小型仿人型跑步机器人设计与研究
2024-01-01 00:00:00吕斌李发海
客联 2024年4期



摘 要:随着人工智能和机器人技术的不断发展,仿人型机器人在各个领域展现出广阔的应用前景。跑步作为一种常见的运动方式,对人体健康具有重要意义。本论文旨在基于树莓派4B设计和研究一种小型仿人型跑步机器人,通过模拟人体的运动方式和步态,实现高效的跑步功能。将从机械结构设计、传感器系统、运动控制算法以及人机交互等方面展开研究,以期为小型仿人型跑步机器人的设计和开发提供理论和技术支持。
关键词:跑步机器人;树莓派4B;传感器系统;运动控制算法
中图分类号:TP393" " " 文献标识码: A
一、引言
移动机器人的研究始于上个世纪中期。随着传感器系统的嵌入式系统的广泛应用,仿人机器人比赛的举行,跑步机器人也成为了研究热点。小型仿人型跑步机器人在设计时,应当遵循结构紧凑、运动灵活、稳定性好、易于控制的原则。对此,我们需要深入研究人体的生理结构和运动机理,并将其融入到机器人的设计中。
二、系统设计
小型跑步机器人的系统结构主要由树莓派4B、加速度传感器、舵机系统组成。对于跑步机器人而言,树莓派4B提供中心整体控制,加速度传感器与舵机系统辅助配合,共同完成小型仿人跑步机器人的设计与开发。机器人共有2条腿,每条腿有5个舵机,机器人总共有18个舵机,即机器人每条腿上有5个自由度,全身共8个自由度。机器人剩余部位按照实际需求进行安装。
三、硬件设计
(一)控制器设计方案
控制器系统以树莓派4B为核心处理器,搭配WIFI模块,使计算机与跑步机器人处于同一局域网下,在此基础上完成行走、奔跑、跨栏等相关动作。该控制器将负责接收指令、处理数据、驱动电机等任务,以实现机器人的运动控制。
树莓派4B:作为主控制器,处理指令、数据计算和电机驱动等功能。
加速度传感器:用于驱动机器人的舵机系统,接收来自控制器的信号,实现机器人的运动。
舵机系统:通过主控制器进行对应的动作,实现机器人的运动。主要流程如图1所示。
(二)系统模块设计方案
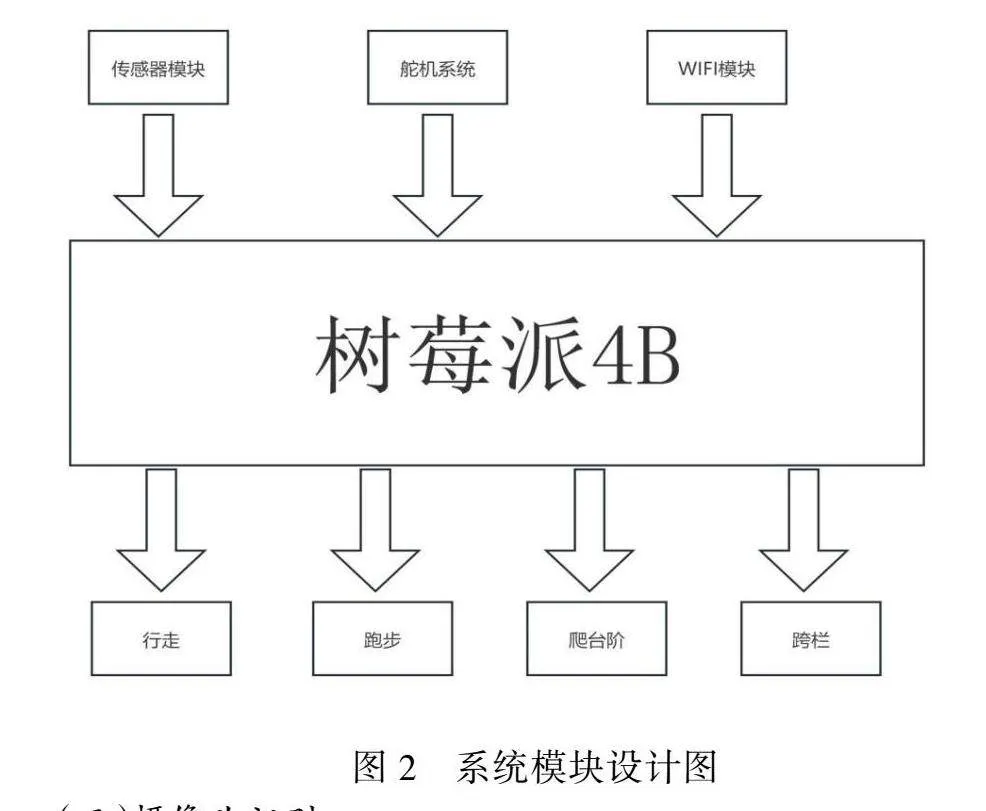
机器人需要在WIFI模块的控制下,根据比赛环境的不同,进行相应的跑步动作。主要有行走,跑步,爬台阶,跨栏。通过树莓派4B控制板进行WIFI模块、加速度传感器等相关硬件配置,接受PC端发送的指令信息,控制舵机系统的运行,完成仿人成机器人某个具体动作的实现。系统模块设计图如图2所示。
(三)摄像头识别
机器人采用的舵机为总线式舵机,此种舵机连接方式可以看作是所有的舵机是被一组线串联起来的[1]。利用摄像头识别进行工作的原理:当PC端发出运行指令后,树莓派控制摄像头识别当前所处环境,将所处的赛道信息返还到控制器,进行机器人的下一步运动。[2]
四、软件设计
(一)软件结构
本次项目的研究方向主要为通过现有的知识体系对树莓派4B芯片进行改装,按照机器人比赛相关规则对机器人算法程序编写和优化,对机器人进行硬件和软件的设计以便于更好的完成比赛。使用基于树莓派4B芯片的单片机与传感器、舵机系统组合设计的嵌入式系统的小型仿人跑步机器人,通过WIFI模块在同一局域网中控制机器人执行指令任务,实现大赛要求相关动作。软件系统框架图如图3所示。
(二)多舵机运动控制程序
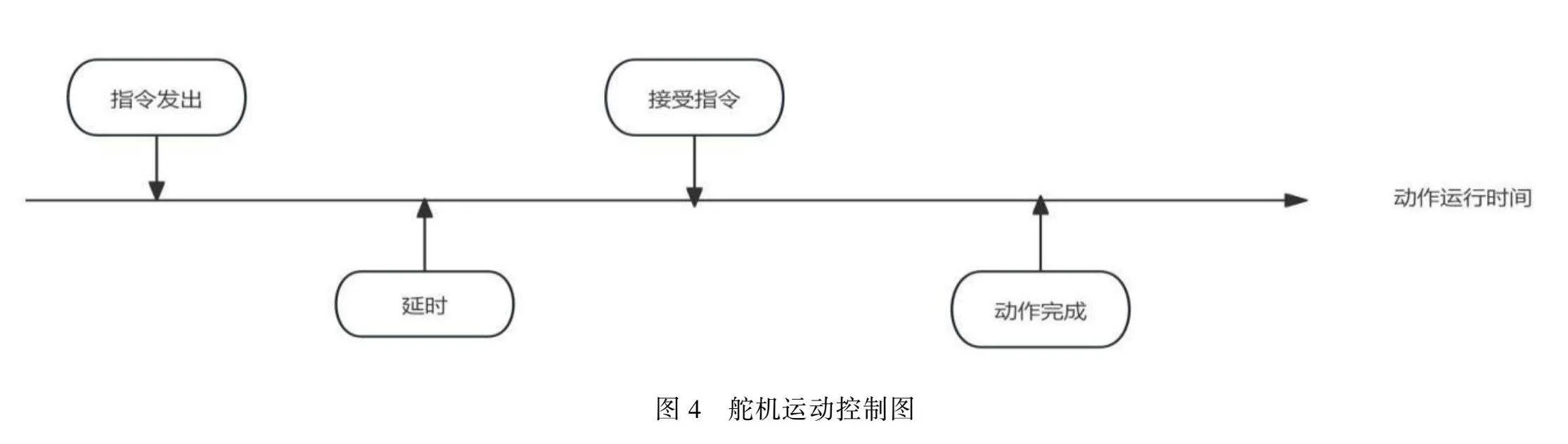
机器人利用多个舵机间的组合运动,完成机器人的指令动作,在控制机器人实现相关比赛动作的同时,控制各个舵机移动到下一指定位置,实现机器人的动作连贯性。通过相应的代码指令以及参数设置,使得机器人相关动作更好的完成。舵机运动控制图如图4所示,主要代码示意图如图5所示。
(三)程序流程图
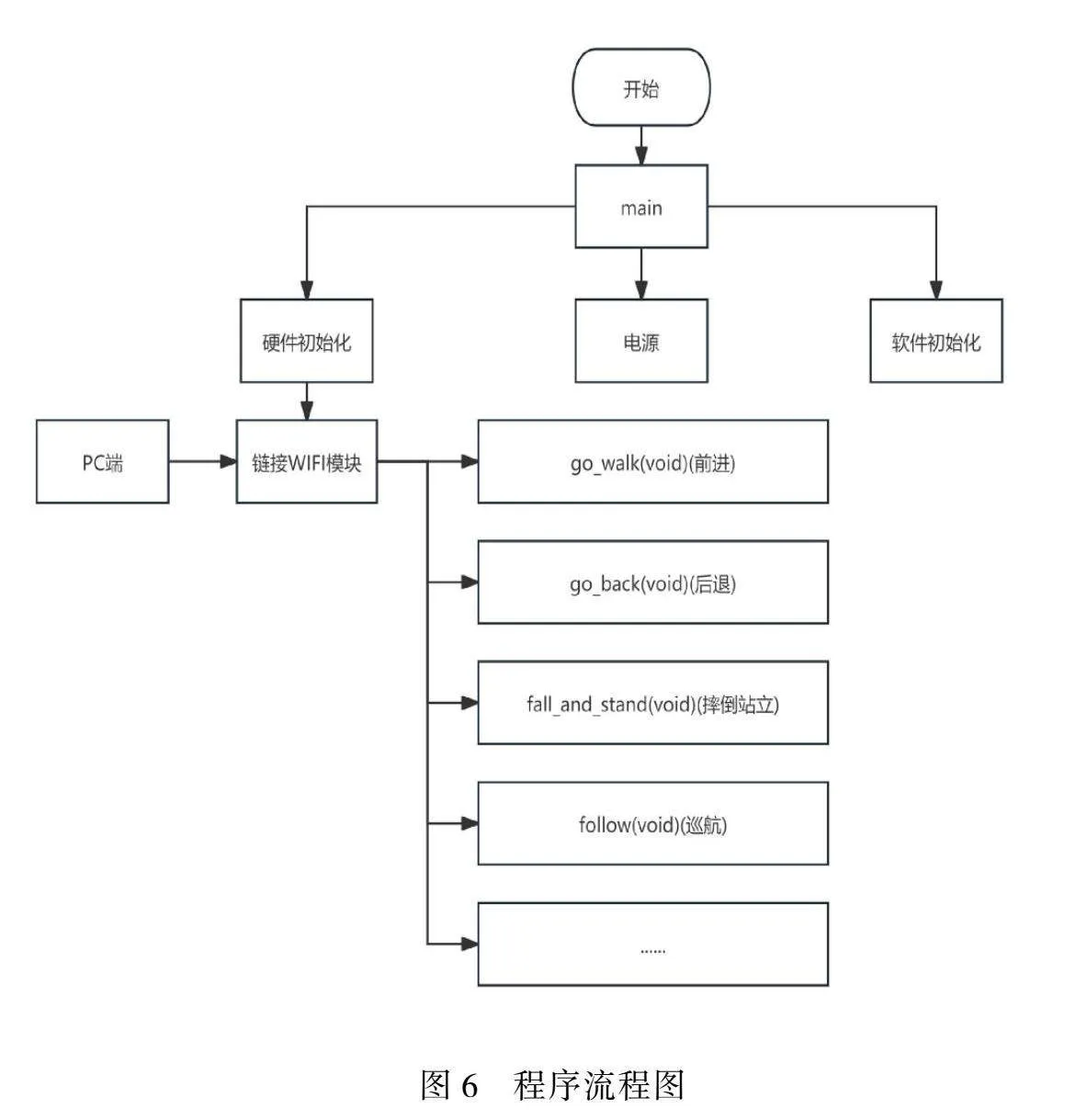
嵌入式系统一般由嵌入式硬件系统和相对应的软件系统结合而成,硬件系统可以接受软件系统发出的执行指令,完成相应的操作和任务,如PC端发出前进的指令后,通过WIFI模块调动相应的舵机,机器人的腿部舵机调节转轴角度做出类人的前行动作。程序流程图如图6所示。
(四)机器安全防护
在机器人的运动过程中,通过软件算法限制机器人的最大速度,防止因速度过快导致的意外伤害。同时在电机驱动过程中,对电机的负载进行监测,防止因过载导致的设备损坏和安全事故。使用传感器判断机器是否摔倒,对传感器设置初始值作为依据,在机器人倒地后可以准确判断并站立。
五、结语
本次项目从开始到最后的完成,主要有以下的几个问题,第一是对硬件舵机系统原理的理解,当控制信号送达舵机时,控制电路会解析信号并确定所需的输出位置,对18个舵机进行同步控制,链接WIFI模块,设置舵机初始值,配置局域网环境等。第二是在软件方面,利用vncviewer和PyCharm软件进行python语言编写,将所写代码嵌入单片机后,使用WIFI控制机器人依靠舵机系统完成相关的指令动作,即为单片机写入合理的程序,使机器人按照要求完成比赛。第三是在其它方向,例如机器人的材料,既要保证所使用的材料有足够的强度作为机器人的主体框架,也要确保其稳定性可以适应多种比赛环境以及复杂的舵机动作,确保在任何情况下可以完成比赛。
参考文献:
[1]苏青. 多机器人路径规划与协同避碰研究[D].南京邮电大学,2015.
[2]卢嫚,谢磊鑫.基于OpenCV智能车牌及颜色识别[J].自动化与仪表,2023,38(08):120-124.DOI:10.19557/j.cnki.1001-9944.2023.08.025.