北斗三号地心运动反演方法与结果
2024-01-05 07:25郭仕伟方欣颀周凌昊
测绘学报 2023年12期
郭仕伟,施 闯,范 磊,魏 娜,张 涛,方欣颀,周凌昊
1. 北京航空航天大学电子信息工程学院,北京 100191; 2. 北京航空航天大学前沿科学技术创新研究院,北京 100191; 3. 武汉大学卫星导航定位技术研究中心,湖北 武汉 430079
地心,即地球质心(center of mass of the whole Earth system,CM),是指包括大气、海洋和陆地水在内的整个地球系统的质量中心。根据《IERS Conventions (2010)》[1],国际地球参考框架(ITRF)原点定义为CM。但是,通过空间大地测量技术实现的ITRF原点实际上为观测站网的中心,近似固体地球的形状中心(center of figure of the solid Earth,CF)[2]。根据文献[3],在ITRF2020建立以前,ITRF实现的原点在长时间尺度上是平均CM,而在季节性和更短时间尺度上应该视为CF。受地表质量重新分布的影响,CM与CF之间存在相对运动。地心运动(geocenter motion)通常是指地心CM相对于框架原点CF的运动[4]。
随着空间大地测量技术对地观测精度的不断提高,地心运动已经成为建立毫米级地心参考框架不可忽略的误差源[5-6]。长期以来,卫星激光测距(SLR)被认为是最精密的地心运动监测手段[3,7]。但是SLR跟踪站较少且南北半球分布不均匀,这导致SLR解算的地心运动易受测站网效应的影响[8]。随着GNSS误差改正模型的持续精化和数据处理精度的不断提高,GNSS正在越来越多地用于地心运动研究[2,9]。文献[10]利用国际GNSS服务组织(IGS)提供的GPS周解数据反演地心运动,指出GPS地心运动Z方向周年项与SLR存在一定差异。文献[11]表明GPS和GLONASS地心运动Z方向GNSS交点年信号的奇数谐波比较显著。文献[12]评估了不同太阳光压模型估计的地心运动,指出GPS和Galileo联合解算的地心运动具有更高的可靠性。文献[13]指出在GNSS定轨中将测站网原点约束到先验框架并估计地心运动参数,站坐标北、东、高方向重复性分别提高71%、50%、29%。文献[14]证明先验Box-wing模型有效提高了BDS定轨精度,有助于削弱BDS地心运动中的交点年信号。
2020年7月31日,我国北斗三号系统(BDS-3)正式开通,面向全球提供服务。目前,BDS-3中圆地球轨道(MEO)卫星达到24颗,已经具备用于地心运动和地球自转参数(ERP)等大地测量参数研究的潜力[14-16]。然而,国际上基于GNSS的地心运动研究主要采用GPS和GLONASS,利用Galileo观测数据的地心运动研究近年来也有所开展。关于BDS地心运动的研究较少,其中BDS-3解算的地心运动精度及未识别的系统性误差特征均有待深入研究。本文利用IGS多GNSS试验(MGEX)[17]网提供的BDS-3 MEO卫星观测数据反演地心运动。首先,评估BDS-3解算的地心运动时间序列的稳定性,并通过频谱分析确定BDS交点年信号等系统误差的量级;然后,分析BDS-3地心运动的估计误差随卫星轨道面太阳高度角的变化规律;最后,定量分析地心运动和轨道参数之间的相关性。
1 利用BDS-3的地心运动估计方法
1.1 基本理论
根据轨道力学的基本理论,人造地球卫星受轨道动力学约束围绕地心CM运动,而卫星的地面观测站固定在地球表面。通过地面观测站的卫星观测数据,可以计算出地心CM与固体地球形状中心CF之间的相对位置变化。
在地心惯性坐标系中,测站与卫星之间的位置关系可以表示为
(1)
式中,ρ表示地面观测站与卫星之间的几何距离;r为以地心CM为原点的卫星位置矢量;R为以地心CM为原点的测站位置矢量;Rf为CF框架(地固坐标系)下测站的位置矢量;Rg为CF框架下地心CM的位置矢量;P、N、U、X/Y分别表示地固坐标系与惯性坐标系转换时的岁差、章动、地球自转、极移等必要改正项。
地心运动可以通过三维坐标来表达。在卫星精密定轨中,将地心运动设置为待估参数,并将测站坐标强约束(或固定)到先验CF框架(如IGS14[18]),则可以直接求解地心运动。
1.2 最小约束条件
GNSS解算地心运动一般需要同时估计卫星轨道、站坐标、ERP和地心运动等参数。然而,卫星轨道、站坐标和地心运动同时解算将导致法方程缺少位置基准,卫星轨道、站坐标和ERP同时估计导致法方程缺少定向基准。法方程总秩亏数为6,包括3个平移和3个旋转参数。因此必须附加一定的基准约束消除法方程秩亏[19]。为避免约束过度,同时又不影响网的内部结构,可以采用最小约束方法[20],通过无整网平移(no-net-translation,NNT)和无整网旋转(no-net-rotation,NNR)条件将测站坐标约束到先验框架IGS14。

(2)
式中,Ti(i=x,y,z)表示3个平移参数;D表示尺度参数;Ri(i=x,y,z)表示3个旋转参数。
X1=Xr+Bη
(3)
根据最小二乘原理,Helmert七参数可表达为
η=(BTB)-1BT(X1-Xr)
(4)
NNT条件满足两个框架之间平移参数为0,NNR条件满足旋转参数为0,即
(5)
将式(5)作为约束条件引入误差方程,即可将测站坐标对准到先验框架IGS14,解决法方程秩亏问题。
1.3 地心运动参数及其估计误差的求解
包含测站坐标、地心运动、卫星轨道等参数的误差方程为
(6)

根据式(4)和式(5),最小约束条件的一般形式为
(BTB)-1BT(X1-Xr)=0
(7)
(8)
联合式(6)和式(8),可得施加最小约束条件的误差方程,如下
(9)
假定相位/伪距观测值的权阵为P,约束条件的权阵为PC,根据广义最小二乘原理可推导法方程为
(10)
(11)
式中,QGG为Q中地心运动参数位置的对角线元素。
2 数据处理
本文数据处理采用北京航空航天大学研发的大地测量时空数据分析与研究软件(简称GSTAR)。详细数据处理策略见表1。目前GPS仍然是最成熟的卫星导航系统,且文献[12]研究表明在GPS、GLONASS和Galileo三系统中GPS地心运动结果更稳定。因此本文采用相同的数据处理策略,分别采用BDS-3MEO卫星、GPS、BDS-3 MEO+GPS数据计算地心运动,并进行对比分析。
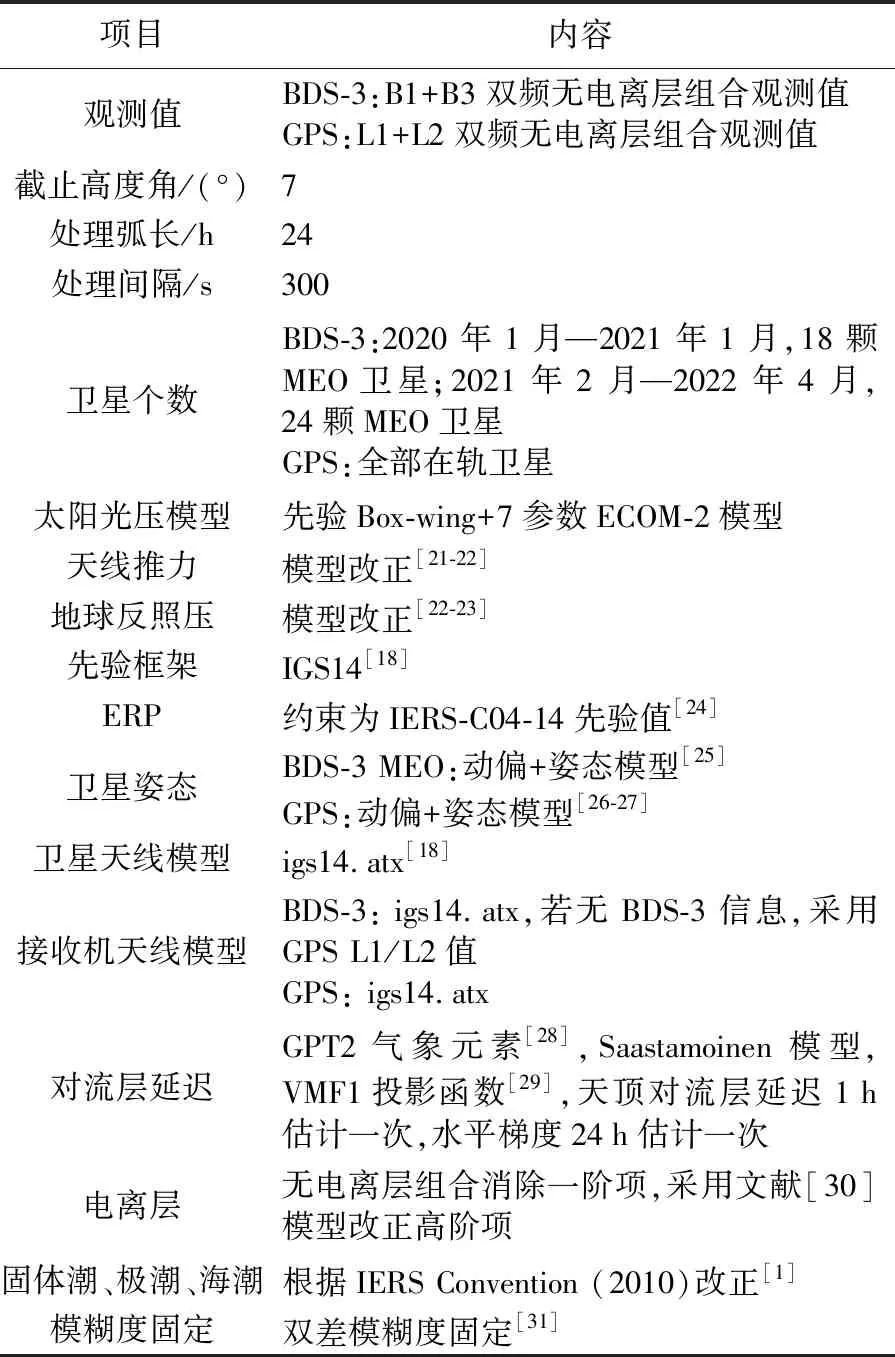
表1 地心运动估计的数据处理策略
选取99个支持观测BDS-3和GPS的IGS MGEX全球站,利用2020年1月—2022年4月共851 d数据,分别进行BDS-3单系统、GPS单系统及BDS-3+GPS双系统地心运动估计。数据处理采用双频无电离层组合观测值,卫星钟差、接收机钟差作为白噪声类型估计,采用文献[31]的方法将相位模糊度参数固定为整数。测站分布如图1所示。在选取的99个测站中,有58个测站属于IGS14框架站,通过最小约束条件进行基准定义;对其余测站坐标进行自由估计。
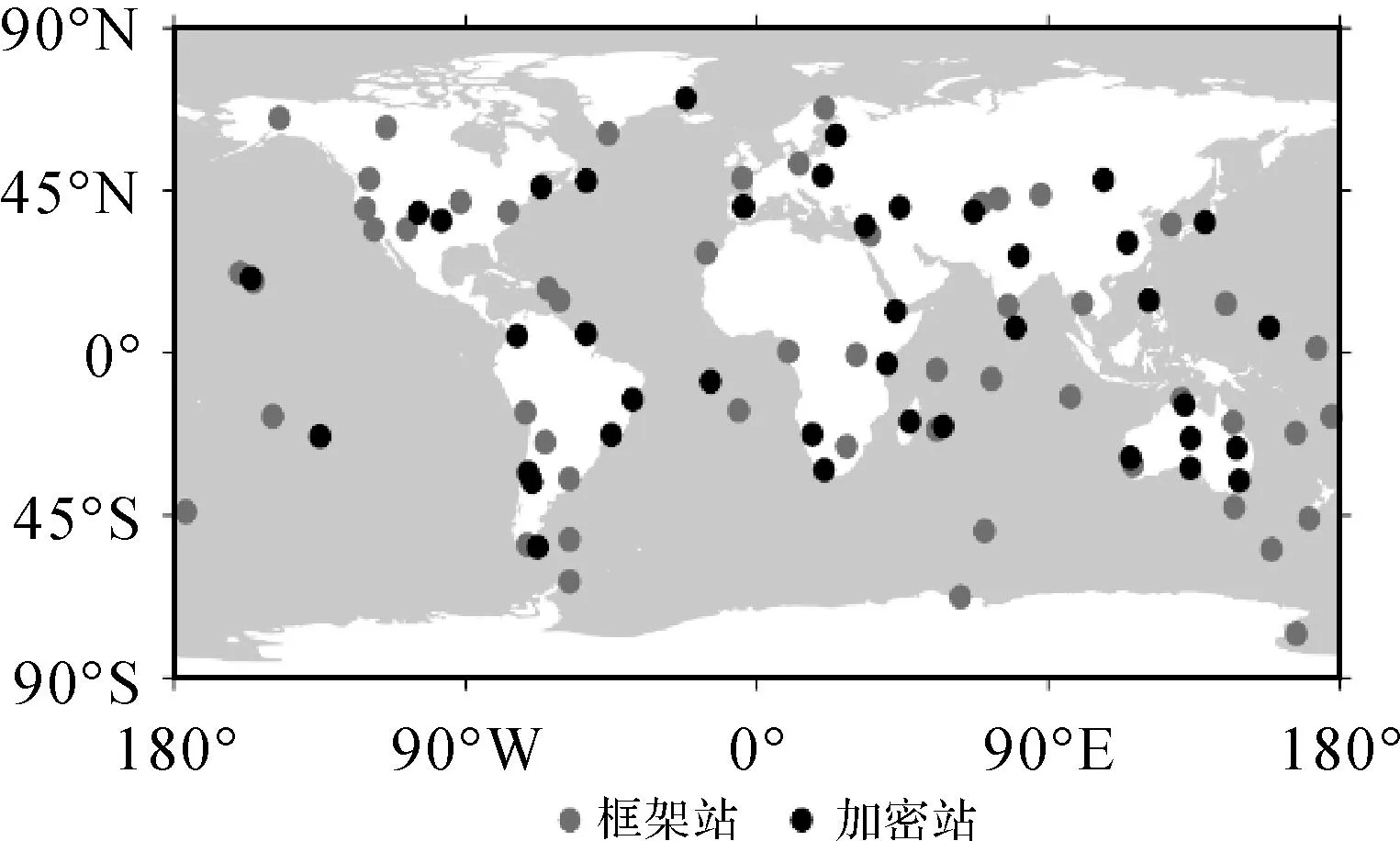
图1 测站分布Fig.1 Distribution of stations
卫星光压力模型误差是GNSS地心运动的主要误差源之一。目前,ECOM系列模型[32-33]是GNSS卫星精密定轨常用的经验型光压模型之一。对于GPS卫星,简化的5参数ECOM模型(ECOM-1)能够获得较好的定轨精度,在IGS及其分析中心得到长期广泛使用。但是,由于卫星的结构不同、材质差异等因素,ECOM-1模型并不能较好地适用于GLONASS、Galileo及BDS卫星[22,33]。因此,文献[33]提出了ECOM-2模型。研究表明,7参数的ECOM-2模型在BDS-3 MEO卫星连续偏航控制模式下具有更好的定轨性能[34]。近年来,研究发现在ECOM模型的基础上,加入先验Box-wing模型可以改善导航卫星定轨精度[35-36]。为保证数据处理策略的一致性,本文BDS-3和GPS定轨均采用先验Box-wing模型+7参数ECOM-2模型。BDS-3先验Box-wing模型参数采用中国卫星导航系统管理办公室发布的卫星属性信息(http:∥en.beidou.gov.cn/SYSTEMS/Officialdocument/201912/P0202 00323536298695483.zip),GPS先验Box-wing模型参数采用IGS推荐值(http:∥acc.igs.org/repro 3/PROPBOXW.f)。7参数ECOM-2模型的表达式如下
(12)
式中,D(u)、Y(u)、B(u)分别表示卫星在D(卫星-太阳连线方向)、Y(太阳帆板旋转轴方向)、B(与D、Y方向构成右手坐标系)方向的加速度,包括常量部分和周期部分;u表示卫星纬度幅角(satellite's argument of latitude);us表示太阳纬度幅角(Sun's argument of latitude);Δu表示卫星相对于太阳的轨道角。
GNSS卫星偏航姿态是影响精密定轨精度的另一个重要因素。BDS-3 MEO卫星采用连续动偏模式,在太阳高度角±3°左右发生正午机动和午夜机动[22]。文献[25]研究表明,对于采用连续动偏模式的BDS卫星,错误地采用零偏模式对轨道重叠弧段和卫星钟差的影响可达分米级。BDS-3 MEO卫星在地影期间,本文采用文献[25]推荐的姿态模型。本文数据处理所涉及的GPS卫星同样采用动偏模式,其在地影期间采用文献[26—27]的姿态模型。
2021年2月以前可观测到BDS-3 C41—C46卫星的测站较少。因此,2020年1月—2021年1月期间BDS-3数据处理仅采用C19—C37等18颗MEO卫星,而2021年2月—2022年4月采用所有24颗MEO卫星。图2统计了2020年1月—2022年4月BDS-3和GPS每天实际可用的跟踪站数目和多余观测数(多余观测数=观测值个数-参数个数)。可以看出,BDS-3和GPS实际可用测站数基本相等,每日平均可用测站数约85个。由于2020年只有18颗BDS-3 MEO卫星参与计算,BDS-3每日多余观测数仅约为22万个,这一数值显著低于GPS约43万的平均水平。自2021年2月起,24颗BDS-3 MEO卫星全部参与计算,每日多余观测数有明显提高,达到约36万个,但仍然略低于GPS的平均水平。
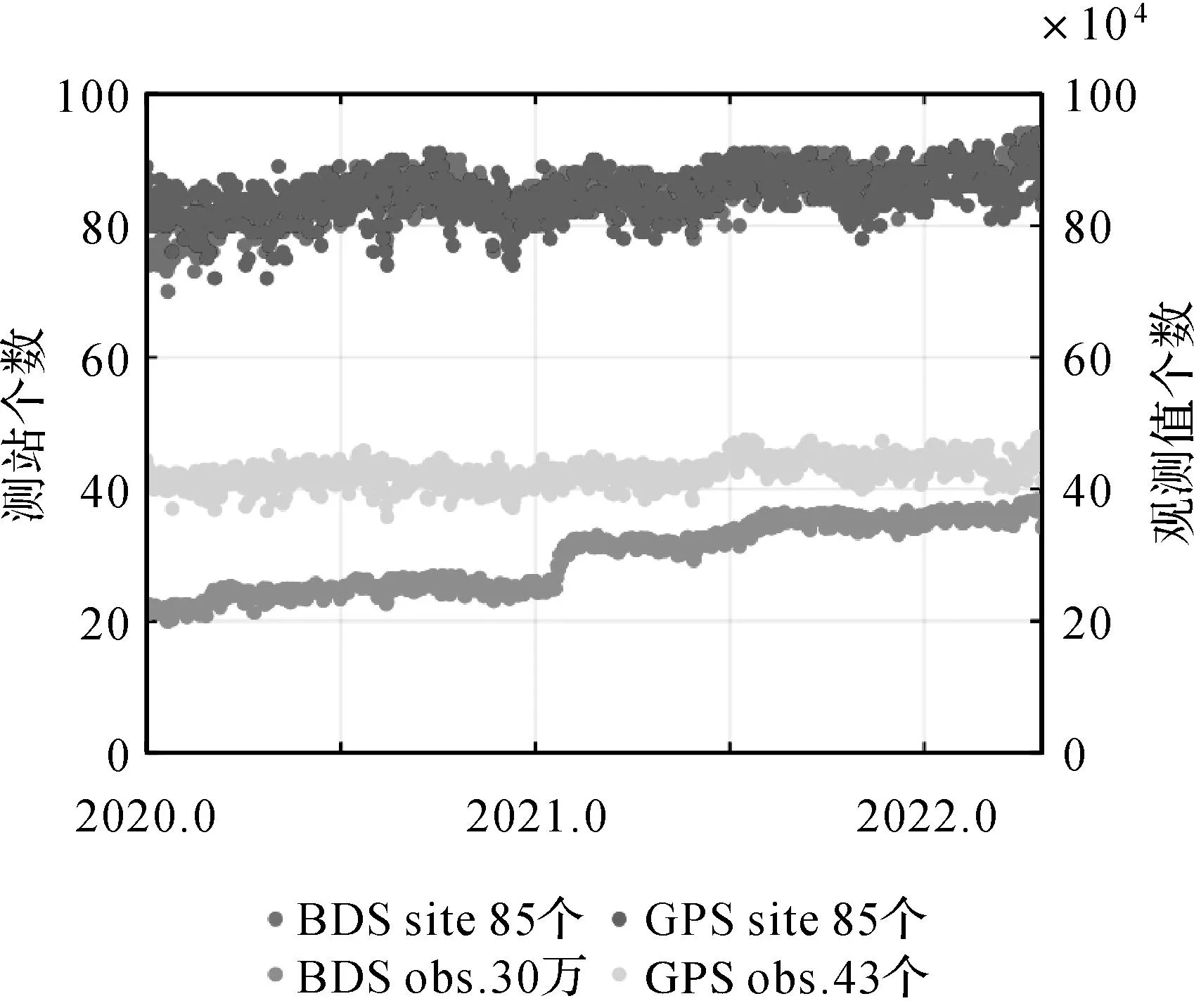
图2 2020年1月—2022年4月BDS和GPS实际可用的跟踪站数目和多余观测数Fig.2 Available stations and freedom of normal equations for BPS and GPS from January, 2020 to April, 2022
3 结果与分析
3.1 地心运动时间序列与频谱分析
图3展示了利用BDS-3、GPS、BDS-3+GPS数据估计的地心运动坐标时间序列。作为参考,图3同时展示了IGS提供的组合地心运动产品的时间序列。IGS组合地心运动由各分析中心提供的SINEX产品合并得到,其中少数分析中心产品采用GPS+GLONASS解算,其余分析中心产品采用GPS解算。可以看出,地心运动X和Y方向稳定性较好,并且BDS-3和GPS估值具有较好的一致性,但是在地心运动Z方向估值差异较大。统计结果表明,X、Y和Z方向BDS地心运动时间序列的标准差(STD)分别为6.7、6.9和23.4 mm,相应的GPS地心运动时间序列的STD为4.6、5.6和11.5 mm。这表明BDS-3地心运动的稳定性略低于GPS,尤其是BDS-3 Z方向周期性信号更显著。结合图2和图3可以发现,随着2021年2月以来BDS-3观测值数目的增长,BDS-3X和Y方向地心运动稳定性有所提高。2020年BDS-3X和Y方向的STD分别为7.4和7.8 mm,2021年STD分别减小6.1和6.2 mm,分别提高了18%和21%。这一结果说明观测量的增加对提升BDS-3地心运动估值的稳定性有显著效果。与单系统结果相比,BDS-3+GPS地心运动较单BDS-3结果有显著提高,X、Y和Z方向STD分别为5.6、6.2和11.6 mm。
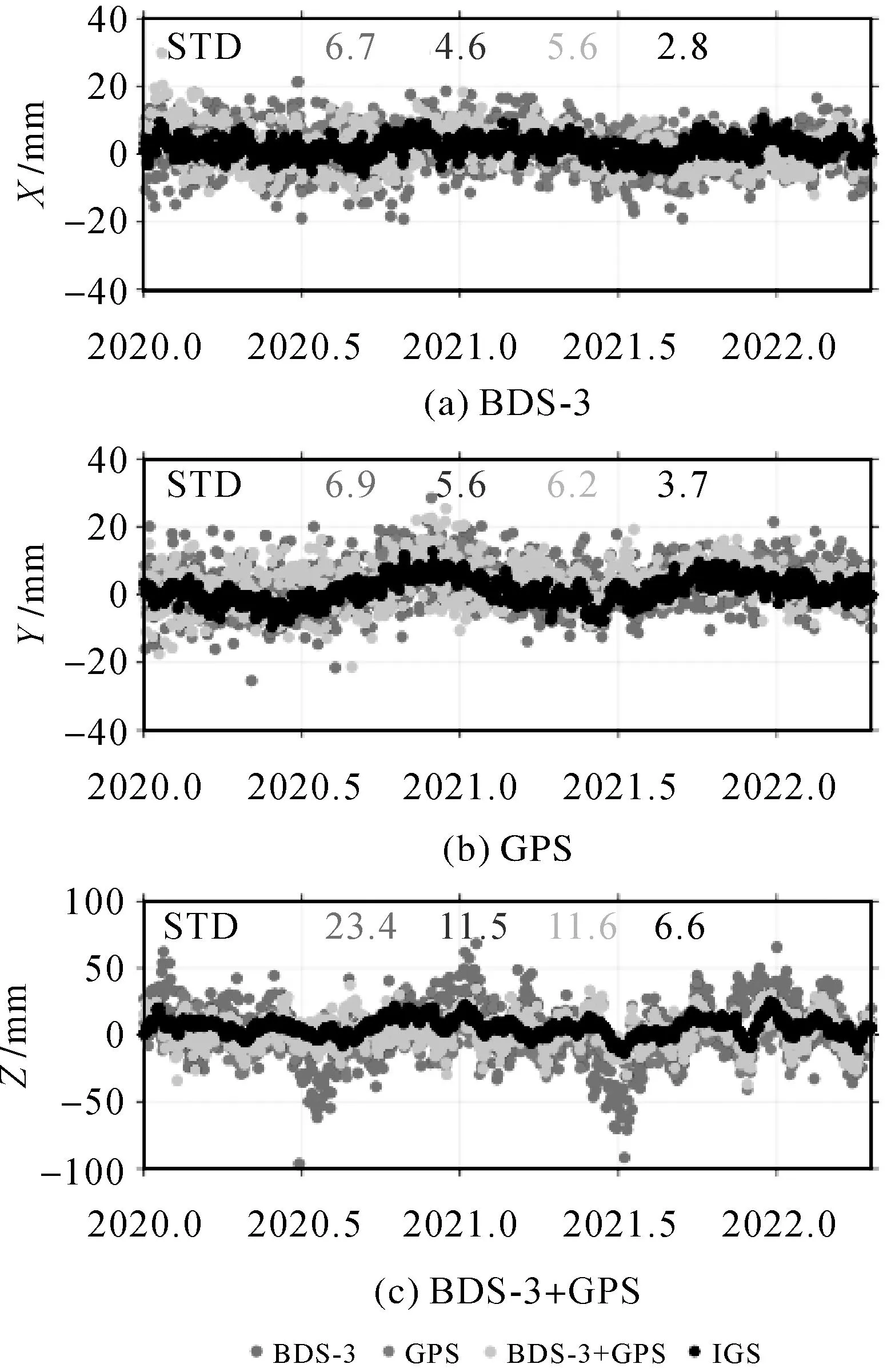
图3 BDS-3、GPS、BDS-3+GPS估计的地心运动坐标Fig.3 Geocenter motion derived from BDS-3, GPS and BDS-3+GPS
表2统计了BDS-3、GPS、BDS-3+GPS地心运动与IGS组合地心运动之间的差异。总体上看,BDS-3和GPS地心运动在X和Y方向与IGS产品一致性较好,但是Z方向与IGS产品差异较大。统计结果表明,X、Y和Z方向BDS-3地心运动与IGS产品之间的差异(以均方根误差RMS为指标)为6.4、7.0和21.6 mm,GPS地心运动与IGS产品的差异为4.1、4.4和11.1 mm,BDS-3+GPS地心运动与IGS产品的差异为5.4、6.1和10.6 mm。可以看出,BDS-3+GPS地心运动Z方向与IGS产品一致性更好。
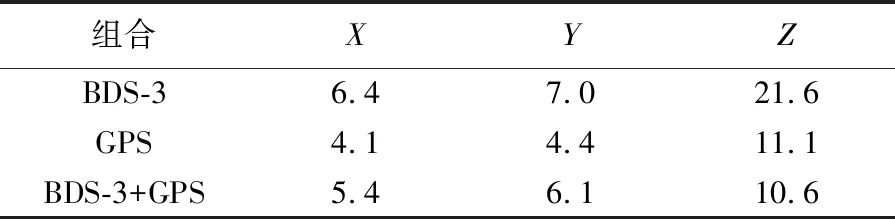
表2 BDS-3、GPS、BDS-3+GPS地心运动与IGS组合地心运动之间差异的RMS
图4展示了地心运动时间序列的振幅谱。图4中垂直方向虚线表示GNSS交点年信号的谐波、7.4 d和7 d的周期信号。GNSS交点年是指GNSS卫星轨道交点相对于太阳的重复周期[37],其中BDS-3卫星约354 d或1.03 cpy(cycles per year),GPS卫星约351 d或1.04 cpy。文献[38]指出,长周期的轨道模型误差,特别是一年两次的地影期,是GNSS交点年信号的直接影响因素。BDS交点年与GPS交点年的周期十分接近,本文GNSS交点年谐波的频率统一表示为Frequency=1.04 cpy×N(N为正整数)。由图4可以看出,BDS-3地心运动Z方向存在明显的交点年信号的奇数谐波,其中第1个、第3个、第5个及第7个谐波的振幅分别为19、8、13和7 mm。其中,第3个谐波可能与3个轨道面的星座设计有关,第5个和第7个谐波可能与不同轨道面太阳高度角为0°的时间间隔(约76 d)、两个轨道面太阳高度角相同的时间间隔(约52 d)有关[12,16]。
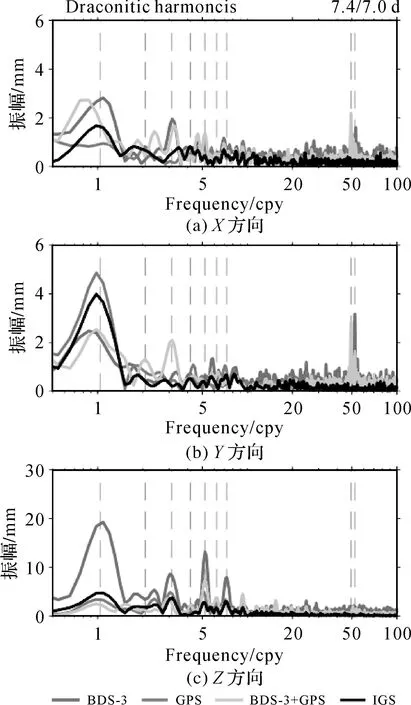
图4 BDS-3和GPS地心运动时间序列的振幅谱Fig.4 Amplitude spectra of BDS-3-based and GPS-based geocenter motion
与BDS-3相比,GPS地心运动的交点年信号较弱,仅第3个和第5个谐波比较明显,振幅约4 mm。相比Z方向,X方向BDS-3和GPS交点年信号相对较弱,仅第1个和第3个BDS交点年谐波相对显著,其振幅为2~3 mm。对于Y方向,仅第1个交点年谐波比较显著,BDS和GPS交点年信号的振幅分别约2.4和5 mm。BDS-3地心运动时间序列中显著的交点年信号表明BDS-3轨道模型尚需要进一步精化。
由图4可以明显看出,BDS-3X和Y方向有周期约7 d(52.36 cpy)的异常信号,其振幅为2~3 mm。目前在SLR解算的地心运动以及地球物理模型中未发现类似的7 d信号,该信号可能来自BDS-3系统误差。值得注意的是,BDS-3 MEO卫星的轨道运行周期为12 h 50 min,相应的地面重复周期为7 d,约52.18 cpy,与本文发现的7 d周期信号具有相近的频率。此外,在BDS-3+GPS双系统解的X和Y方向存在周期约7.4 d的异常信号。
为了进一步分析这些信号的来源,笔者计算了卫星的轨道运行周期与地球自转周期(23 h 56 min)形成的拍频(beat frequency)。拍频的周期Tbeat可以表示为[13]
(13)
式中,Tearth表示地球自转周期;Tsat表示卫星轨道运行周期;N表示令N·Tsat最接近Tearth的正整数。对于BDS-3 MEO卫星,Tsat=12 h 50 min。令N=2代入式(13),计算可得Tbeat≈7.4 d[16]。根据频谱分析理论,为分离周期为T1和T2的两个信号,所需的时间序列长度至少为
(14)
将BDS-3 MEO卫星的地面重复周期(7 d)与拍频周期(7.4 d)代入式(14),计算可得二者分离所需的最短时间序列长度约为130 d。
本文地心运动时间序列长达851 d,足以区分BDS-3 MEO卫星的地面重复周期和拍频周期。但是,在BDS-3地心运动的频谱中并未发现与BDS-3 MEO卫星拍频周期有关的异常信号。综合以上分析可以判断得出,BDS-3 MEO卫星的轨道重复周期可能是引起地心运动时间序列中7 d信号的主要因素,而拍频周期可能是引起BDS-3+GPS地心运动中7.4 d信号的主要因素。关于7 d和7.4 d信号在BDS-3、BDS-3+GPS地心运动结果中的差异,尚需要进一步深入研究。
3.2 地心运动估计误差分析
地心运动参数某分量的精度衰减因子(dilution of precision,DOP)[38]可表示为
(15)

图5展示了地心运动的估计误差随卫星轨道面太阳高度角β的变化。左纵坐标轴表示估计误差(彩色实线),右纵坐标轴表示太阳高度角β的绝对值(|β|,黑色实线)。图中垂直方向的两条绿色实线分别表示估计误差时间序列的一个波峰(BDS-3对应年积日2021年177 d,GPS对应年积日2021年274 d)和波谷(BDS-3对应年积日2021年216 d,GPS对应年积日2021年297 d)。估计误差和太阳高度角的变化周期均小于1个自然年,为方便阅读,图中仅展示了2021—2022年的结果。
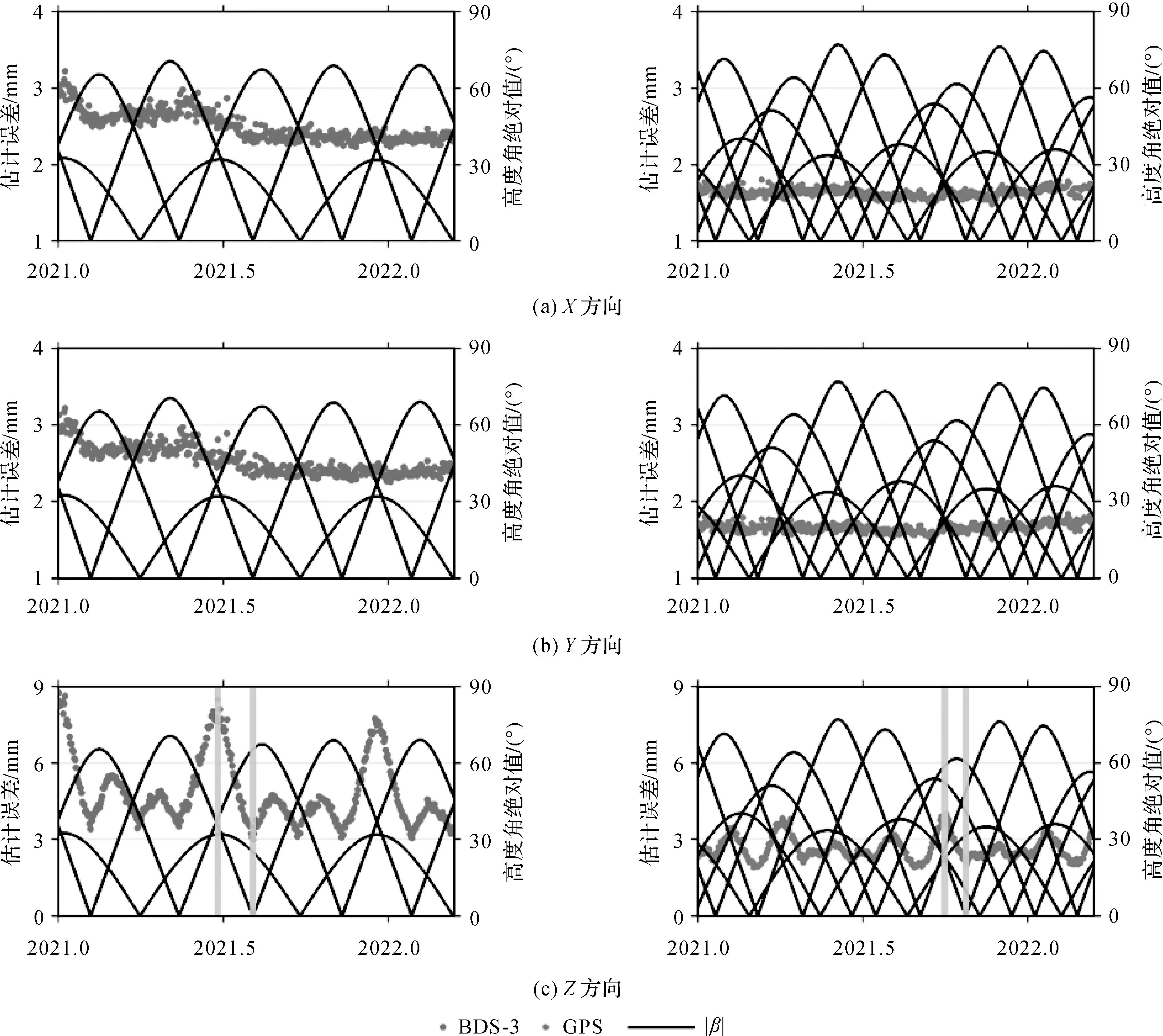
图5 BDS-3(左)和GPS(右)地心运动估计误差随太阳高度角绝对值|β|的变化Fig.5 Formal errors of the geocenter motion and the Sun elevation angle |β|. The left is for BDS-3, and the right is for GPS
由图5可以发现,X和Y方向估计误差量级相当,且随时间变化较为平稳,BDS-3估计误差平均约2.8 mm,GPS估计误差平均约1.7 mm。Z方向估计误差量级较大,且随太阳高度角呈现出明显的周期性变化。BDS-3Z方向估计误差为3~9 mm,平均约5.3 mm;GPSZ方向估计误差为2~4.5 mm,平均约2.7 mm,这一量级与文献[12]分析结果一致。与GPS相比,BDS-3地心运动的估计误差偏大。这一现象的主要原因可能来源于3个方面:①BDS-3 MEO星座只有3个轨道面,而GPS星座多达6个轨道面,更多的轨道面可以为GNSS地心运动解算提供更好的观测条件[12];②BDS-3仅有24颗MEO卫星参与计算,这使得BDS-3观测值数量明显少于GPS;③与GPS相比,BDS-3误差改正模型尚不完善,尤其是光压力模型尚需要改进。
为了进一步说明星座轨道面和观测值数量对估计误差的影响,图6对比了BDS-3、GPS、BDS-3+GPS地心运动的估计误差。与单系统结果相比,BDS-3+GPS解中X、Y和Z方向估计误差均有显著减小,平均值分别为1.3、1.3和2.1 mm。由于BDS-3与GPS轨道面设计的差异,Z方向BDS-3的波峰(或波谷)与GPS的波谷(或波峰)有相互抵消的作用,BDS-3+GPS解算的估计误差比单系统结果更稳定。
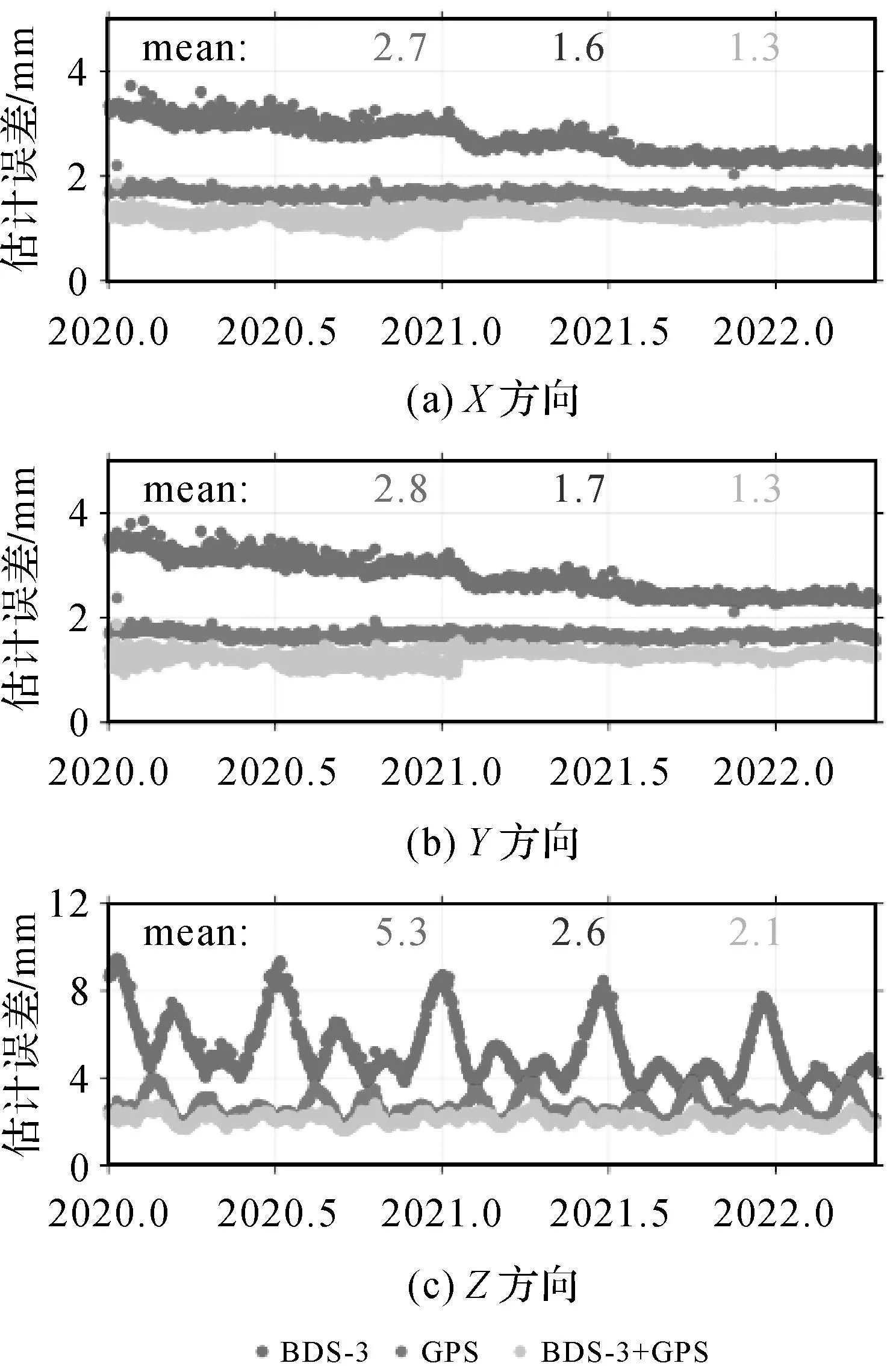
图6 BDS-3、GPS、BDS-3+GPS地心运动的估计误差Fig.6 Formal error time series for the geocenter motion of BDS-3, GPS, BDS-3+GPS
此外,由图5可以看出,Z方向估计误差与太阳高度角的变化密切相关。对于BDS-3,估计误差时间序列在一个交点年周期内有1个主波峰和2个次波峰。当BDS-3 MEO星座3个轨道面的太阳高度角绝对值|β|大致相等时(如2021年177 d),估计误差达到主波峰约9 mm;当任意两个轨道面|β|相等,且小于第3个轨道面|β|时,估计误差达到次波峰;当任意一个轨道面|β|≈0°,且其他两个轨道面|β|远大于0°时(如2021年216 d),估计误差达到最小值约3 mm。可以发现,太阳高度角为β与-β时的估计误差量级相当,这是因为两种情况下具有相近的卫星几何构型。在一个GNSS交点年周期内,一个轨道面出现2次β=0°,即卫星几何构型的重复周期为1/2交点年。在3个轨道面的共同作用下,Z方向估计误差的主要周期为1/2、1/4、1/6交点年,如图7所示。通过以上分析可知,虽然地心运动时间序列和估计误差时间序列中的交点年谐波信号均与太阳高度角的变化周期(1个交点年)有关,但地心运动中的交点年信号主要反映了GNSS轨道模型误差和卫星几何构型对估值的综合影响,而估计误差中的交点年信号则主要反映了卫星几何构型的变化。与BDS-3 MEO星座相比,GPS包含6个轨道面,可有效改善卫星的空间构型,在降低估计误差量级的同时可以削弱这种周期变化。由图7可以看出,GPSZ方向估计误差的主要周期为1/6交点年。
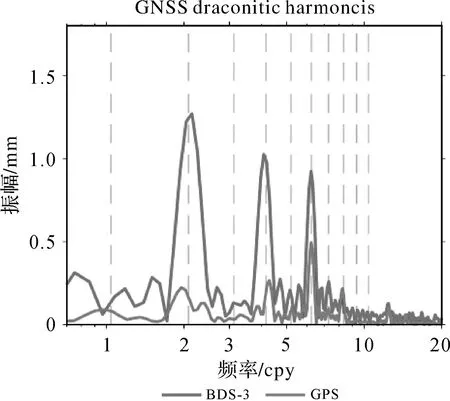
图7 地心运动Z方向估计误差时间序列的振幅谱Fig.7 Amplitude spectra of the formal error time series for the geocenter motion Z component
3.3 地心运动Z方向与轨道参数的相关性分析
由前文分析可知,Z方向估计误差变化与卫星轨道面的空间构型有关。因此,Z方向与卫星轨道参数之间的相关性变化也与轨道面空间构型变化有着密切的联系[12]。图8展示了Z方向与不同轨道面卫星轨道参数之间的相关系数。其中,图8(a)表示估计误差为局部最大值(BDS-3为2021年177 d、GPS为2021年274 d)的相关系数,图8(b)表示估计误差为局部最小值(BDS-3为2021年216 d、GPS为2021年297 d)的相关系数。由于同一轨道面不同卫星的相关系数差异较小,因此每个轨道面仅选取1颗卫星进行展示。
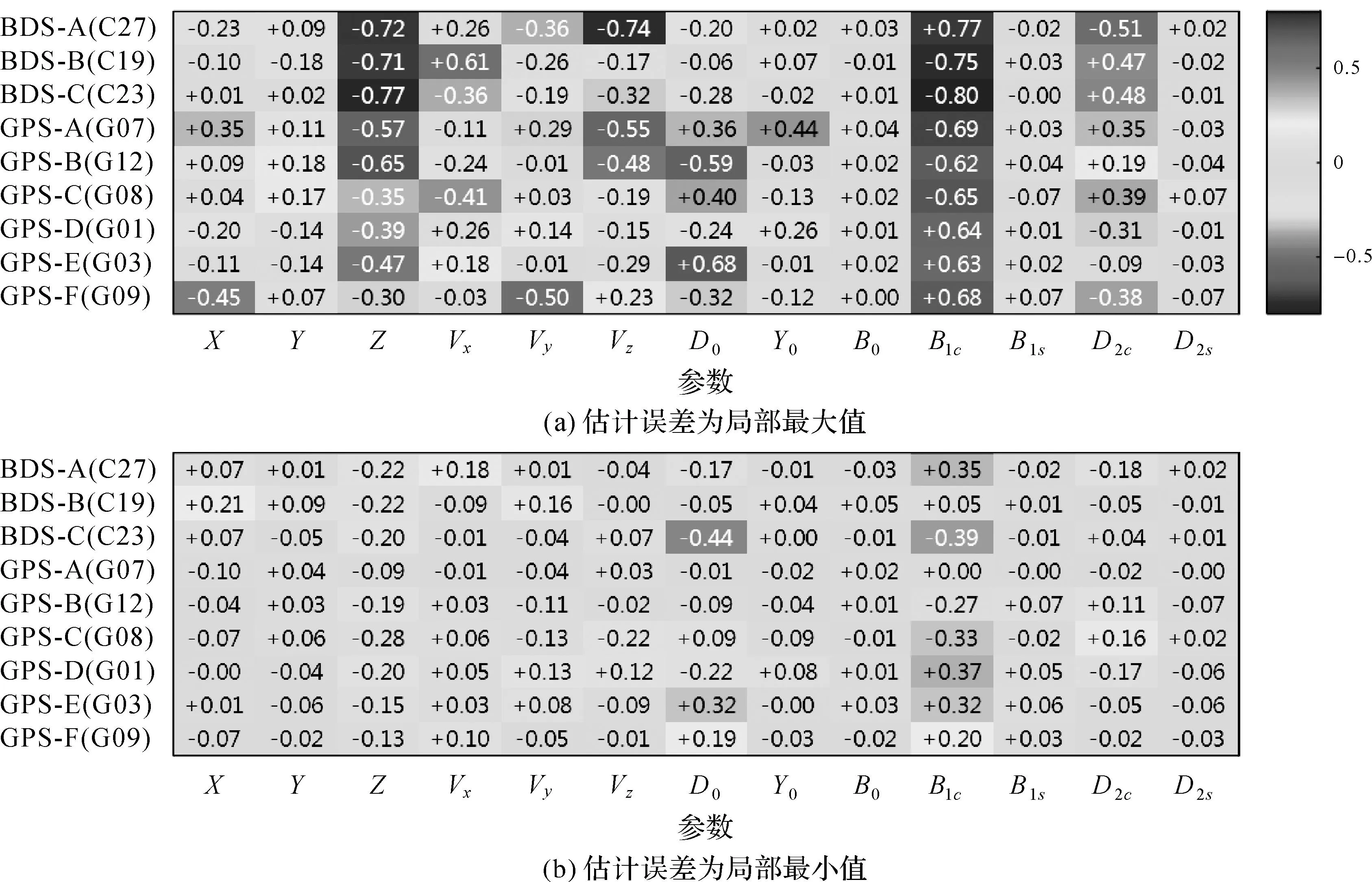
图8 地心运动Z方向与轨道参数的相关系数Fig.8 Correlation coefficient between the geocenter motion Z component and the orbit parameters
结合图5和图8可以看出,当估计误差取得局部最大值时, 所有轨道面的太阳高度角整体上相对较高(BDS-3为30°~35°,GPS为20°~60°),此时Z方向与轨道参数具有强相关性。其中,BDS-3Z方向与ECOM-2模型B1c参数的相关系数最大值为0.8,与D2c参数的相关系数最大值为0.5,不同轨道面的相关系数差异较小。对于GPS,Z方向与B1c参数的相关系数为0.6~0.7,与部分轨道面卫星D2c参数的相关系数可达0.4。GPSZ方向与D0参数的相关系数为0.2~0.6。与GPS相比,BDS-3Z方向与ECOM-2模型参数之间的相关性更高。除光压参数以外,地心Z方向与轨道Z方向具有强相关性。
图9展示了地心Z方向与C19、C23和C27卫星D0、B1c、D2c参数之间的相关系数ρ随轨道面太阳高度角β的变化。左纵坐标轴表示相关系数(彩色实线),右纵坐标轴表示太阳高度角β(黑色虚线)。可以看出,相关系数与太阳高度角β具有相同的变化周期,约1个BDS交点年。当任一轨道面太阳高度角β=0°时,Z方向与该轨道面卫星D0、B1c、D2c参数的相关系数几乎为0;当太阳高度角β的绝对值约为40°时,Z方向与D0、B1c、D2c参数的相关性较强,相关系数分别最高可达0.7、0.8、0.5。
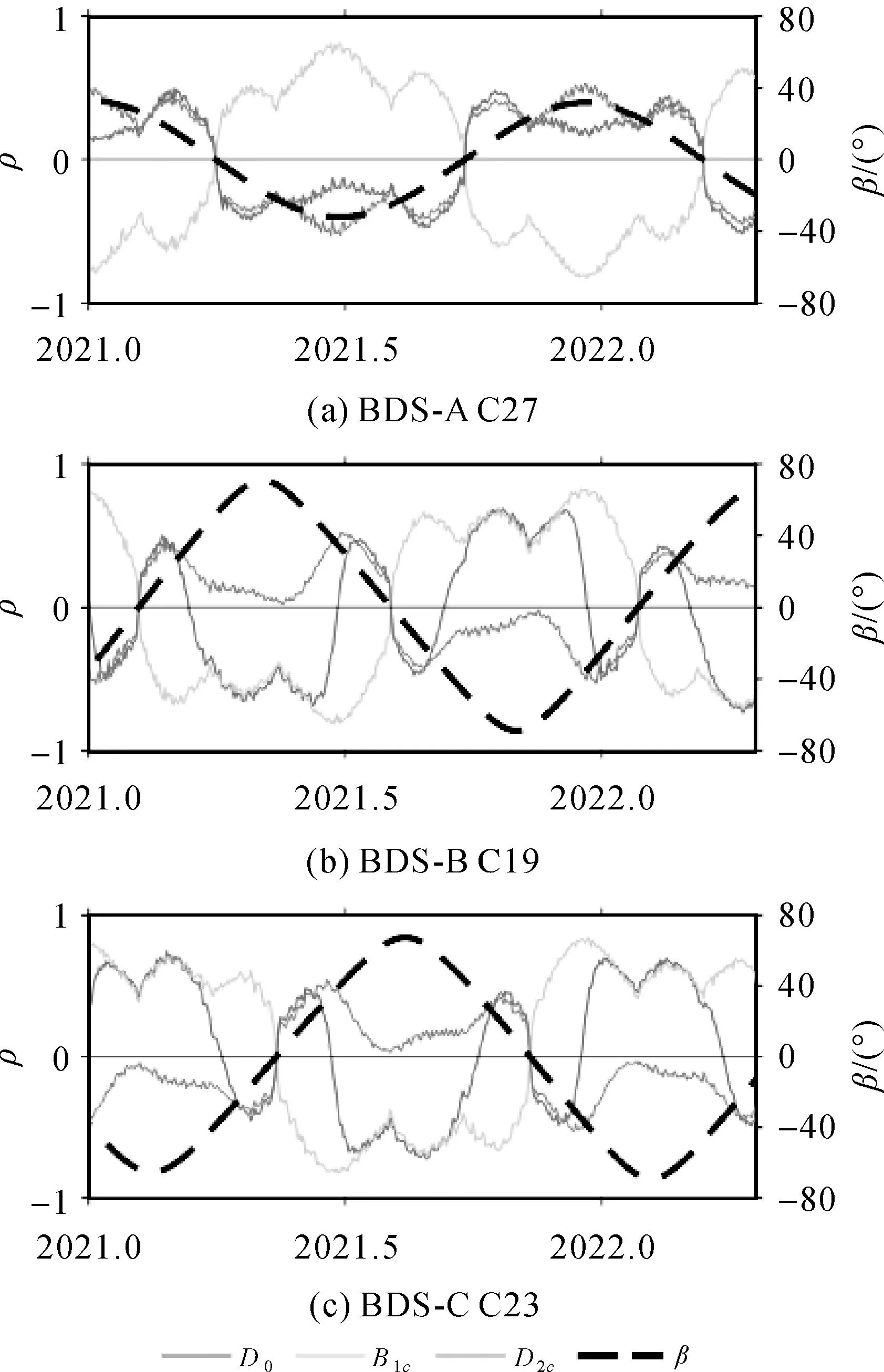
图9 BDS-3地心运动Z方向与ECOM2模型参数之间的相关系数ρ随太阳高度角β的变化Fig.9 Correlation coefficient ρ between the BDS-3 geocenter motion Z component and the ECOM2 parameters along with the Sun elevation angle β
由以上分析可知,当BDS-3 MEO星座任一轨道面太阳高度角为0°且其余轨道面太阳高度角远大于0°时,Z方向与光压参数的相关性显著降低,估计误差取得局部最小值。就估计误差来说,此时的卫星几何构型更有利于地心运动参数解算。需要指出的是,当太阳高度角为0°时,地影期的定轨误差会影响地心运动的解算精度。当BDS-3 MEO星座3个轨道面太阳高度角接近时,卫星几何构型较差,Z方向与光压参数的相关性显著增强,此时估计误差取得局部最大值,并且地心Z方向估值不稳定,与GPS和IGS地心运动的差异较大(图3)。此外,在选择相同的卫星和地面站时,即在卫星几何构型和观测值数量相同的情况下,待估计的光压模型参数越多,Z方向与光压模型参数之间的相关性越强[12]。尤其是在卫星几何构型较差时,Z方向与光压模型参数之间的强相关性可显著增大地心运动参数的估计误差。因此,在保证GNSS定轨精度的前提下,应尽可能减少光压模型的待估参数。
4 结 论
本文利用BDS-3观测数据估计地心运动,详细分析了BDS-3地心运动时间序列的稳定性、地心运动参数的估计误差及地心运动与卫星轨道参数之间的相关性。结果表明:
(1) BDS-3地心运动时间序列X、Y和Z方向STD分别为6.7、6.9和23.4 mm。频谱分析发现BDS-3地心运动Z方向奇数谐波的交点年信号比较显著,X和Y方向存在与BDS-3 MEO卫星轨道重复周期有关的7 d信号。
(2) BDS-3地心运动X、Y和Z方向估计误差平均值为2.7、2.8和5.3 mm,并且Z方向估计误差随太阳高度角呈周期性变化,主要周期为1/2、1/4和1/6交点年。
(3) BDS-3地心运动Z方向和光压参数之间的相关性随轨道面空间构型的不同而变化。其中,Z方向与D0、B1c和D2c参数的相关性较强,与B1c相关系数最高可达0.8。
综上所述,BDS-3和GPS地心运动在X和Y方向一致性较好,但Z方向差异较大。为进一步提升BDS-3地心运动质量,关键在于改进太阳光压模型,提高BDS-3卫星精密定轨精度,同时可以适当提高数据处理间隔以减小估计误差,提高地心运动估值的稳定性。
猜你喜欢
空间科学学报(2020年6期)2020-07-21
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
学生导报·东方少年(2019年7期)2019-06-11
数学学习与研究(2017年11期)2017-06-20
学苑创造·A版(2017年4期)2017-05-13
青年时代(2017年3期)2017-02-17
小天使·一年级语数英综合(2015年8期)2015-07-06
小朋友·快乐手工(2015年1期)2015-03-13
科学启蒙(2014年9期)2014-11-12