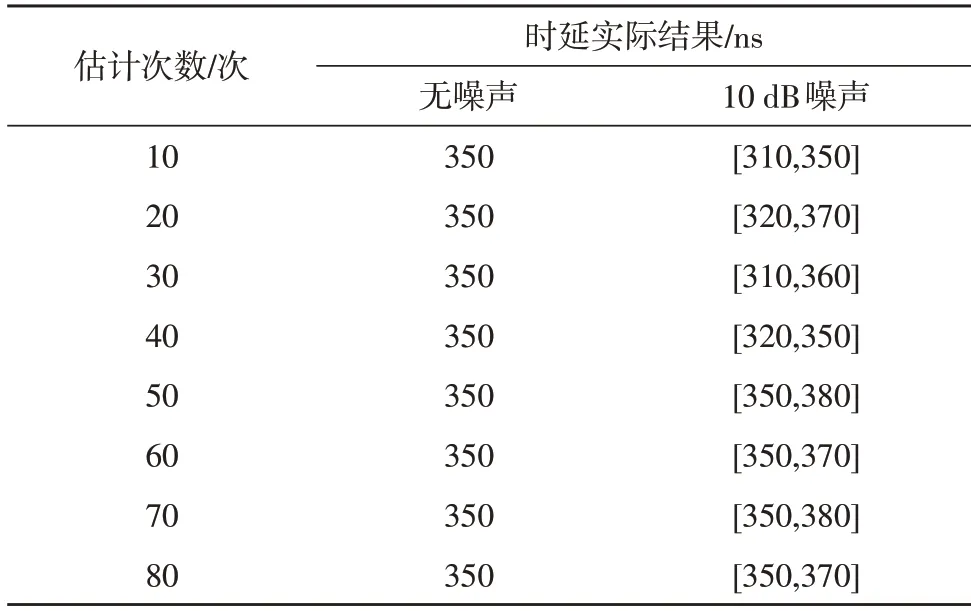
表1 有无噪声干扰时延实际结果
由表1 可知,在无噪声干扰情况下,时延不会受到其他信号干扰,保持固定数值不变。在有10 dB 噪声干扰情况下,时延受到噪声干扰,其变化范围为310~380ns。
3.4 实验结果与分析
在无噪声干扰情况下,三种方法时延估计结果如图3 所示。
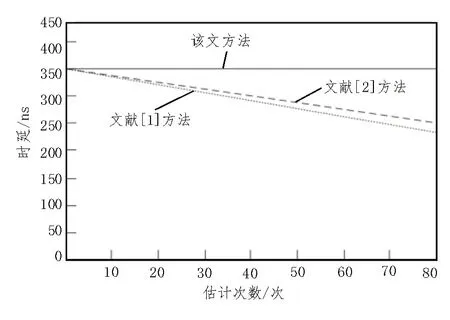
图3 无噪声干扰情况下时延估计结果
由图3 可知,使用文献[1]方法的时延估计结果由350 ns 变为234 ns;使用文献[2]方法的时延估计结果由350 ns 变为266 ns;使用所提方法时延估计结果保持350 ns 不变,这与表1 中数据一致。
在10 dB 噪声干扰情况下,三种方法的时延估计结果如图4 所示。
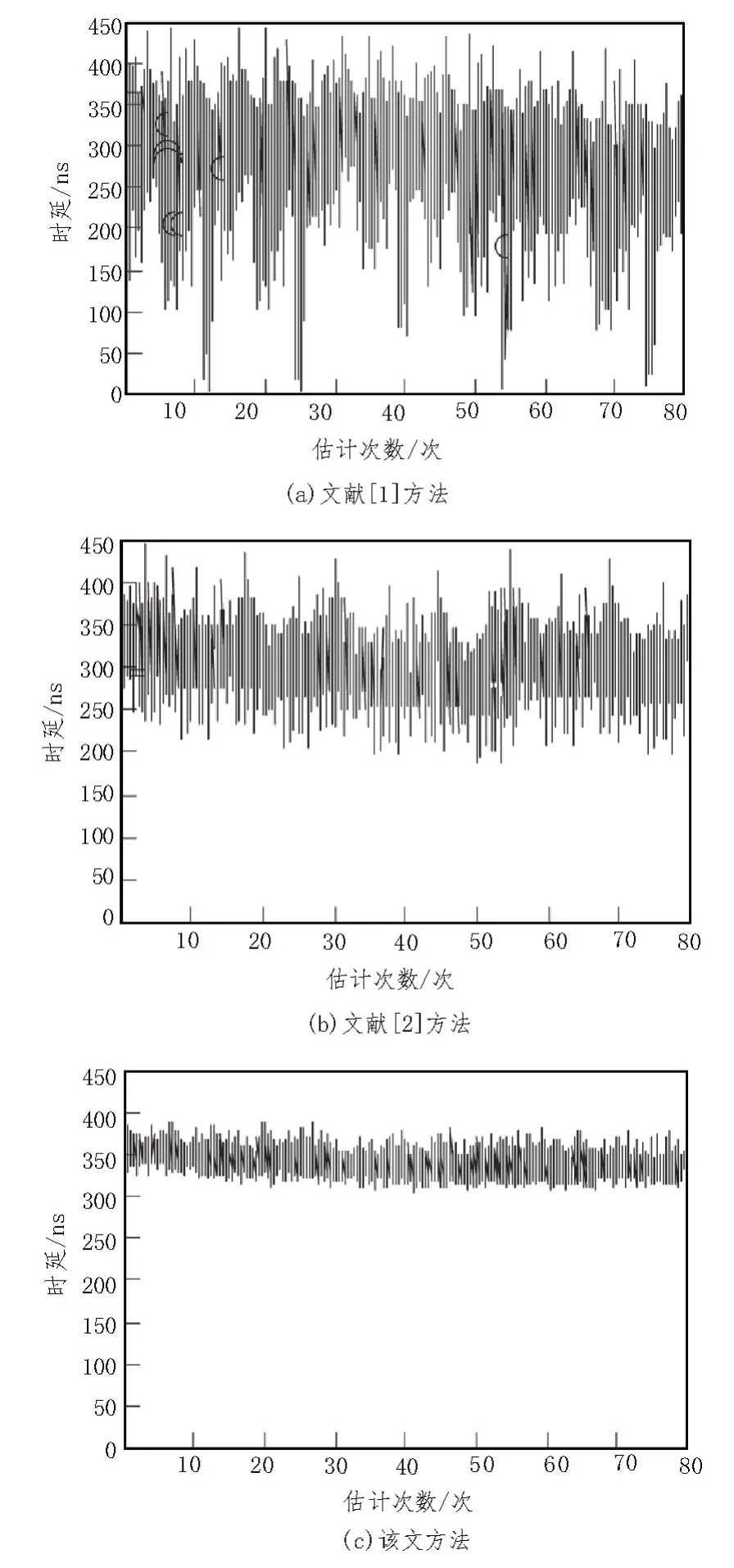
图4 10 dB噪声干扰情况下时延估计结果
由图4 可知,使用文献[1]方法、文献[2]方法时延变化范围分别为0~450 ns、200~450 ns;使用所提方法时延变化范围为310~380 ns。在上述对比结果中,使用所提方法与表1 实际值一致,说明该方法的估计结果更为精准。
4 结束语
研究了基于稀疏重构的铁路货车TFDS 网络传输时延估计方法,引入了基于稀疏字典原子匹配原理获取稀疏重构信号,以此计算信号权重估计值。根据信号权重估计结果计算铁路货车TFDS 网络传输时延估计结果,并通过实验验证了该方法研究的可靠性,可以在相关领域得到广泛应用。
猜你喜欢
幼儿画刊(2023年12期)2024-01-15 07:06:14
少儿科学周刊·儿童版(2021年22期)2021-12-11 21:27:59
少儿科学周刊·儿童版(2021年22期)2021-12-11 21:27:59
少儿科学周刊·儿童版(2021年22期)2021-12-11 06:42:32
电子制作(2019年23期)2019-02-23 13:21:12
测控技术(2018年6期)2018-11-25 09:50:10
中国交通信息化(2017年8期)2017-06-06 07:16:31
学与玩(2017年6期)2017-02-16 07:07:24
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
电测与仪表(2016年17期)2016-04-11 12:38:28