可控电感在WPT系统动态性能的优化方法
2024-01-01 00:00:00凌荣光何磊杰刘巧孟繁超叶佳青唐春森
重庆大学学报 2024年6期

















摘要:SS型Buck-WPT(Buck-wireless power transfer)系统由Buck电路和基本的SS型无线电能传输电路组成。该电路系统因为结构和控制方式简单、控制效果明显等优点在感应式无线电能传输方面得到广泛应用。但该电路的动态特性并不能满足一些时变系统对快速性的较高要求。例如,系统在启动时会存在较强震荡和较大超调,系统负载改变时稳定状态会发生改变且存在明显抖动,系统极限空载时原边谐振电流会增大,且该电流值远超出安全工作范围。本文提出了一种基于可控电感的SS型 Buck-WPT系统。首先,分析了电感值可调的方法并在COMSOL中建立仿真模型验证其电感值可控的特性。其次,对SS型Buck-WPT系统进行数学建模,将SS型WPT系统作为Buck电路的特殊负载,推导SS型Buck-WPT系统状态空间方程。研究其三维空间内相轨迹的降维描述方法,将该系统用二维相轨迹描述系统运行过程。然后,通过分析启动阶段相轨迹运行规律,改进前级Buck电路。将传统Buck电路中的电感换成可控电感,运用其电感值可调的控制系统开通阶段的运行轨迹,使系统在1个开关周期内无超调快速进入稳态。当系统负载改变时,系统的输出电压会改变,且是不断抖动来回反复的过程,利用PI算法对系统进行恒流控制。通过可控电感控制系统相轨迹,使副边输出能无抖动快速进入稳态,保证输出电压不变。针对SS型谐振网络的Buck-WPT系统中出现空载大电流的问题,提出了将可控电感串联接入原边谐振网络的方法。实时检测原边谐振电流值,该值超过正常工作范围,感值就快速增大,减小原边谐振电流,达到空载时维持原边谐振电流安全值以下。最后,验证上述方法在优化SS型Buck-WPT系统动态特性的有效性,在Simulink中搭建仿真电路。该方法能减小工作条件改变时带来的系统抖动,且在不改变系统响应速度前提下减小超调,优化系统动态性能,增强系统抗负载扰动力,提高系统带负载能力有明显效果。
关键词:无线电能传输;动态性能优化;可控电感;相轨迹规划
中图分类号:TM743 " " " " "文献标志码:A " " "文章编号:1000-582X(2024)06-103-15
Dynamic performance optimization method of WPT system based on controllable inductor
LING Rongguang1, HE Leijie1, LIU Qiao2, MENG Fanchao2, YE Jiaqing1, TANG Chunsen2
(1. State Grid Ningbo Electric Power Supply Company,Ningbo 315000,Zhejiang, P. R. China; 2. College of Automation,Chongqing University,Chongqing 400044, P. R. China)
Abstract: The SS Buck-WPT system, comprised of a buck converter and a basic SS-type wireless power transfer circuit, has gained widespread adoption in inductive wireless power transmission due to its structural superiority, control methods, and effectiveness. However, this system fails to meet the responsiveness requirements of time-varying systems due to its poor dynamic characteristics. In practical applications, it exhibits significant overshoot and oscillation during startup, instability when subjected to varying load resistances, and sharp fluctuations in primary resonance current under light conditions. To address those dynamic challenges, this paper proposes a SS-type Buck-WPT system based on controllable inductance. Firstly, controllable inductance was thoroughly analyzed to understand the principle of adjustable inductance, and then modeled in COMSOL to verify the findings. Mathematical modeling analysis of the SS Buck-WPT system was conducted, with the system state space equation derived by considering the SS WPT system as the load of the buck converter. The system was described using two-dimensional phase trajectories to simplify the analysis. A phase trajectory operation law during start-up was proposed, and the pre-buck circuit was improved by replacing the conventional inductor with a controllable one, allowing for stable operation with minimal overshoot during startup. The PI algorithm was used to maintain constant current despite load changes, ensuring expected phase trajectory behavior and rapid return to steady-state operation with real-time control of inductance. Excessive primary resonant current was mitigated by cascading the controlled inductance with the SS in the primary circuit, adjusting the inductance automatically to keep current within permissible values. To validate the proposed method, a prototype was implemented in Simulink. Results show that this strategy significantly improves system dynamic performance and tolerance to varying loads compared to traditional methods.
Keywords: wireless power transfer; dynamic performance optimization; controllable inductor; phase trajectory planning
无线电能传输 (wireless power transfer,WPT) 技术实现了电能的无导线传输,大大提高用电设备充电的快速性、安全性。为提高WPT系统的实用性,功率调节必不可少。目前,主要调节方式大致有以下3种:1)通过对谐振网络参数的优化,使系统保持谐振改变输出电压 [1⁃2]。这种方法功率调节范围宽,但控制精度较低、成本高。2)通过移相控制,改变整流器或逆变器控制信号的脉宽和移相角,间接调节系统等效阻抗[3⁃6]。该控制方法简单,但易引起系统谐振波形失调。3)增加 DC/DC 电路[7⁃12]。通过控制开关管的导通角改变输出电压。该方法虽然在一定程度上提高了系统的复杂性,但控制方式简单,功率调节范围大、效果明显。当然在实际应用中,也有将几种方式混合使用。文献[13]是基于模糊控制理论对原边逆变器进行移相控制,并对副边DC/DC电路进行占空比控制,使输入功率最小化和输出电压恒定。SS Buck-WPT便是前级Buck变换器与后级WPT系统串联而成的高阶系统,系统动态性能的优劣在很大程度上受Buck电路影响。
对于无线电能传输系统,往往关注传输功率、传输效率等稳态特性指标。在其动态特性优化上,文献[14]和文献[15]分析了前级DC/DC电路与后级WPT系统的小信号阻抗特性,提出一种控制方法来调节系统阻抗,提高系统的动态特性。另外,为了优化WPT系统的动态特性,一些学者优化了WPT系统的控制方式。文献[16]和文献[17]分别采用单周期控制与比例微分控制相结合的控制策略和采用多目标遗传算法优化PID控制器设计。但这些控制方法复杂,应用范围有限。
笔者针对SS Buck-WPT电路在实际应用过程中的动态特性问题,利用可控电感在控制信号作用下连续可调的特性,提高SS Buck-WPT电路的动态特性、抗负载扰动能力以及带负载能力。与普通电感相比,可控电感值在一定范围内随控制信号的变化而改变。目前,已有相关文献将可控电感应用到WPT领域。文献[18] 设计了一种电感值可控的原边电能发射线圈,让系统即使在不同负载下也能保证系统工作的最大效率。文献[19] 将可调电感分别串入原副边谐振网络中,当系统因参数漂移影响传输效率时,动态调节电感值,使WPT系统的谐振参数处于最合适状态。文献[20]将可控电感串入副边电路,当系统因参数漂移导致失谐时,可根据相位差动态调整电感值,使系统恢复谐振。文献[21]设计了一种可变的谐振器,文献[22]通过与可变电感电路的附加一匝线圈的电感耦合,控制有效电抗来调节谐振,保证系统在不同负载条件下的传输效率,增加软开关范围。
本文首先介绍了可控电感的工作原理,并在COMSOL中验证了其电感值的可调特性。详细分析了系统在各个条件下的工作特性,提出优化办法。利用可控电感,在不牺牲系统响应速度的前提下,使系统在启动时无过冲快速达到稳定状态。同时,降低负载改变时的系统抖动,减小轻载的原边谐振电流,提高系统带载能力和抗负载扰动能力。最后,通过Simulink搭建电路仿真,验证该方法在优化系统动态性能上的效果。
1 可控电感
可控电感具有电感值可控的特性,由两部分线圈与磁芯组成,两部分线圈分别受直流电和交流电同时作用。如图1所示,图中两侧线圈ND为直流绕组或称控制绕组,中间线圈Na为交流绕组或称工作绕组。可控电感在不同交流和直流输入情况下,磁芯的磁化情况有所不同。用磁化曲线簇表示具体磁化过程,如图 2所示。横坐标Ha为交流磁场强度,纵坐标Ba为交流磁感应强度,HD为直流磁场强度。当直流磁场强HD发生变化时,磁芯的磁化曲线会发生变化。
由文献[23]可知,当控制绕组的电流改变时,工作绕组磁场强度与磁感应强度满足如下关系
(H_a/H_amax )^2+(B_a/B_amax )^2=1 。 (1)
由式 (1) 可将工作绕组磁场强度与磁感应强度的关系绘制出来,为椭圆曲线,如图2虚线所示。可控电感的磁场强度Ha与磁感应强度Ba同时满足不同直流输入下的磁芯磁化曲线和公式(1)的关系曲线,它们的交点(Q_0 、Q_1 、Q_2 、Q_3)即可控电感的工作点,磁化曲线的斜率就是工作绕组的电感。因此,在控制绕组流入不同的控制电流i_DC时,可控电感的工作点会改变,相应的磁化曲线斜率随之改变,意味着工作绕组电感值的改变。
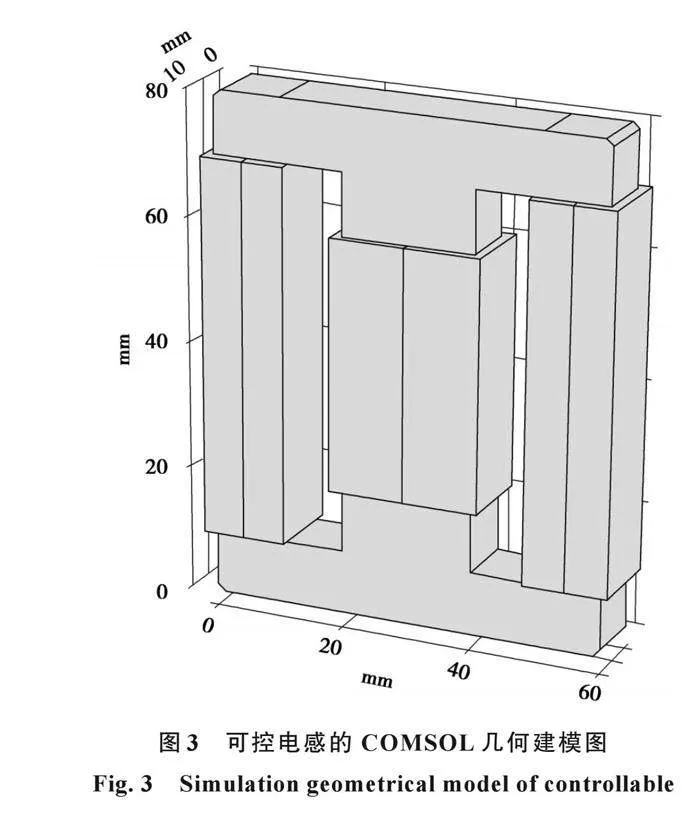
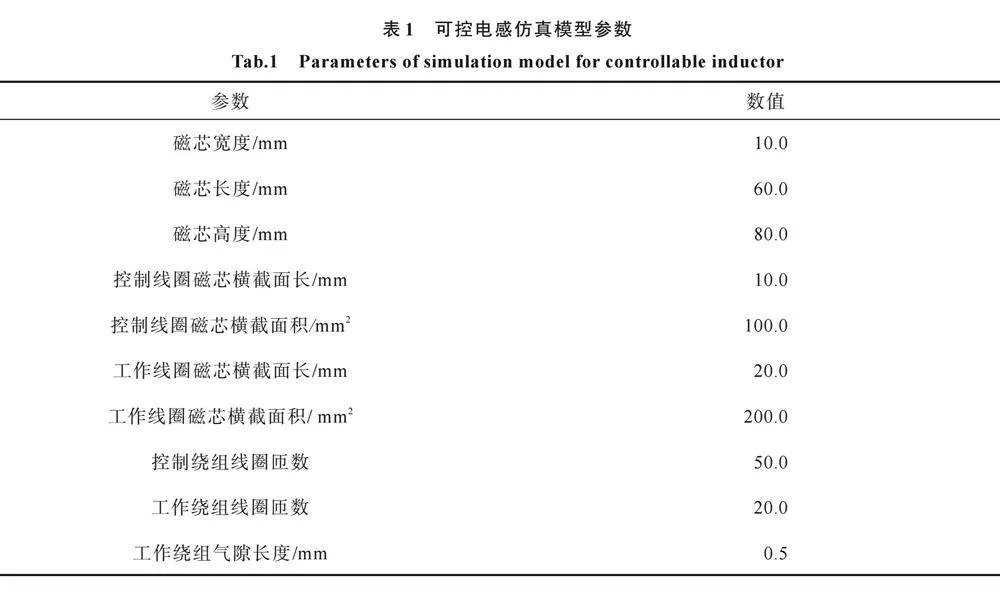
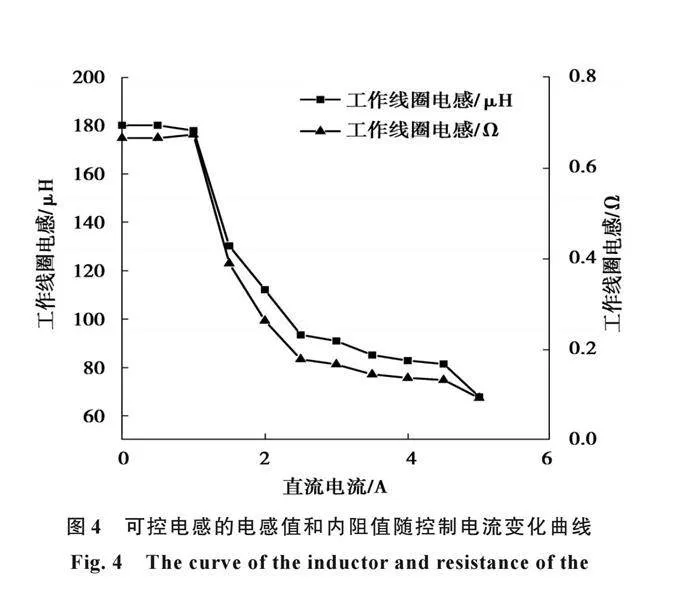
为验证上述理论的正确性,在COMSOL中设计了如图3的可控电感模型,参数如表1所示。其中两侧线圈同向相互对称,为控制绕组,通入直流电;中间的线圈为工作绕组,通入交流电。当工作绕组中交流电电压有效值保持不变,控制绕组中的电流发生变化,电感随之改变。利用COMSOL软件对工作线圈的电感值进行参数化扫描,工作频率=60 kHz。对工作线圈的电感值进行曲线拟合,得到可控电感的电感值变化曲线,如图4所示。从图中可以看出:当控制电流在1~2.5 A间变化时,工作线圈电感变化明显;在2.5~4.5 A间时,电感变化缓慢。但从整体上来说,随着控制线圈中的直流电流增大,工作绕组的电感不断减小。
电感的损耗主要有线圈损耗和磁芯损耗,且随着工作频率增加,线圈损耗会逐渐超过磁芯损耗[24],为电感损耗的主要部分。可控电感的控制绕组流过直流电,内阻很小且和控制绕组长度成正比,控制绕组并不接入系统电路中。因此,工作绕组的损耗是可控电感损耗的主要部分。工作绕组的损耗主要由可控电感线圈的直流电阻和交流电阻导致线圈发热造成。经过COMSOL仿真得到工作绕组工作在60 kHz 、20 A交流电下的可控电感内阻,如图4所示。当i_AC一定时,可控电感内阻的大小变化趋势同电感值一致。即i_DC在一定范围内增大时,电感值减小,内阻同样可以看到。可控电感的总损耗就是各个时刻流入工作绕组电流的平方乘以该时刻下工作线圈内阻的总和。
在实际工作中,对不同的Buck-WPT系统,所需的可控电感的体积与电感值调节范围不同,须进行不同设计。由此,在设计可控电感时,磁芯的选择,匝数的多少、气隙的大小都需要根据实际需要进行单独设计。
2 SS型Buck-WPT系统动态特性分析与优化
图5为SS型Buck-WPT系统的电路拓扑图,由Buck变换器与WPT系统串联而成,可将WPT系统视为Buck变换器的特殊负载。E为等效直流源,S为Buck电路的开关管,L为由可控电感替换的续流电感,C1为Buck变换器的电容,D为电力二极管,LP和RP分别为原边线圈的电感及等效内阻,Ls和Rs分别为副边线圈的电感及等效内阻,M为传输线圈的互感值,Cp和Cs为原副边线圈的补偿电容,VT1~VT4为全桥逆变器的开关管,D1~D4为整流桥的电力二极管,R为负载,是纯电阻。
2.1 Buck-WPT系统开通和关断过程相轨迹分析
将图5的Buck-WPT系统化为三阶等效电路[25]如图6所示,将后级WPT电路等效为一个电感L_eq与一个电阻的串联R_eq结构。
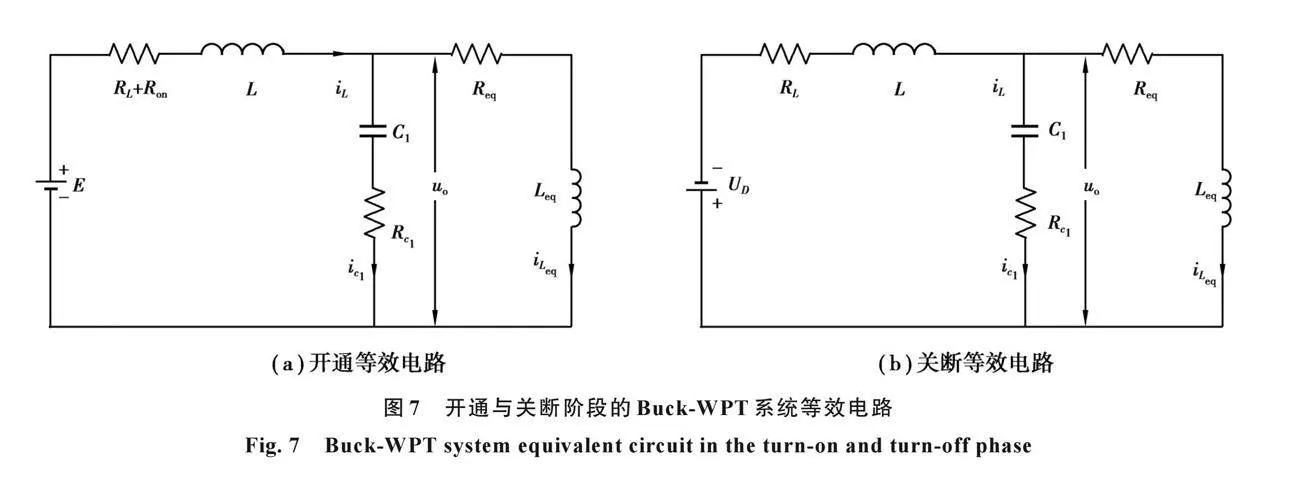
为建立上述等效电路模型的状态方程,对上述电路仍按照开通阶段及关断阶段2种情况进行分析,其等效电路如图7所示。
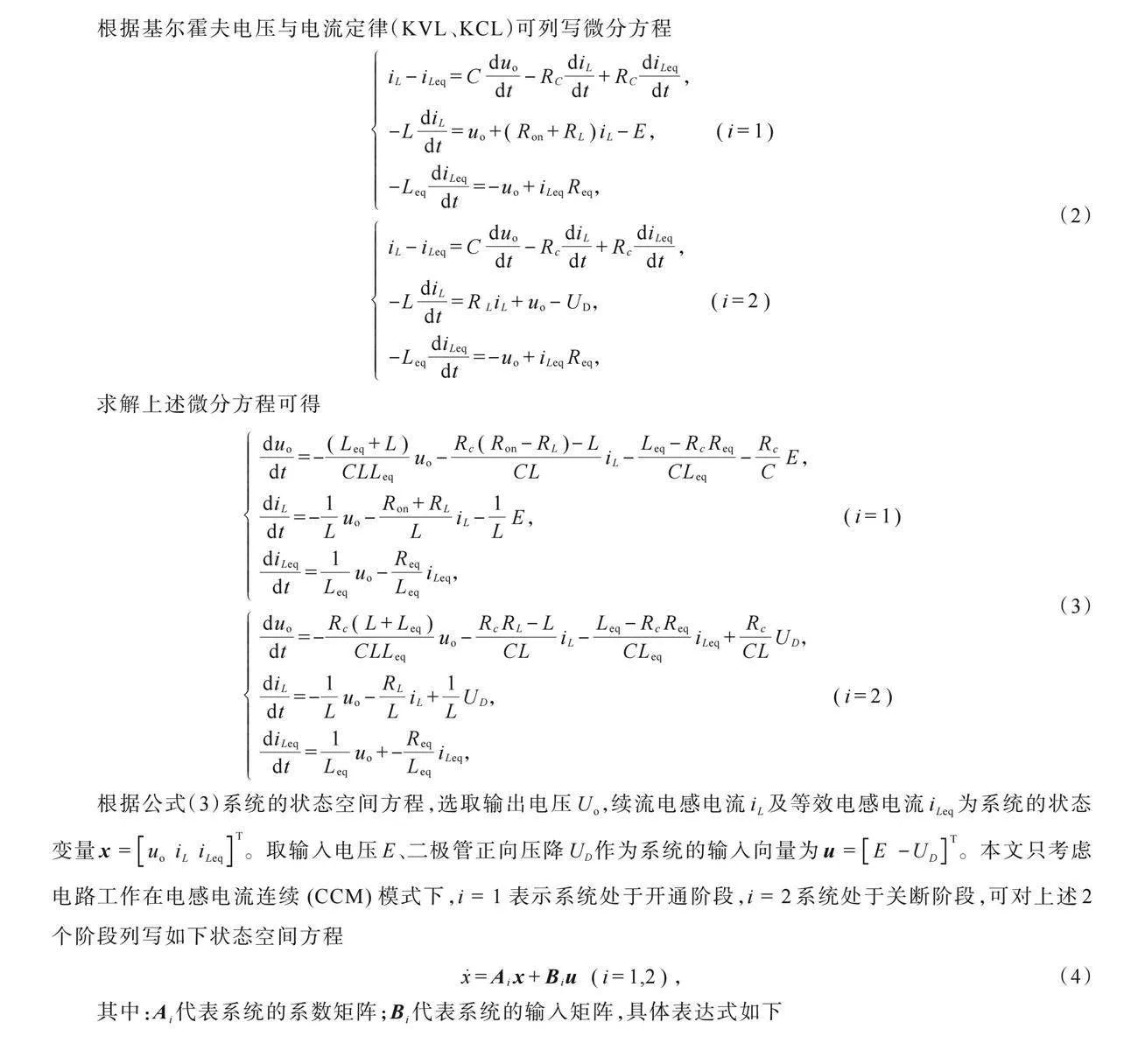
根据基尔霍夫电压与电流定律(KVL、KCL)可列写微分方程
图 8为降维后开通与关断轨迹示意图,系统从初始零状态启动,沿着轨迹l1运行,l1轨迹可以由公式(6) 进行绘制。同理,根据系统的稳态参考点x_ref (u_(o,ref),i_(c_1,ref)),则可由公式(8)反向绘制出系统的关断轨迹l2。2轨迹交点就是最优时间下的切换点x_sw (u_sw,i_sw)。以Buck变换器的目标平均输出电压值、目标电感电流值以及允许的纹波值为条件,找到稳态时的极限环形状和位置,得到稳定状态下的关断轨迹。
由于成本的限制,一般不会在Buck变换器的输出端再添加电流传感器。且后级逆变电路会使i_(C_1 )含有高频交流成分,这将大大增加控制难度。可见,将i_(C_1 )作为控制的输入变量是不合理的。故而,采用前级Buck电路的输出电容电压(u_(c_1 ))和电感电流(i_L)组成相平面,进行相轨迹分析。稳态点记为x_ref (u_ref,i_ref),如图9所示。
在系统的开通阶段,由于此时系统处于工作最恶劣状态,电感两端的电势差处于最大状态。由电感储能公式可知,续流电感L增大,系统的电感电流i_L上升率会减小。因此,在系统开通阶段,需要利用大电感吸收最大波峰情况下的电能,减小系统在开通过程中的冲击,降低系统在开通过程中出现的电压和电流超调。后期开关管处于不断开通关断过程,系统不再工作在电势差最大状态,不会出现新的超调。在规划相轨迹时,仍然需要考虑Buck变换器的目标平均输出电压值、目标电感电流以及允许的纹波值。以这些要求为条件,便可找出稳态时Buck变换器最终极限环的形状和位置,得到稳定状态下的开通和关断轨迹。
另外,Buck-WPT系统本身是高阶非线性的,研究尽可能考虑系统的实际参数。对该系统一部分非关键参数进行忽略,同时,也对描述方法进行等效处理。实际电路存在许多不理想因素,所以在实际控制中,往往会出现小的波动才能进入稳态。
2.2 SS 型 Buck-WPT系统负载切换相轨迹分析
实际工作中,负载改变时常发生,系统的稳定状态会受到影响。针对切换负载后,副边输出电压变化,利用PI算法控制Buck变换器占空比,保持Buck-WPT系统的输出电压恒定。
若副边负载减小,则反射到原边的阻抗会增大,电感电流iL会减小。Buck的输出电压u_(c_1 )抖动会使可控电感的调节变小,如图10所示。原边谐振电流i_p会随着电感电流的减小而减小,根据公式(13)可知,当其他参数为固定值时,副边开路电压Uoc仅由i_p决定。所以副边输出电压会随之减小,导致输出电压无法恒定。因此,需要控制算法来调整系统。
U_oc=jωMi_p 。 (13)
Buck变换器的输出电流与其输出电压及等效负载有关,对于负载变化引起的电流变化,必须通过改变Buck变换器的占空比来调整。当负载切换时,实际电流与参考电流的差值作为控制变量。采用PI控制使电感电流控制在恒定电流状态,调整原边电流i_p使其恒定。在相平面中,其运动轨迹如图11所示。
2.3 SS 型 Buck-WPT系统空载电路动态特性分析
如图 5 中的SS 谐振网络的等效电路图如图 12 所示。V_ab为经过逆变桥后的交流电压,R_p为原边线圈内阻,R_s为副边线圈内阻,Z为等效负载。设原边回路中的电流为I_p,副边回路中的电流为I_s,根据基尔霍夫电压定律(KVL)可列写2个回路方程如下
{(U_ab=[jωL_p+1/(jωC_p )+R_p ] I_p+jωMI_s@ "0 "=[jωL_s+1/(jωC_s )+Z+R_s ] I_s+jωMI_p )┤ , (14)
当系统工作在谐振频率时,根据串联谐振(SS)理论,可得其谐振频率为
ω=1/√(L_p C_p )=1/√(L_s C_s ) 。 (15)
可以解得系统的输入阻抗为
Z_in=V_ab/I_p =R_p+(ω^2 M^2)/(Z+R_s ) 。 (16)
则副边反射到原边的等效阻抗即反射阻抗是
Z_re=(ω^2 M^2)/(Z+R_s ) 。 (17)
综上所述,SS型WPT系统的原边电流为
I_p=V_ab/(Z_re+R_p ) 。 (18)
当 WPT 系统的负载由正常工作状态切换到轻载状态,即当等效负载Z从正常工作数值突然变到无穷大时,反射阻抗Z_re的值会很小。在这种条件下,负载系统原边的电流i_p将会主要由逆变电压输出V_ab 和原边线圈内阻R_p决定。在系统输入的直流电压保持不变条件下,由于原边线圈内阻R_p特别小,i_p会变得很大。该电流过大,系统不能正常工作,存在很大安全隐患。
为解决这类问题,优化系统适应负载突变的能力,考虑和原边谐振电容串联一个可变电感L_r。当系统正常工作时,控制可变电感的电感值为0,此时,它相当于一根导线。当系统突然由正常工作变为轻载工作,可变电感增大电感值。此时,原边谐振电流i_p可表示为
I_p=V_ab/(Z_re+R_p+jwL_r ) , (19)
由公式(19)可以得出,L_r增大会使原边谐振电流i_p减小,使i_p工作在正常范围。
3 仿真分析
3.1 仿真模型搭建
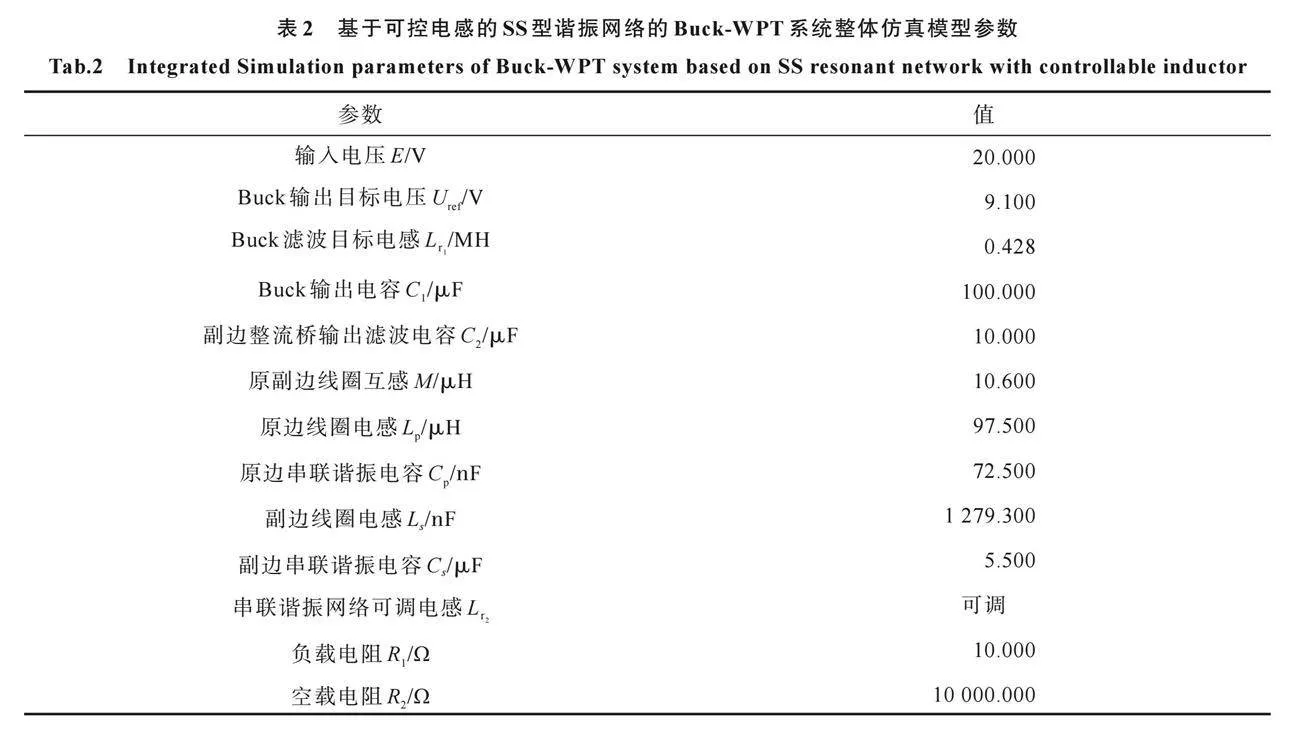
为验证上述分析,在Simulink中搭建了如图13所示的电路仿真模型,电路模型参数如表2 所示。其中,逆变器开关频率为60 kHz,Buck电路在启动时的一个开关周期内达到稳定,之后开关频率=40 kHz。系统在t=0 ms的时候启动;在t=30 ms系统负载由10 Ω突变为6.6 Ω;在t=50 ms系统负载由10 Ω突变为10 kΩ的轻载状态。具体的控制过程如图14所示。
当系统启动时,闭合前级 Buck 电路开关管,在系统达到稳定后使开关管驱动信号频率=40 kHz、占空比=50%。在此期间,动态调整L_(r_1 )的值,使前级Buck电路的相轨迹按照预设路径运行。当系统负载值突然变化时,动态调整L_(r_1 )减小系统抖动,并通过PI调节占空比以保证系统输出电压恒定。当系统负载变为轻载时,原边谐振电流过大。此时,控制器的目标是减小原边谐振电流,实时检测系统输出电流,一旦接近0,便动态调节L_(r_2 )。
3.2 仿真结果分析
为更好验证整体所述控制方法的有效性及对动态性能的提升,对可控电感与固定电感控制下的Buck-WPT系统仿真结果进行对比分析。主要从以下3个方面进行分析:
1)启动时系统的动态响应情况对比。为更好体现SS型Buck-WPT系统的动态响应特性,分别从电感电流和电容电压角度、相轨迹的角度以及系统输出电压的角度进行对比阐述。首先,从Buck的电感电流和电容电压角度来看,如图15所示,有可控电感的Buck-WPT系统在启动过程中不断调整L_(r_1 )的值,保证该过程均无过冲。在3 ms时进入稳态,快速性较好。与之相比,电感固定的Buck-WPT系统虽然能在3 ms达到稳定,但存在较明显超调。可见可控电感在系统启动时,能调节系统动态特性,如在减小电感电流和电容电压的超调上效果明显,且不会增加调节时间。
其次,从相轨迹角度来看,对比图16(a)、(b)可见,在可控电感控制下,系统相轨迹沿着直线到达稳态点。在固定电感控制下,系统相轨迹会出现较大超调,进入到系统稳态点之前,会有来回不断靠近的过程。可控电感使系统前级Buck电路相轨迹按照预定轨迹运行,当系统第一次达到稳态后不会来回抖动,相轨迹就稳定在最后稳定点。
最后,从系统输出电压角度看,如图15所示,系统在固定电感控制下,输出电压出现了较大超调。且进入稳态的时间≈6 ms。而在可控电感控制作用下,输出电压无超调直接进入稳态,这个过程≈3 ms,少了回来不断靠近稳定值的过程,说明研究方法实现了使系统快速无超调运行至稳态。
2)负载切换时系统响应情况对比。同理,首先,从Buck的电感电流和电容电压角度来看,如图15所示,当副边负载10 Ω切换为6.6 Ω时,系统的反射阻抗变大导致电感电流减小。同时,不论是电感电流还是电容电压都由于反射阻抗的突然改变反复抖动,影响系统稳定状态。加入可控电感以及相应的控制算法,系统将自动增大Buck开关管占空比保证电感电流不变,电容电压也会增大。在这个过程中,可控电感的值不断调整,电感电流和电容电压反复抖动的情况得到明显改善。另外,切换负载时,Buck变换器的输出电压上升,电感电流也上升。这是因为在副边输出负载变小的同时,副边电路通过的电流也变大,则等效电阻分得的电压会增大。因此,需要适当增大Buck变换器的输出电流保持系统的输出不变。
其次,对比图17(a)(b)可以看出,当负载变换且电感固定时,Buck电路由于反射电阻增大,电感电流总体趋势减小。但减小过程是反复的,经过一定徘徊才会重新进入新稳态。而电容电压虽然总体保持不变,但还存在较为明显的抖动过程。加入可控电感和控制算法后,由于PI控制保证了电感电流的稳定,可控电感的调整使电容电压和电感电流快速稳定上升,按照预定轨迹直接进入新稳态,不存在反复过程。
最后,在图15中,切换负载前,副边负载的输出电压稳定在17 V。在切换负载后,起始阶段,由于原边电流并未调节到稳态值,副边电路其余等效负载分得的输出电压出现了很大压降。在经过PI环节调整电流后,调整时间≈2 ms,输出负载电压稳定在17 V。与固定电感系统相比,可控电感能有效提高系统的快速性和抗干扰性。
3)空载状态下的Buck-WPT系统中,原边谐振电流的变化情况对比切换空载状态时的Buck-WPT系统中原边线圈谐振电流的情况,如图18(a)(b)所示,系统在0.05 s时,将负载切至空载状态。
由图18可以看出,当切换至空载状态下,固定电感控制Buck-WPT系统的原边电流负载值过大。相当于负载断路,反射阻抗极小,原边谐振电流迅速攀升。与之相比,由可控电感控制的Buck-WPT系统的原边电流在增大可控电感值作用下,迅速降至安全电流以下,急速增大的原边谐振电流情况便不存在了。
仿真结果表明,与传统控制器相比,不论是从上升时间、超调量还是调节时间来比较,研究设计的控制方法具有更优的动态性能。在启动过程中,不仅保证系统的快速性,可以在3 ms内到达稳态,也保证了系统可以无超调进入稳定状态。在负载发生突变时,可控电感及其相应的控制算法保证了系统稳定性,提高了系统的抗负载扰动力。在负载为极限状态(空载)时,系统的原边谐振电流快速降至安全限值以下,提升系统的带载能力。
4 结束语
针对 SS 型 Buck-WPT 系统在启动时,前级 Buck电感电流超调过大,负载改变时对系统稳定状态的影响以及变空载时,原边谐振电流过大等动态特性问题。从原理上详细分析了该现象发生的原因,并提出利用可控电感其值可控的特性提高系统的动态特性,在不牺牲调节时间前提下,使系统快速无超调达到稳态,同时采取防止原边谐振电流过大的保护措施。通过 Simulink 仿真,验证了该方法的有效性,对于SS型谐振网络Buck-WPT电路结构的无线充电系统动态性能及带载性能优化具有一定指导意义。
参考文献
[1] "Hsieh Y, Lin Z, Chen M, et al. High-Efficiency wireless power transfer system for electric vehicle applications [J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2017, 64(2): 228.
[2] "苏玉刚,吴学颖,赵鱼名,等.互补对称式LCC谐振网络的电场耦合式无线电能传输系统参数优化[J].电工技术学报,2019,34(14):2874-2883.
Su Y G, Wu X Y, Zhao Y M, et al. Parameter optimization of electric-field coupled wireless power transfer system with complementary symmetric LCC resonant network[J]. Transactions of China Electrotechnical Society,2019,34(14):2874-2883.(in Chinese)
[3] "Mai R K, Liu Y R, Li Y, et al. An active-rectifier-based maximum efficiency tracking method using an additional measurement coil for wireless power transfer[J]. IEEE Transactions on Power Electronics, 2018,33(1):716-728.
[4] "Zhang Y M, Chen S X, Li X, et al. Dual-side phase-shift control of wireless power transfer implemented on primary side based on driving windings[J]. IEEE Transactions on Industrial Electronics, 2021, 68(9): 8999-9002.
[5] "Jiang Y B, Wang L B, Fang J Y, et al. A High-Efficiency ZVS wireless power transfer system for electric vehicle charging with variable angle phase shift control[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021,9(2):2356-2372.
[6] "Xia C Y, Wang W, Chen G P, et al. Robust control for the relay ICPT system under external disturbance and parametric uncertainty[J]. IEEE Transactions on Control Systems Technology, 2017, 25(6): 2168-2175.
[7] "Su M, Liu Z X, Zhu Q, et al. Study of maximum power delivery to movable device in omnidirectional wireless power transfer system[J]. IEEE Access,2018,6:76153-76164.
[8] "Zhu H J, Zhang B, Wu L H. Output power stabilization for wireless power transfer system employing primary-side-only control[J]. IEEE Access, 2020, 8:63735-63747.
[9] "Zhang F C, Shi L M, Yin Z G, et al. A current balance control strategy applied in inductively coupled power transfer system with multiple parallel pickup modules[J]. IEEE Transactions on Vehicular Technology, 2019, 68(3): 2207-2217.
[10] "Jou H L, Wu J C, Wu K D, et al. Bidirectional DC–DC wireless power transfer based on LCC-C resonant compensation[J]. IEEE Transactions on Power Electronics, 2021, 36(2): 2310-2319.
[11] "Zhou Z, Zhang L Y, Liu Z T, et al. Model predictive control for the receiving-side DC-DC converter of dynamic wireless power transfer[J]. IEEE Transactions on Power Electronics, 2020,35(9): 8985-8997.
[12] "Yeo T D, Kwon D, Khang S T, et al. Design of maximum efficiency tracking control scheme for closed-loop wireless power charging system employing series resonant tank[J]. IEEE Transactions on Power Electronics,2017,32(1):471-478.
[13] "袁李君,王晶晶,陈国东,等.基于模糊控制的无线电能传输系统最优效率点跟踪方法[J].广东电力,2018,31(11):52-58.
Yuan L J, Wang J J, Chen G D, et al. Tracking method of optimal efficiency point of WPT system based on fuzzy control [J]. Guangdong Electric Power,2018,31(11):52-58.(in Chinese)
[14] "Tan T , Chen K N, Lin Q Q ,et al. Impedance shaping control strategy for wireless power transfer system based on dynamic small-signal analysis[J]. IEEE Transactions on Circuits and Systems I: Regular Paper,2021,68(3): 1354-1365.
[15] "檀添,陈凯楠,林秋琼,等.多接收端无线电能传输系统动态特性分析及多目标参数优化[J].清华大学学报(自然科学版),2021,61(10):1066-1078.
Tan T, Chen K N, Lin Q Q, et al. Dynamic analysis and multi-objective parameter optimization in multi-receiver wireless power transfer systems[J]. Journal of "Tsinghua University(Science and Technology) ,2021,61(10):1066-1078.(in Chinese)
[16] "Shi W L,Deng J T,Wang Z P,et al. The start-up dynamic analysis and one cycle control-PD control combined strategy for primary-side controlled wireless power transfer system[J]. IEEE Access,2018,6:14439-14450.
[17] "Neath M J,Swain A K,Madawala U K,et al. An optimal PID controller for a bidirectional inductive power transfer system using multiobjective genetic algorithm[J]. IEEE Transactions on Power Electronics,2014,29(3):1523-1531.
[18] "吴静,王智慧.基于可控电感的感应电能传输系统效率优化[J].电源技术,2016,40(10):2048-2050.
Wu J, Wang Z H. Optimization on efficiency of inductively coupled power transfer system based on controllable inductance[J]. Chinese Journal of Power Sources,2016,40(10):2048-2050.(in Chinese)
[19] "王云鹤, 刘姜涛, 邓其军, 等. 基于可调电感的无线能量传输系统优化设计[J]. 武汉大学学报:工学版, 2018, 51(1): 85-90.
Wang Y H, Liu J T, Deng Q J, et al. Optimal design of wireless energy transmission system based on adjustable inductance[J].Engineering Journal of Wuhan University,2018,51(1):85-90.(in Chinese)
[20] "程泽, 吕月铭, 刘琦, 等. 基于磁放大器的耦合谐振式无线电能传输自适应调谐研究[J]. 电工技术学报, 2018, 33(S2): 305-312.
Cheng Z, LYU Y M, Liu Q, et al. Research of adaptive tuning magnetically coupled resonant wireless power transfer system based on magnetic amplifier[J]. Transactions of China Electrotechnical Society,2018,33(S2):305-312.(in Chinese)
[21] "Thenathayalan D, Park J H. Highly flexible high-efficiency multiple-resonant wireless power transfer system using a controllable inductor[J].IEEE Journal of Emerging and Selected Topics in Power Electronics,2019,7(3): 1914-1930.
[22] "Shin J , Outeiro M T ,Czarkowski D. New real-time tuning method for wireless power transfer systems[C]// 2016 IEEE Wireless Power Transfer Conference (WPTC). Aveiro, Portugal: IEEE,2016:1-4.
[23] "谢克明, 夏路易,渠云田. 可控电感式异步发电机自动调压装置的研究[J]. 太原工业大学学报, 1990, 21(4): 56-61.
Xie K M, Xia L Y, Qu Y T. Investigation into the voltage regulator with controllable inductance for an asynchronous generator [J]. Journal of Taiyuan University of Technology,1990, 21(4):56-61.(in Chinese)
[24] "李明勇,陈敏,翟建勇,等.高频电感线圈损耗的分析和计算[J].电力电子技术,2007,41(9):47-49.
Li M Y,Chen M, Zhai J Y, et al. Analysis and calculation of winding losses of high frequency inductors [J]. Power Elecfronics,2007, 41(09):47-49.(in Chinese)
[25] "梁泽. 基于相轨迹的Buck-IPT系统动态过程优化控制研究及实现[D]. 重庆:重庆大学, 2018.
Liang Z. Research on optimal control for dynamic process of "Buck-IPT system based on state-trajectory[D].Chongqing: Chongqing University, 2018.(in Chinese)
[26] "钟良亮,刘羽,梁泽,等.基于相轨迹规划的Buck-IPT系统滑模控制方法[J].广东电力,2018,31(11):39-45.
Zhong L L, Liu Y, Liang Z, et al. Sliding mode control for Buck-IPT system based on phase-trajectory planning[J]. Guangdong Electric Power,2018,31(11):39-45.(in Chinese)
(编辑 "侯湘)
doi:10.11835/j.issn.1000.582X.2024.06.011
收稿日期:2022-08-12
网络出版日期:2024-05-08
基金项目:国网浙江省电力有限公司科技项目(B311NB210005)。
Foundation:Supported by State Grid Zhejiang Electric Power Co., Ltd. Technology Project (B311NB210005).
作者简介:凌荣光(1974—),男,硕士,主要从事可控电感和电力市场营销方向研究,(E-mail) 471361406@qq.com。
通信作者:刘巧,女,(E-mail) liuqiao0924@163.com。