三维激光扫描在某水电站大坝基础廊道变形监测的应用
2024-01-02 09:07:06吴夏,赵亮
水电站设计 2023年4期
吴 夏,赵 亮
(中国电建集团成都勘测设计研究院有限公司,四川 成都 611130)
0 前 言
水电站大坝基础廊道的安全监测常规手段主要包括外观监测和人工巡视两种方法,当水电站大坝基础廊道出现渗水量、变形量较大等异常情况时,常规外观变形监测手段已难以满足快速、无接触和整体变形的安全监测需求。
随着测绘科技的快速进步,数字化实景监测成为一种趋势,如:陶传达、聂泽栋、张秀才等[1]建筑项目竣工测量中地面激光扫描技术的应用尝试;史秀保、汪帆、葛纪坤[2]三维激光扫描在建筑规划竣工测绘中的应用研究;夏国芳、王晏民[3]三维激光扫描技术在隧道横纵断面测量中的应用研究;王晓昳[4]三维激光扫描在城镇地籍测量中的应用探讨;刘绍堂[5]一种隧道整体变形监测方法及其应用。刘燕萍,程效军,贾东峰[6]基于三维激光扫描的隧道收敛分析。目前,三维激光扫描技术虽然能够快速进行三维点云数据采集与实景复制,但对于应用于变形监测还处于新兴阶段。
本文选取某水电站大坝基础廊道变形作为监测研究应用对象,使用三维激光扫描仪Trimble SX10进行初始三维点云数据采集与实景化复制,通过建立三维数模分析技术,实现从点对点跨越到面与面、体与体的监测,从而能够更有效地监测基础廊道整体的变形趋势,并为进一步研究治理措施提供更为可靠有效的技术支持。
1 工程概况
某水电站水库二期蓄水过程中,大坝坝顶自左岸值班房到右岸发生上下游不均沉降变形,右岸混凝土路面开裂,混凝土板下碾压土石料产生裂缝(长约150 m、宽约10 cm、深约80 cm),并形成错台(高差约80 cm);大坝上游侧防浪墙靠右岸侧出现4处贯穿性裂缝,形成错台;大坝中部及左岸侧防浪墙有挤压破坏。左岸值班房向上游倾斜,最大倾角约6°,室内地面变形沉降。
当库水位上升至一定高程以上时,大坝变形和渗漏量等明显偏大,坝顶呈向下游的弧线变形,大坝下游2 500 m高程三个观测房均出现渗水情况,2012—2017年度期间大坝外部变形测得最大沉降速率达184 mm/月,并出现大范围纵向裂缝和最大超过50 cm的错台,坝后坡出现多处凹凸变形和网格梁拱起折断。并且,大坝右岸EL2475灌浆平洞K0+257 m桩号和K0+283 m桩号上游顶拱有渗水现象,基础廊道新增部位下右侧廊道壁竖直墙与顶拱交接部位出现表层起壳现象,墙壁下部中间出现裂缝,长约5 m,宽约1 cm,裂缝处有水渗出,在后期巡视检查中发现裂缝逐步增大加长。为确保大坝运行安全,经多方研究,采用了快速、无接触的三维激光扫描技术进行大坝基础廊道内部整体变形监测的应研究,并以期为后续治理措施提供技术支持。
本次应用研究采用的仪器是Trimble SX10三维激光扫描仪,数据处理软件主要为Trimble Business Center(TBC)和Trimble RealWorks(TRW)软件,整个工作流程主要包括外业数据采集、数据预处理、三角网模型建立、隧道断面截取、成果输出、对比分析等。外业数据采集中,需设置合适的分辨率与扫描方式进行扫描,并根据现场环境复杂度以及仪器本身有效工作范围的不同,合理设计测站长度和标靶物的摆放位置。
2 三维激光扫描仪基本原理与特点
2.1 基本原理
三维激光扫描仪由软件、硬件及连接线组成,软件为后处理点云软件,硬件为扫描仪、外(内)置照相机、手簿、基座及脚架等。三维激光扫描仪发射脉冲信号,并同路径返回来,接收器接收到信号后,能够快速的计算出扫描仪到物体的距离。编码器同时记录此时的扫描仪的横向角度和纵向角度,通过三角关系式,有距离和角度就能算出被测物体的三维坐标(如图1所示)。

图1 三维激光扫描基本原理
图1中P点坐标的计算公式为:
式中:α为横向扫描角度;β为纵向扫描角度;D为扫描距离;P为待测点。
2.2 主要特点
三维激光扫描技术系近年来出现的新技术,在国内越来越引起相关领域的关注。它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据。可以快速、大量地采集空间点位信息,为快速建立物体的三维影像模型提供了一种全新的技术手段,其具有如下主要特点及优势。
(1)非接触性。传统测量大部分需要人为放置棱镜,有些地方人无法到达时就不能准确测量出所需要的坐标。三维激光扫描仪可通过非接触式的方法获取变形体的三维坐标,进而完成变形体的监测分析。
(2)“三高”。采样速度高、精度高、分辨率高,毫米级点位精度与高密度的点云间距保证了监测成果的可靠性。
(3)数据采集速度快。三维激光扫描仪可以短时间内采集大量的点云数据。
(4)全数字化采集。测量数据以点云坐标数据显示。
(5)包含全站仪测量模式与外置相机。三维激光扫描仪可以通过内置的全站仪功能完成设站,扫描时即可将采集数据附和至监测控制网中。另外,测量时可以通过相机照射全景影像,方便后期建模处理。
(6)数据三维效果。采用三维激光扫描仪扫出来的数据,可直接获得三维效果,方便后期人员的设计与应用。
(7)激光穿透性好。三维激光扫描仪扫描具有良好的穿透能力,能够获取物体表面的信息特征。
2.3 点云数据处理方法
对基于三维激光扫描技术的廊道监测而言,首先需要对扫描成果进行常规点云数据处理,一般采用与扫描设备配套的专用点云软件进行,步骤如下。
(1)数据预处理:包括着色、格式转换、点云裁剪等步骤,主要是为了裁剪掉与变形分析无关的点云及粗差点。
(2)拼接配准:通过公共点将不同扫描站的点云数据匹配至同一坐标参考系统中,过程中应注意控制配准误差。
(3)点云分类:使用点云自动分类算法剔除植被、输电线、建筑等与变形分析无关的点云,对于自动分类方法无法识别的地物点还应通过人工分类进行剔除,最后仅保留廊道边墙顶拱数据。
(4)去噪滤波:剔除噪点及粗差点。
(5)曲面拟合及编辑:以廊道基点点云为基础拟合三维曲面,输出至监测分析软件提取廊道形变信息。
由于激光扫描存在扫描死角,输出的曲面模型必然会存在局部失真的情况,对于失真部位的监测分析成果可靠性较低,因此在后续变形成果提取中应选择单独的“监测块”,由其直接计算变形。
传统单点监测模式中,以多次测量待定点的坐标获取该点的位移量,但三维激光扫描技术使用的是无合作目标的测量模式,每次扫描所得点与点之间都不重合,故而无法通过测量同名点坐标的方式来获取变形量。因此,需要通过多角度、高密度的方式扫描廊道,尽可能全面地将廊道表面数据从实地“实景复制”到点云上,以多期三维曲面模型检测对比的方式测取廊道变形量。
3 工程实例
由于本次监测分析缺少竣工测量相关数据,无法剔除施工因素的干扰,但三维激光扫描成果基本能反映廊道变形情况,变形量级可做参考。后续可以通过对廊道定期进行三维激光扫描来获取变形发展趋势,为工程治理提供技术支持。
3.1 数据采集
利用三维激光扫描技术在一定时间间隔采集基础廊道的两期三维点云数据,通过不同时间段空间信息的对比分析,监测基础廊道在该时段内三维变形时空演化规律,结合现场常规监测数据,判断基础廊道在此时间段内的变形发展情况。
基础廊道累计采集两期数据,数据采集时间为2021年2月24日与2021年4月13日。初次扫描采集基础廊道基准值,且此次数据可作为进场前基础廊道三维变形分析原始数据,但由于扫描期间廊道积水和以往施工废料未清理,对扫描数据质量造成了一些不利影响,并且初次扫描期间基础廊道照明设施损坏,所获点云数据无法着色。
二次扫描时,所采集数据可同初次扫描数据进行三维监测,分析基础廊道在此期间的位移变形情况,也可将其与基础廊道设计体型相对比,分析基础廊道实测值与设计值之间的差异情况。二次扫描期间,施工队伍已进场,基础廊道内增加了照明设施,可获取基础廊道真彩色点云数据,所建模型可附着彩色照片。
基础廊道两次扫描数据均为自由设站扫描,最终数据以右岸灌浆平硐(稳定状态)为参考配准各站扫描数据。
3.2 监测成果
本次某水电站基础廊道扫描间隔为49 d,一期数据于2021年2月24日完成;二期数据于2021年4月13日采集。三维点云数据外业采集过程中均通过精密控制测量相关要求架设扫描仪,通过数据分析,结果显示两期扫描数据空间位置匹配良好,数据精度高,满足廊道三维变形监测分析要求。两期点云数据时间跨度较小,但受到施工队伍进场作业的影响,廊道内部新增许多干扰物体,例如照明设备、保护管、电缆、各类标识物等,因此需要对两期点云进行平滑去噪,剔除干扰数据,仅保留廊道表面点云,使用廊道表面点云构建的三角网模型(见图2)。
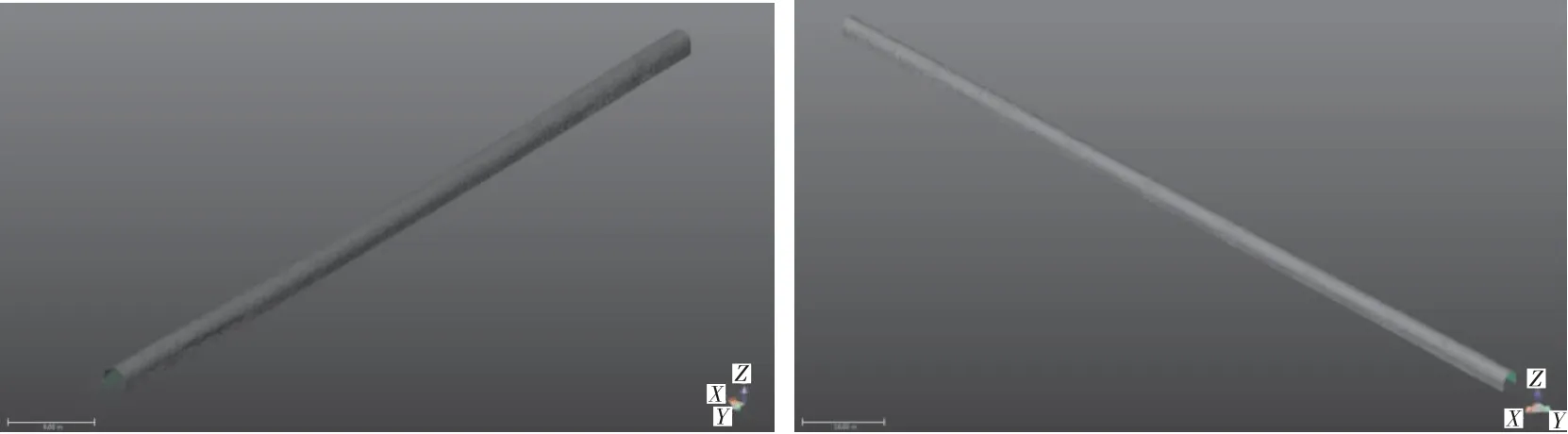
图2 两期廊道三角网模型
对建立的三角网模型进行精细化处理,选择适当的投影面,采用空间差值算法计算出廊道前后两期数据在此间隔时间内的变形值,其所得三维监测如图3~4所示。

图3 廊道三维监测成果俯视示意
在图3和图4中,淡蓝色区域(未框出区域)为稳定区域,变形很小;暖色调区域(框出区域)为黄色、红色,表示变形值为正;蓝色、深蓝色区域表示变形值为负。通过对三维监测图分析可知,整个廊道在两次扫描时间段内整体未出现大幅度变形情况,中部下游边墙存在大约1 cm的收敛变形。局部显示变形区(黄色、红色区域)是由于廊道施工扰动所带来的观测误差,不代表廊道真实变形情况。因此此观测期内基础廊道整体基本处于稳定状态,未出现较大变形情况。

图4 廊道三维监测成果轴测示意
引用图5和图6可知:由于此次三维激光扫描时间间隔较短,廊道总体处于基本稳定状态,监测云图中的个别变形异常区域是由于现场施工干扰所带来的观测误差,不代表廊道真实变形情况。但值得注意的是,从整体分析而言,廊道中部下游边墙存在少量收敛变形(约1 cm),后续监测中应重点关注此部位变形情况。

图5 局部扫描变形异常区1
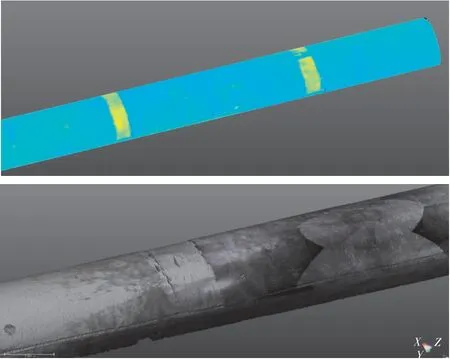
图6 局部扫描变形异常区2
3.3 精度控制
对于不同于测图、体型测绘、土方测量等应用,基于三维激光扫描技术的廊道变形监测对精度有较高要求,因此需要进行误差分析和精度控制。与传统测量方式类似,三维激光扫描技术的误差主要来源是外业误差(设备误差、环境误差及基准误差等)和计算误差,对于变形监测应用而言还存在着监测分析误差等。本文列出以下几种方法来减小误差加强精度:
(1)设备误差可通过观测时缩短扫描距离、降低垂直角大小、选用高性能扫描仪等方式削弱。
(2)环境误差一般可通过选取适宜观测时段、避开障碍物、点云去噪等方式削弱。
(3)基准误差可通过每年定期复测基准值进行稳定性复核,具备良好的精度、可靠性与长期稳定性,将其作为三维激光扫描变形监测的基准可以很好消除基准误差带来的影响。
(4)本文计算方法误差采用基于表面模型的变形计算方法来获取廊道位移量,该方法利用高密度点云拟合三维曲面,利用曲面连续不间断的特性,能以更高精度完成廊道变形监测,反映廊道整体的形变状况。
(5)被测物体表面误差可通过选取适宜架站位置、多期数据滤波等方式削弱影响。
4 结 论
通过大坝基础廊道三维体型、二维断面等监测成果,可判断与设计体型相比,基础廊道实测体型已发生较大改变,变形主要集中在廊道中部的沉降变形和边墙的收敛、膨胀变形。对于廊道中部的沉降变形而言,越靠近廊道中部区域变形量越大,变形量最大可达18 cm左右;基础廊道上游边墙变形量较小,约在1~2 cm之间,主要表现为向下游位移,其中靠近廊道顶部的边墙变形量相对较大;基础廊道下游边墙在桩号K0+115 m至K0+145 m之间存在3~5 cm的膨胀变形,在桩号K0+185 m附近存在最大约6 cm的收敛变形,且在靠近廊道顶部的边墙存在变形,其他区域基本处于稳定状态。
综上所述,将三维激光扫描技术应用于大坝基础廊道三维变形监测,可获得任意关注区域空间点的三维位置及变形量,灵活高效地建立多个分析断面,这突破了传统外观变形监测的诸多限制,监测结果可以更好地反映整个被监测对象不同位置的形变量级,并为综合分析廊道的整体稳定性和研究治理措施提供可靠的技术支持。
猜你喜欢
社会科学战线(2022年6期)2022-08-25 09:26:56
资源导刊(2020年5期)2020-06-12 11:36:58
百科知识(2018年6期)2018-04-03 15:43:54
西部大开发(2017年7期)2017-06-26 03:13:56
少儿科学周刊·儿童版(2016年4期)2017-02-08 13:49:11
少儿科学周刊·儿童版(2016年4期)2017-02-08 13:48:12
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
城市道桥与防洪(2014年1期)2014-02-27 07:24:34
中国三峡(2013年11期)2013-11-21 10:39:18